一种汽车焊装夹具五面体系统的设计
2019-01-02金美华王晓勇杨新春王金潇
金美华,王晓勇,杨新春,王金潇
(南京工业职业技术学院机械工程学院,江苏 南京 210023)
1 基本需求
根据汽车生产线的基本构造和实际要求,分析汽车组装及焊接生产工艺,可知五面体系统需满足以下需求[1]:汽车分装焊接块装夹;机器人焊接控制;焊接装夹的装配工序与工艺流程控制;机器人数量与动作节拍协调;干涉区的规避;五面体夹具的旋转控制与稳定性保持等。
2 机械结构与工作原理
为克服原有夹具库的夹具更换节拍慢、动作繁琐的不足[2],本文设计了一种新型M30汽车组合夹具,其结构由转台、五面体结构和夹具等组成,通过底部的大转台带动五面体切换到各个面的精准位置,以便于根据车型切换夹具或进行后续的机器人焊接加工。
2.1 夹具的组成
1)转台。转台是位于夹具最底层的旋转机构,由伺服电机驱动,用于控制五面体的转动。伺服电机尺寸精度为2.5mm,在转台底部安装有固定销,以固定转台位置,保证加工时焊接的定位精度。
2)五面体。五面体上有5个夹具置换位,用来放置夹具或者机械抓手,以满足多种工序同时进行的需求,如机器人抓取和焊枪焊接时,机械手首先抓取工件放置在夹具的置换位上,然后自动更换焊枪完成焊接。五面体夹具库的每个置换位上有一个快插模块,用来给夹具传递通讯信号和气源动力,实现夹具的自动化。
3)夹具。用于固定汽车板件,辅助焊接工作的完成,并确保焊接时的准确性[3]。
2.2 工作原理
系统通过可编程逻辑控制器(PLC)设定好汽车型号后,由特定传感器检测汽车板件到位,反馈信号给PLC,以判定汽车板件与选用车型的一致性;五面体旋转到工作面进行工作准备,机器人抓取工件放置到加工位,切换抓手更换焊接枪,完成后反馈信号给夹具,夹具夹紧,即可进行焊接。
五面体可以旋转到不同的工作位置,按照上述过程,循环工作,同时满足多工位的焊接需要[4]。
通常,生产线上会同时安装两套同款车型的夹具,分装在转台左、右两端,转台一端是机器人上件,另一端是机器人焊接,当两端同时完成工作后,转台自动旋转,完成上件、焊接,交替循环作业[5]。
图1为五面体转台夹具分布示意图,可根据需求自动完成各种组合工作,五面体夹具分为A、B、C、D、E 5个夹具库,可进行夹具的装夹和工具的更换,实现车型的一键更换和工作面的一键切换。
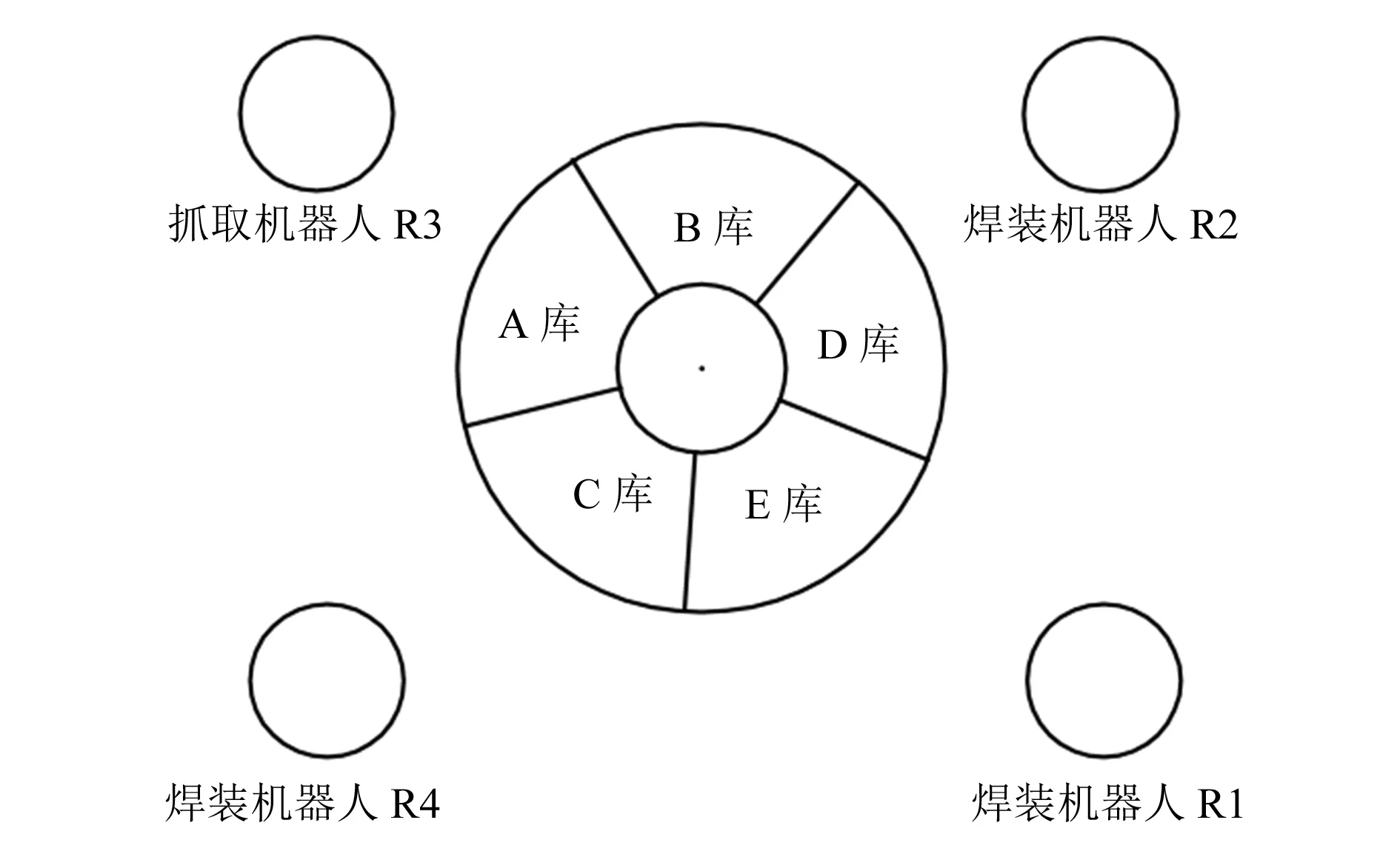
图1 五面体转台夹具分布示意图
3 气动系统
五面体系统的夹具更换由气动控制系统完成,图2是夹具加工气动系统原理图。通常,系统通过以下动作完成工件的装夹:首先定位销开销,然后夹具张合完成工件的更换和夹紧,最后定位销退出,夹紧的气缸缩回。
4 PLC控制系统
4.1 PLC硬件组态
本文的PLC选择S7-300的317FCPU和MPI/DP总线。首先打开S7-300站点,插入BACK-300底板、PS-300电源和317FCPU,然后MPI/DP总线接口选择Profibus接口。创建网络后再插入已选择的模块,修改起始地址,最后即可创建硬件组态,如图3所示。
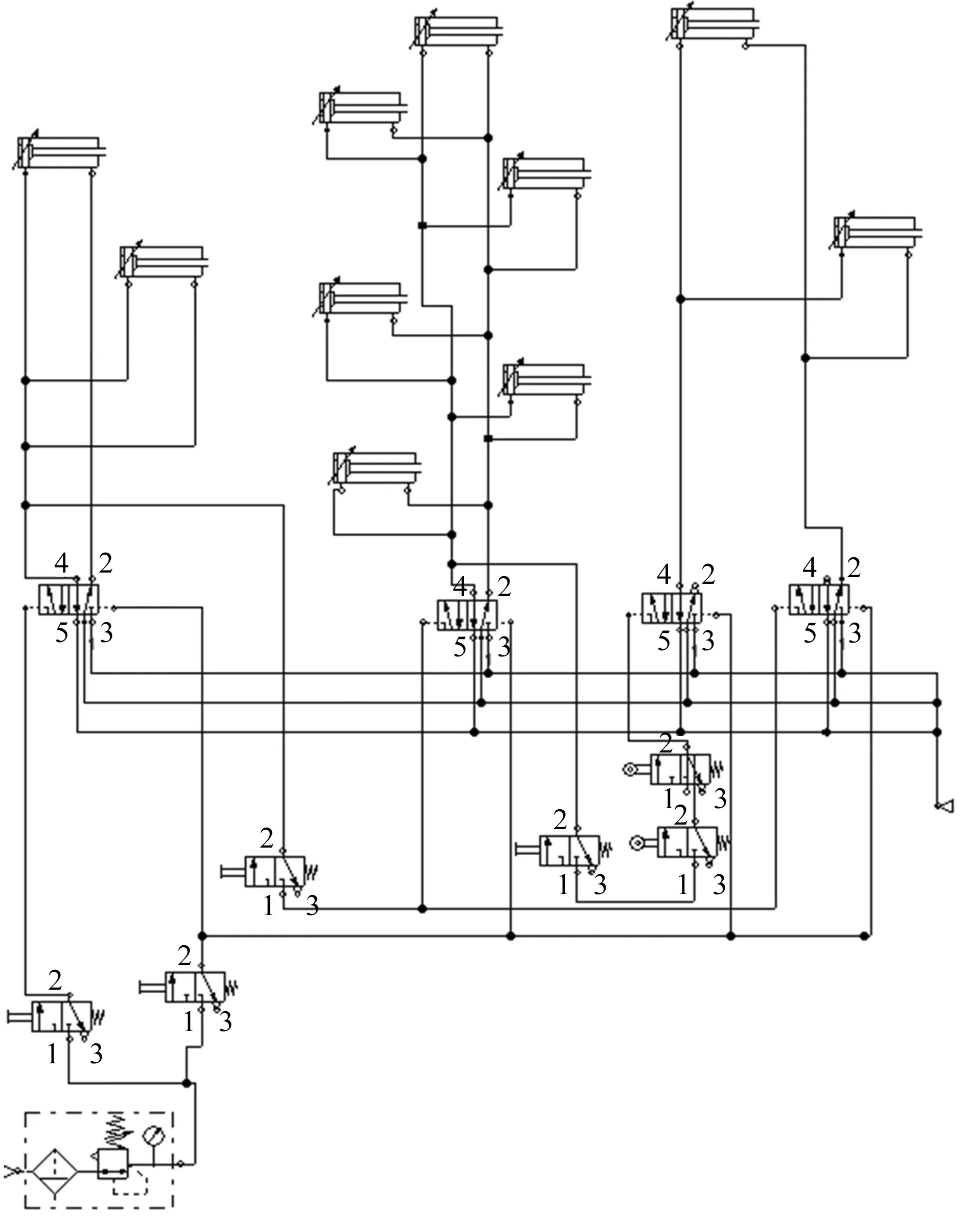
图2 夹具加工的气动系统原理图

图3 硬件组态图
4.2 STEP7管理器的I/O分配
S7-300 PLC采用STEP7编程软件编程和仿真,设置的部分IN分配表见表1,OUT分配表见表2。

表1 部分IN分配表
5 结束语
本文设计的新型五面体夹具实现了生产线库区的自动化、动作的连贯化和整体化,夹具与夹具之间的更换可自动完成。通过转台与组合夹具的协同动作,优化了工作过程,克服了原有夹具库夹具更换节拍慢、动作繁琐的不足,有效提高了生产线的工作效率。
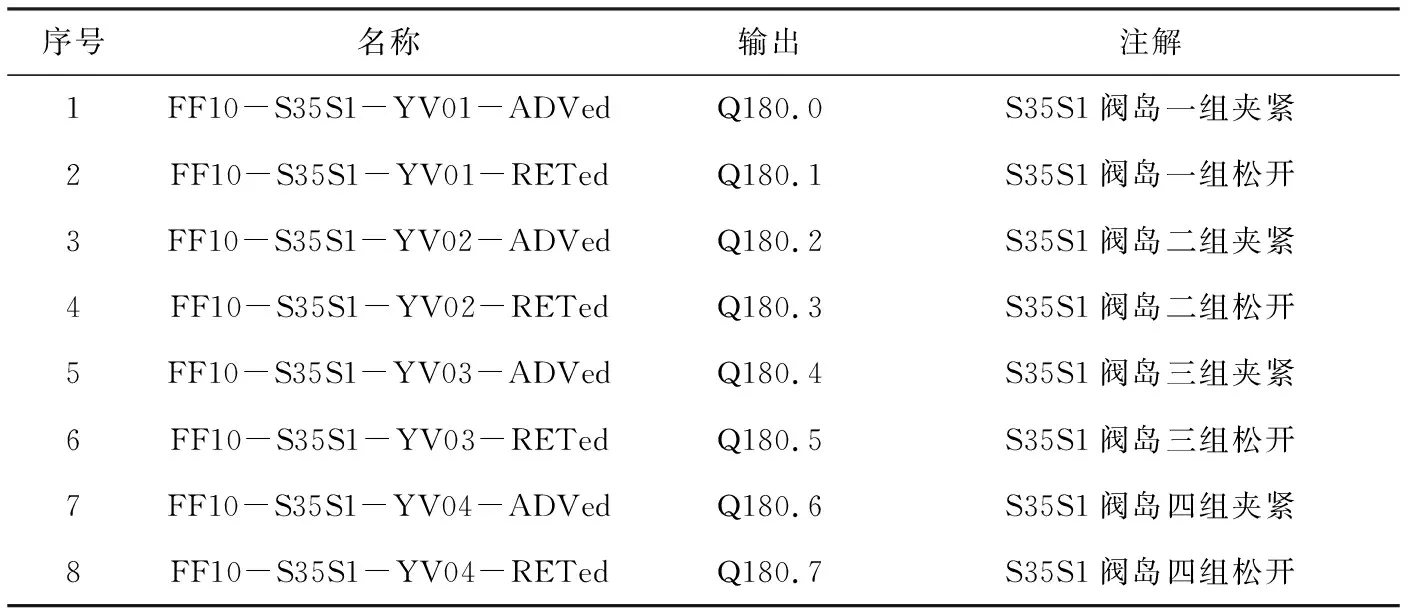
表2 部分OUT分配表
