基于前馈控制的压缩机负载转矩补偿方法
2018-12-29区均灌徐常升
刘 玲,区均灌,于 波,徐常升
(珠海格力电器股份有限公司,珠海519070)
0 引言
目前,市场上大力推广的直流变频空调的压缩机内部因受环境限制,无法安装位置编码器,而是采用位置观测器来估算压缩机内部永磁同步电动机的转子位置[1]。由于在位置观测器中插入了低通滤波器,导致相位延迟,使压缩机驱动控制系统的输出转矩无法准确、迅速地跟随实际负载的变化,导致负载转矩脉动,产生转速波动[2]。
在低速运行时,压缩机气体体积变化引起的负载转矩脉动会引起很大的转速波动,从而产生低频振动和噪声[3-5]。因此,研究一种负载转矩补偿方法来改善压缩机的低频性能是十分必要的。
本文提出的转矩前馈补偿器实际上是对负载转矩补偿幅值和转矩补偿角的计算[6]。首先采用滑模观测器(SMO)来获取永磁同步电动机的转速,进而在得到转速波动的基础上提取其基波分量;然后采用滤波器获得转矩补偿幅值和转矩补偿角,最后将补偿量反馈给电流环的输入端,对交轴(q轴)电流进行补偿。仿真结果表明,加入了负载转矩前馈补偿的压缩机驱动系统转矩脉动减少,转速波动明显降低,证实了所提方法的有效性。通过实验结果证明,采用负载转矩前馈补偿后,压缩机振动减小,噪声降低,更深入证明了算法的可靠性。
1 滑模观测器算法
1.1 永磁同步电动机的数学模型
永磁同步电动机的d-q轴模型磁链方程[7]:

式中:ψd,ψq为 d,q 轴磁链;Ld,Lq是 d,q 轴电感;id,iq为d,q轴电流;ψf为定子永磁体产生的励磁磁链。
d,q轴模型电压方程:
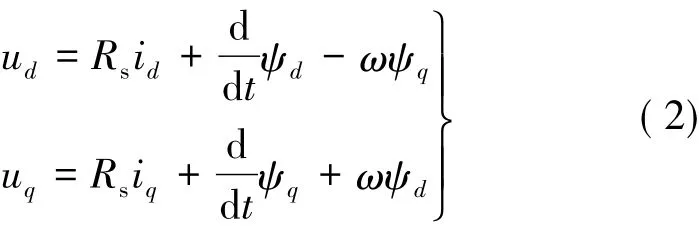
式中:ud,uq为 d,q轴电压;Rs为定子绕组电阻;ω为电机转子的角速度。
d,q轴模型转矩方程:

式中:p表示电机极对数。
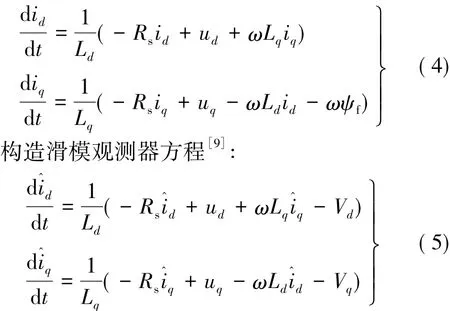
1.2 滑模观测器设计
根据式(1)和式(2),定子电流的动态系统方程[8]:
选取开关函数[10]:

式中:ksmo为滑模增益。
通常采用Boundary Layer的方法来抑制滑模控制所产生的抖振现象,取:

式中:E为饱和函数的阈值。

2 基于前馈控制的负载转矩补偿方法
永磁同步电动机的转速波动值[11]:

电机转速波动的基波分量值:

式中:k为放大倍数;θlcom为转矩补偿角。
转矩补偿角可通过下式计算得到:

式中:Tf为低通滤波器的时间常数;为滑模观测器观测的机械角速度,且有
利用高通滤波器得到转矩补偿值:

式中:Thf为高通滤波器的时间常数;s为拉普拉斯算子。
q轴电流环补偿值:

式中:kt为转矩系数。
基于前馈控制的压缩机负载转矩补偿系统框图如图1所示。采用滑模观测器来观测永磁同步电动机的角速度ω^,在得到转速波动nωrip的基础上,提取其基波分量nωripb,然后采用滤波器获得转矩补偿幅值Tlcom和转矩补偿角θlcom,最后将补偿量反馈给系统q轴速度环的输出端,即电流环的输入端,对q轴电流进行前馈补偿[12]。
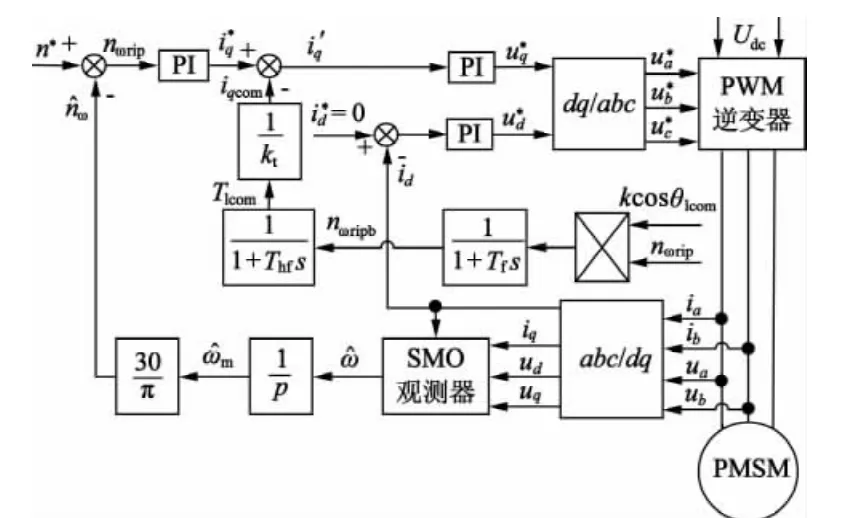
图1 系统控制框图
3 仿真结果
为了验证所提出方法的正确性,本文采用了MATLAB对基于前馈控制的压缩机负载转矩补偿控制系统进行建模仿真[13]。仿真模型中,永磁同步电动机采用珠海凌达压缩机有限公司生产的单转子压缩机QXA-B102zE190,其内部电机为永磁同步电动机,参数如表1所示。令直流侧母线电压为540 V,电机的三相输入电压为180 V,频率为50 Hz,相位相差120°电角度,系统仿真时间为0.5 s,采样时间T=0.05 ms,给定转速为1200 r/min。负载转矩是根据国标工况下实际测得的数值所拟合而成的周期性负载。在0.3 s时,在控制系统中加入前馈负载转矩补偿算法。
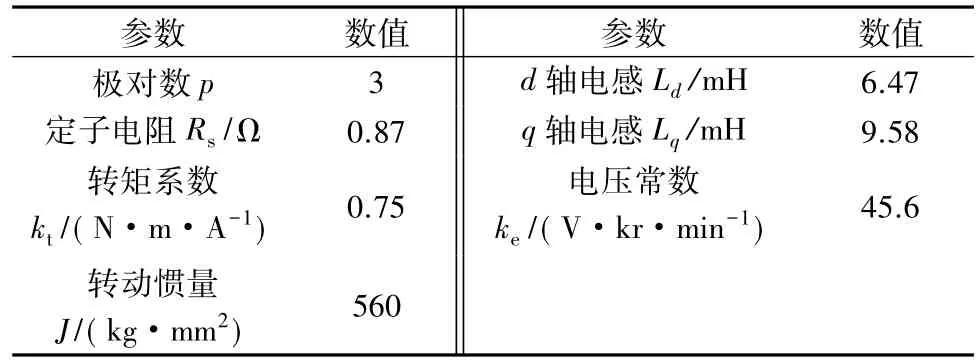
表1 电机参数

图2 变化曲线
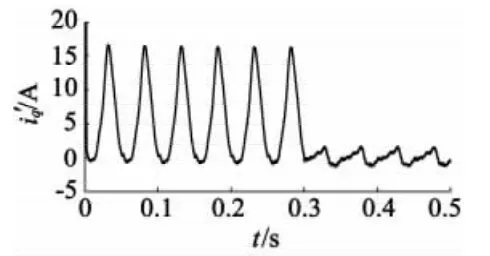
图3 变化曲线

图4 iqcom变化曲线

图5 速度响应曲线
4 实验结果
本文选取一台空调外机所用的单转子压缩机QXA-B102zE190,电机参数见表1。将接入压缩机的噪声实验台设定为国标工况,从示波器上观察加入转矩补偿算法前后的电流值,并通过噪声测试软件记录压缩机在低频时的噪声。
从图6可以看出,开启负载转矩补偿算法和关闭负载转矩补偿算法的瞬间,电流均有波动,但很快恢复。将图6分区间进行放大,得到图7和图8。从图7和图8对比看出,加入转矩补偿算法后,q轴电流环给定值与q轴电流环输入值的波形不再重合明显减小,接近于零,这与仿真结果相吻合。

图6 电流和电压波形
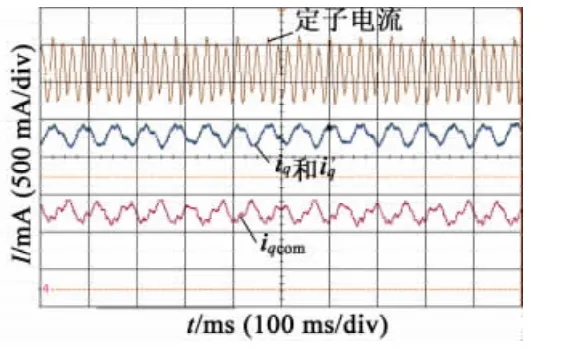
图7 开启转矩补偿算法前的电流和电压波形

图8 加入转矩补偿算法后的电流和电压波形
在国标工况下,通过噪声实验台和噪声测试软件,对无负载转矩补偿算法和有负载转矩补偿算法的压缩机驱动控制系统分别测试,测得压缩机及配管在低频段的噪声值如表2所示。

表2 压缩机及配管噪声测试数据
从表2数据可以看出,在压缩机转速较低时,尤其是在转速1500 r/min下,前馈负载转矩补偿作用明显,噪声明显降低,实验结果证明了算法的可靠性。
5 结语
本文在采用滑模观测器来获取永磁同步电动机转速的基础上,提取转速波动的基波分量,然后采用滤波器获得转矩补偿幅值和转矩补偿角,最后将补偿量反馈给电流环输入端,对交轴电流进行补偿。仿真结果表明,加入了前馈负载转矩补偿的压缩机驱动系统转矩脉动减少,转速波动明显降低,证实了所提方法的有效性。通过实验结果证明,采用前馈负载转矩补偿后,压缩机的转速波动变小,压缩机与配管的振动幅度减小,噪声降低,更深入证明了算法的可靠性。