电动汽车集成车载大功率充电器的研究
2018-12-29张乐,杨强,赵刚
张 乐,杨 强,赵 刚
(1.无锡太湖学院江苏省物联网应用技术重点建设实验室,无锡214064;2.国网常熟供电公司,苏州 215000)
0 引言
随着社会的发展,能源短缺问题日益凸显,同时环境污染也不断加重,这种情况引起社会对新型清洁能源的广泛研究。电动汽车以其在环保节能方面的优点,已经成为新能源研究领域的重点。由于电动汽车内部空间和生产成本的限制,蓄电池快速充电技术一般需要通过大功率充电桩或充电站实现(15 kW或以上),而车载充电器功率一般小于5 kW,并且目前研究的车载充电系统普遍存在成本高、体积大、质量大、功率因数低、谐波污染严重等问题,严重制约了电动汽车的发展[1]。
将电动汽车的电机驱动系统重构成蓄电池充电系统,通过优化电路拓扑和控制策略,在满足电动汽车充电电流质量的同时,能够省去额外的大功率充电器,达到降低电动汽车的体积质量和成本的目的,实现无需充电桩即可快速充电的能力,这种将驱动系统和充电系统集成的拓扑结构近年来获得了大量的关注[2-8]。
感应电机和永磁同步电机在驱动充电集成化拓扑中研究较多[3],但是存在着在充电模式下可能会产生转矩的严重问题。采用并联电机三相绕组,通入单相电源充电能够避免产生额外的转矩,但是充电功率受到限制[4]。此外,采用多相电机[5]结构、分裂绕组结构[6],能够通过电机内磁场抵消或电机各相输出的正负转矩相抵消,以实现充电状态下不输出转矩。另外,采用多台电机并联[7]同样能实现输出转矩为0,但是这些方法只适用于多相或多台电机,可能需要对电机本体做相应的修改,额外抽出电机绕组才能够实现,同时功率器件的增多会导致成本上升,且大多不能实现电气隔离,或经过电气隔离后充电效率会大大降低。
文献[8]提出了一种由LC型高频滤波器、二极管整流器、3-H桥逆变器、磁组合变压器、不控整流滤波电路和开绕组感应电机组成的拓扑,用于充电与驱动集成化拓扑,具有功率因数高、电气隔离、单级升/降压等优点,但是同样的,其拓扑结构复杂,功率器件较多,成本相应较高。
目前,在电动汽车中永磁电机应用较为广泛,但由于电机内永磁体的存在,电机绕组电感值一般较小,用于电动汽车集成车载大功率充电时,充电电流纹波和网侧电流纹波会较大,造成充电质量下降,并且网侧电流THD大,因此,无永磁体电机更适用于集成车载大功率充电系统。12/10极电励磁双凸极电机(以下简称DSEM)是一种结构简单、运行可靠、宽转速范围且功率密度高的电机,又称游标电机,不同于传统DSEM。通过结构优化,该电机能够形成类似于无刷直流电机的方波反电动势,并能够以方波或正弦波电流进行正常驱动,从而克服了双凸极电机转矩脉动大的固有缺陷,成为电动汽车驱动电机的可靠选择[9]。此外,由于DSEM绕组自感大、自感大小恒定、蓄电池充电模式下能够不产生转矩,所以无需采用多相电机结构和多余的功率变换器,且充电运行时电流纹波小,特别适用于电动汽车集成化充电系统。
本文研究了一种基于12/10极DSEM的集成车载大功率充电器,将该电机励磁绕组复用为前级DC/DC变换器中的电感,电枢绕组复用为充电状态时三相桥式整流器的滤波电感,以正弦波脉宽调制(以下简称SPWM)和空间矢量脉宽调制(以下简称SVPWM)两种方式对三相桥式整流器进行控制,实现充电时电流纹波小、无转矩输出等特点,并通过仿真验证了所述系统能够实现较好的充电特性,为电动汽车大功率充电应用提供了一种新的系统结构。
1 大功率集成化充电系统
1.1 DSEM结构及转矩模型
图1为一种新型的DSEM。该电机定转子极数分别为12极和10极,由电枢绕组、励磁绕组以及定转子组成,电枢绕组与励磁绕组均位于定子槽间,六相绕组两两反向串联,电磁特性高度互补,形成类似于无刷直流电机的方波反电动势,从而相比于传统DSEM能够有效降低转矩脉动。
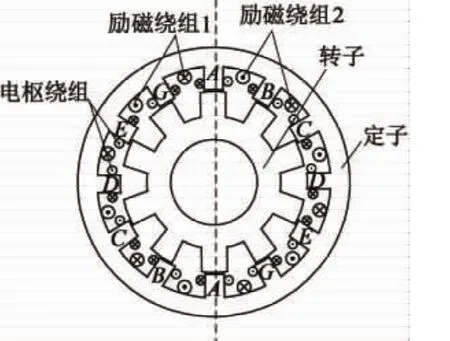
图1 12/10极DSEM
根据DSEM的基础理论,其输出电磁转矩的表达式:

式中:Te为输出转矩;Tsr为自感磁阻转矩;Tmr为互感磁阻转矩;Tf为励磁转矩;ia,ib,ic为三相电流;La,Lb,Lc为三相自感;Lab,Lbc,Lca为电枢绕组间三相互感;Laf,Lbf,Lcf为电枢绕组与励磁绕组间三相互感;θ为转子机械角度。
由于12/10极DSEM电枢绕组自感和电枢绕组间互感值大小恒定,由式(2)、式(3)可知,其充电状态下自感磁阻转矩和互感磁阻转矩大小均为0,故其输出转矩中仅励磁转矩不为0。为了使系统在充电模式工作时总的输出转矩为0,避免产生额外的损耗,所以,在所提集成化充电系统中,该12/10极DSEM励磁绕组分为两段,在充电模式时,两段励磁绕组反向串联,实现去磁充电,从而使得电机在充电时能够不产生额外的转矩。
1.2 系统拓扑结构
图2为基于12/10极DSEM的集成化充电系统拓扑结构,其主电路由蓄电池、前级DC/DC变换器、后级三相逆变器、DSEM、切换开关等构成。前级DC/DC变换器由DSEM的两段励磁绕组、6个开关管Q1~Q6和2个二极管D1~D2构成,DC/DC变换器输出端接电容C,作为后级逆变器的输入,双凸极电机电枢绕组一端接逆变器的输出,另一端连接至三刀双掷切换开关K1。
在正常电机驱动模式下,切换开关K1连接至线路1,使得电机三相中性点Y型连接,切换开关K2闭合,前级 DC/DC变换器以交错并联四管Buck/Boost变换器进行工作,能够同时控制电机励磁绕组电流大小和输出直流母线电压大小,然后级联逆变器后驱动DSEM。在电池充电模式下,切换开关K1连接至线路2,即电机三相中性点断开并连接至三相电网,切换开关K2打开,驱动工作时的逆变器作为三相桥式整流器,而前级DC/DC变换器用作为Buck形式的变换器。当三相插座连接电网后,电网提供的三相交流电,经过三相桥式整流器整流后变为直流电,再经过DC/DC变换器后实现恒流充电。
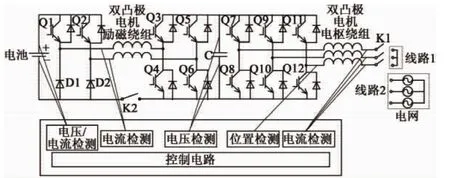
图2 大功率集成化充电系统拓扑结构
2 系统充电模式工作原理
充电模式下的控制器由两部分组成,一个是前级DC/DC变换器用于控制恒流充电的电流闭环控制器;另一个用于三相桥式整流器的电压外环与电流内环构成的三相电压型PWM控制器。
2.1 前级DC/DC变换器控制策略
图3为充电模式下前级DC/DC变换器电流回路示意图。当开关管Q3或Q6以PWM方式工作时,DC/DC变换器能够工作于Buck模式,通过调节占空比的大小即可调节充电电流的大小。由于Buck变换器输出类似于恒流源,从而便于实现电池恒流充电。此外,通过两段励磁绕组串联,其通过的电流大小相等,方向相反,使得双凸极电机一半区域产生正转矩,另一半区域产生负转矩,从而相互抵消,在充电模式下整体对外不产生转矩,不会产生额外的能量损耗。

图3 前级DC/DC变换器充电模式电流回路
2.2 基于SPWM的三相桥式整流器工作原理
SPWM将与期望输出电压频率相同的正弦波用作调制波,以高频三角波为载波,通过二者交截来确定开关管的通断,最终获得脉宽时间占空比按正弦规律变化的脉冲序列。
图4为基于SPWM的三相桥式整流器控制框图。该系统由电压外环和电流内环嵌套构成,电压给定信号与实际直流侧电压输出Udc作差后,作为电压环PI调节器的输入,输出为直轴电流给定信号,而交轴电流给定设为0。电机三相电枢绕组电流信号经过Clarke变换和Park变换后转变为交轴电流分量和直轴电流分量,与给定交直轴分量做差后,作为电流环PI调节器的输入,再经过Park以及Clarke逆变换转变为三相静止坐标系下的电压信号Ua,Ub,Uc,通过SPWM 模块输出 PWM信号控制三相桥式整流器。

图4 基于SPWM的三相桥式整流器控制框图
2.3 基于SVPWM的三相桥式整流器工作原理
SPWM由于存在固有的死区延时、以及电压利用率不高的问题,其实际控制性能较差。而SVPWM是直接跟踪控制电机的圆形旋转磁场,以此产生准圆形旋转磁场和恒定的电磁转矩。相比于一般用于三相桥式整流器的SPWM,SVPWM具有以下优点:电压利用率提高15.47%;开关次数可以减少1/3;动态性能好;网侧输入电流正弦度高;谐波污染小等[10]。
图5为基于SVPWM的三相桥式整流器控制框图。与图4基于SPWM的控制器类似,通过坐标变换实现解耦控制,差异在于SVPWM模块的输入量为Uα,Uβ和Udc,相比于图4的控制器,在坐标变换中无需Clarke逆变换的过程。
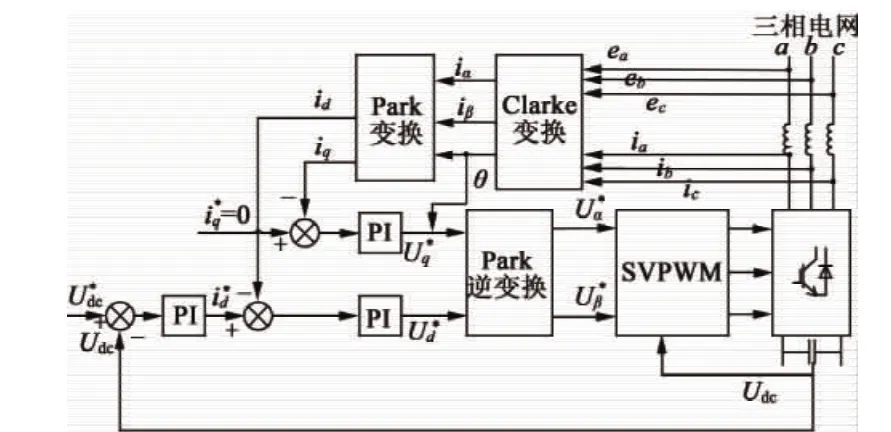
图5 基于SVPWM的三相桥式整流器控制框图
3 仿真分析
3.1 DSEM 有限元仿真
表1为仿真所用DSEM的电机结构参数,通过ANSYS软件,以该电机参数搭建了如图6所示的12/10极DSEM有限元仿真模型。在额定转速条件下,当两段励磁绕组均通入40 A励磁电流后,电机每相电枢绕组反电动势波形如图7所示,其反电动势波形类似于无刷直流电机(以下简称BLDCM),故能够以BLDCM的三相导通模式运行,不同于传统的DSEM的两相导通运行模式,该电机转矩脉动能够大大减小,因此能够适用于电动汽车的应用。

表1 仿真用DSEM结构参数
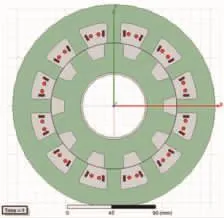
图6 12/10极DSEM有限元模型

图7 12/10极DSEM反电动势波形
3.2 基于SPWM控制的三相桥整流器仿真
在DSEM有限元仿真模型的基础上,搭建了基于Simplorer的功率变换器模型和基于MATLAB的控制器模型,仿真参数如表2所示。

表2 仿真系统参数
基于SPWM的充电稳态仿真结果如图8所示。其中,充电侧电池上串联了一个负载电阻,作为额外的负载以验证系统更高功率的充电能力。当负载电阻大小为10 Ω时,相电流稳态峰值大小为85 A。从图8中可以看出,直流侧电压几乎没有波动,交流侧电流纹波较小,且功率因数高,故充电模式下系统稳态性能较好。此外,对交流侧相电流总谐波失真(THD)进行了定量分析,通过POWERGUI的快速傅里叶分解,选定10个周期,分析结果如图9所示,其总谐波量5.60%,谐波分量主要集中在2、4、6次谐波,谐波含量均在0.25%以下,谐波含量基本能够满足电网对谐波含量要求。
基于SPWM的充电起动过程直流侧母线电压大小如图10所示,该电压有20 V左右的超调,调节时间为5.8 ms,并在8 ms左右进入稳态。

图8 基于SPWM的充电稳态仿真
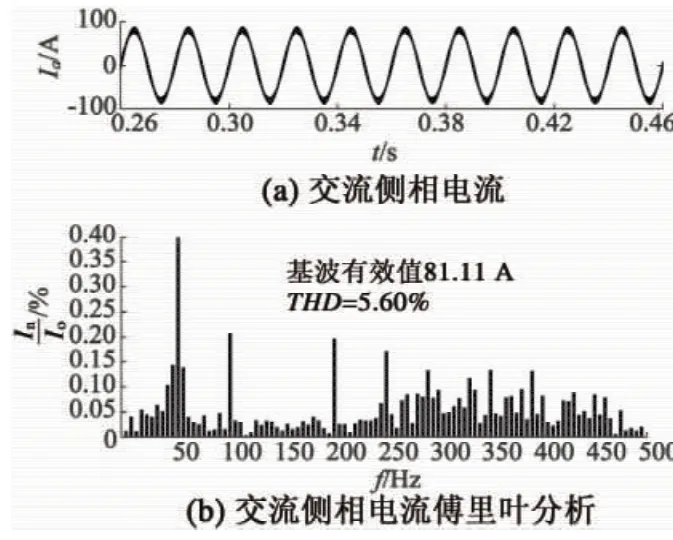
图9 基于SPWM控制的充电稳态电流THD分析
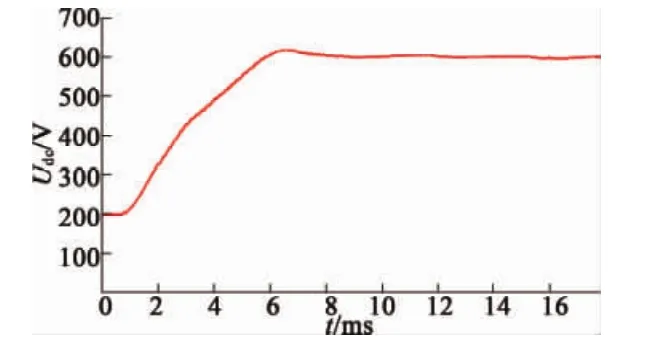
图10 基于SPWM的充电起动过程直流母线电压仿真波形
充电加载过程如图11所示,在系统通入三相电网电源后,交流侧电流通过SPWM,能够实现单位功率因数调制,相电流幅值大小约为30 A。当仿真时间为0.2 s时,在整流后的母线电压上串联一个10 Ω的负载电阻,用以考察负载切换工况下的仿真结果,经过一个工频周期后,电流波形逐渐稳定,电流幅值大小上升为85 A,同时直流侧电压大小也逐渐稳定在600 V,动态性能较好。
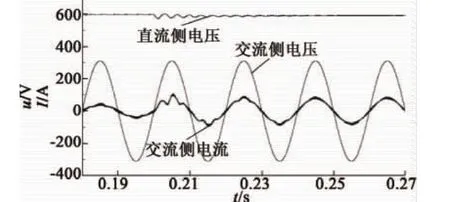
图11 基于SPWM的充电加载过程仿真
3.3 基于SVPWM的三相桥整流器仿真
采用SVPWM的仿真条件与仿真过程均与采用SPWM的相同,以保证在相同工作条件下比较其动态和稳态性能。图12为电池串联10 Ω负载电阻时稳态交流侧电压、电流波形和直流侧电压波形。与采用SPWM相似,直流侧电压、交流侧电流纹波均较小,且功率因数高,故系统稳态性能较好。选定相电流波形10个周期后,对交流侧相电流THD进行了定量分析,得到如图13所示的分析结果,其谐波量为3.04%,相比 SPWM 的 5.60%有所减少,SVPWM的谐波分量主要集中在8次、9次谐波,谐波含量均在0.7%以下,能够满足电网对谐波含量要求。
图14为采用SVPWM的充电起动过程直流母线电压仿真波形。相比于图10的采用SPWM,该电压没有超调,在7 ms左右即进入稳态,采用SVPWM的动态性能要好于采用SPWM的。

图12 基于SVPWM的充电稳态仿真结果
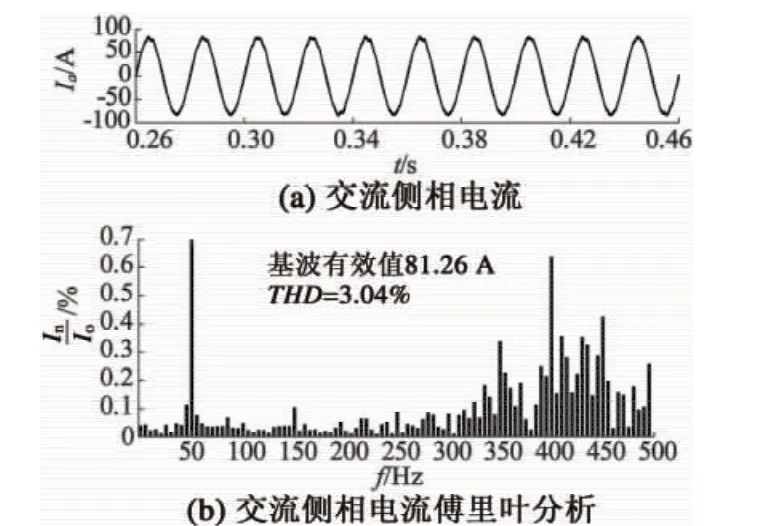
图13 基于SVPWM的充电稳态电流THD分析
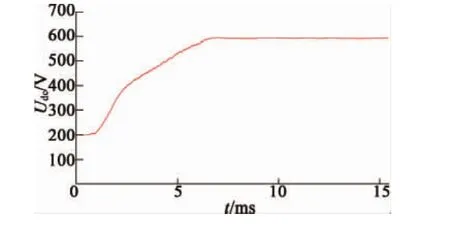
图14 基于SVPWM的充电起动过程直流母线电压仿真波形
充电加载过程如图15所示,在通入三相电网电源后,初始相电流幅值大小同样为30 A左右,但相比于图11的相电流波形,其电流纹波明显减小。当仿真时间为0.2 s时,在整流后的母线电压上串联一个10 Ω的负载电阻,用以考察负载切换工况下的仿真结果,在经过半个工频周期后,电流波形逐渐稳定,电流幅值大小上升为85 A,同时直流侧电压大小也逐渐稳定在600 V,相比于SPWM控制动态性能更佳。

图15 基于SVPWM的充电加载过程仿真
3.4 电池充电联合仿真
基于ANSYS和MATLAB软件对系统充电过程进行了20 kW的有限元联合仿真,通过有限元联合仿真,能够较为准确地得到电机上的铁耗和铜耗大小,并且考虑电力电子器件的开关和导通损耗,从而仿真结果更为准确。
当电池电压为200 V,串联4.2 Ω时,电池充电电流波形如图16所示。电流经3.25 ms到达稳态,从图16中可以看出,稳态时电流能够稳定于给定电流附近,在45 A上下波动,纹波电流大小为10 A,该纹波与电机励磁绕组电感和开关频率有关,与三相桥式整流器的输出电压大小相关。电池充电电流受到DC/DC变换器的电流滞环控制,由于采用SPWM和SVPWM两种控制方式下直流母线电压大小相差不大,所以两种控制方式下电池侧充电电流波形相同。
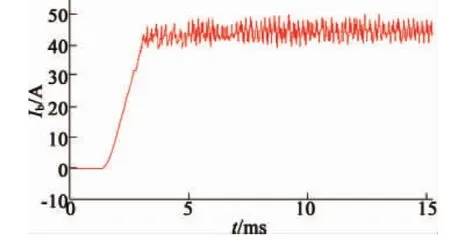
图16 电池充电电流仿真波形
图17 为20 kW充电模式稳态时的电机输出转矩。其输出转矩平均值为0,输出转矩幅值为1.3 N·m,频率为100 Hz,该输出转矩主要由电机的凸极效应和电机磁场不平衡引起,可能会导致充电状态时电机产生振动噪声和额外的损耗,但由于该转矩相比于额定转矩38 N·m较小,而与电机齿槽转矩大小相近,故产生的振动噪声能够忍受。

图17 充电模式下电机输出转矩
图18 为电网稳态输出瞬时功率。该输出功率近似为20 kW,经过计算可以得知,电池侧输出功率近似为17.5 kW,故系统在20 kW时充电效率为87.5%。系统损耗包含电机电枢绕组和励磁绕组的铜耗、电机铁耗和电力电子器件的导通损耗和开关损耗,其中仿真得到的电机铁耗为400 W左右,由于仿真时电机绕组的电阻值设置相对较大,系统损耗中铜耗占比较大,且该系统中电机未针对集成化驱动充电系统进行专门的优化,从而导致了该系统效率小于传统大功率DC/DC变换器,如若电机设计合理,系统效率将明显上升。
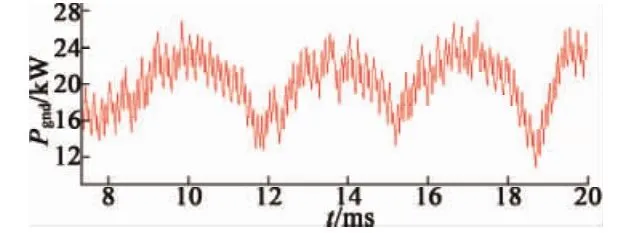
图18 电网输出瞬时功率仿真波形
5 结语
本文主要围绕基于12/10极DSEM的集成化驱动充电系统,从理论分析和仿真研究等方面,对该系统的充电特性展开了研究。本文介绍了DSEM的结构和转矩模型,通过ANSYS/Simplorer和MATLAB软件,搭建了基于12/10极DSEM的有限元联合仿真系统模型,对比分析了SPWM控制器和SVPWM控制器的原理和仿真结果,得出SVPWM动态性能更好的结论,并且验证了该系统充电时电网侧谐波含量低、充电电流纹波小、输出脉动转矩小的特点,证明了该集成化拓扑结构的可行性。