无线Mesh自组网技术在室内定位的应用
2018-12-29刘多纳杨晓辉
刘 宇,刘多纳,杨晓辉,杨 磊
(重庆邮电大学 光电信息感测与传输技术重庆市重点实验室,重庆 400065)
10.3969/j.issn.1003-3114.2018.01.08
刘宇,刘多纳,杨晓辉,等.无线Mesh自组网技术在室内定位的应用[J].无线电通信技术,2018,44(1):39-42.
[LIU Yu,LIU Duona,YANG Xiaohui,et al.Application of Wireless Mesh Ad Hoc Network Technology in Indoor Positioning [J].Radio Communications Technology,2018,44(1):39-42.]
无线Mesh自组网技术在室内定位的应用
刘 宇,刘多纳,杨晓辉,杨 磊
(重庆邮电大学 光电信息感测与传输技术重庆市重点实验室,重庆 400065)
针对目前一些要求较高的人员定位系统定位成本高、距离短、无法实时显示多个人员位置等问题,研究并设计一种基于无线Mesh网络与惯性传感器的室内定位系统。该定位系统解决了在室内较为封闭的环境下无法实现人员定位和定位距离受限等关键性问题。将惯性传感器与无线Mesh网络的优势结合,构建完整的星型多路径人员定位系统。通过测试该定位系统得到的数据,表明该定位系统能够较好地满足火灾救援等严峻工作环境下人员的定位需求。同时,与传统室内定位系统相比,基于无线Mesh网络的人员定位系统在组网的操作性、成本、稳定性等方面具有较大的优势。
无线Mesh网络;惯性传感器;人员定位;自组网
TN391.4
A
1003-3114(2018)01-39-4
2017-10-09
国家自然科学基金项目(61301124,61471075,61671091);重庆市科委基础研究项目(cstc2014jcyjA1350);重庆邮电大学博士启动基金项目(A2015-40);重庆科委自然科学基金项目(cstc2016jcyjA0347)
ApplicationofWirelessMeshAdHocNetworkTechnologyinIndoorPositioning
LIU Yu,LIU Duona,YANG Xiaohui,YANG Lei
(Chongqing Municipal Level Key Laboratory of Photoelectronic Information Sensing and Transmitting Technology, Chongqing University of Posts and Telecommunications,Chongqing 400065,China)
Some personnel positioning systems with higher requirements have such disadvantages as high positioning cost,short distance,unable to display real-time positions of multiple people,etc.In view of these problems,this paper studies and design an indoor positioning system based on Mesh network and inertial sensor.The system can implement personnel positioning in closed environment,and the positioning distance is not limited.Combining the advantages of wireless Mesh network with that of inertial sensor,a complete star multi-path staff positioning system is built.The test results show that this positioning system can better meet the requirements for personnel positioning in severe environment such as fire disaster.Compared with traditional indoor positioning system,the personnel positioning system based on Mesh network is advantageous in operatability,cost,stability,etc..
wireless Mesh network; inertial sensor; personnel positioning; ad hoc network
0 引言
随着室内定位技术的发展,多种室内定位导航系统不断涌现。室内定位系统能够实时感知人员当前所处的位置、状态等信息,不仅可以达到定位人员了解自己所处位置的目的,在应急救灾方面还可以让外部人员清楚地知道内部人员的位置和状态,提高救援人员调度和管理的效率[1]。
文献[2]利用ZigBee技术实现了煤矿人员的定位,文献[3]根据惯性导航与WSN的结合,设计了井下人员的定位系统,诸如此类的人员定位系统种类繁多,各有优势。基于此,本文在借鉴前人研究工作的基础上,结合无线Mesh网络的优势,利用惯性传感器自组网技术实现复杂环境下的人员定位。
1 无线惯性传感自组网技术
MEMS惯性传感器在如今的室内定位领域越发活跃,得到了广泛运用和快速发展。MEMS惯性传感器拥有其他传感器不具备的尺寸小、重量轻、功耗低等优势,且适合批量生产,能够安装在人体的颈、腰、足等身体部位,实时准确地感知人体的位置和姿态等信息,再通过无线通信的方式将这些数据发出就可以实现室内人员的定位[3]。多数室内定位系统会选择Wi-Fi、GPRS等无线通信方式,这些方式都需要提前布点,只能在网络覆盖范围内进行定位,当面对复杂恶劣环境或突发事件,以上定位方式并没有优势可言[4]。本文使用惯性传感器自组网技术实现复杂环境的人员定位。能够不受环境的约束,灵活使用,对更好地解决各种复杂环境下的组网任务具有重要的理论和实际意义[5]。
2 无线Mesh网络
无线 Mesh 网络将无线局域网和移动自组网相结合,是一种全新的网络架构,代表了无线自组网技术的发展方向,近几年得到了人们的广泛关注。无线 Mesh 网络是低功率的多级跳点网络,它是把信息从一个节点传递到另一个节点,直到信息到达目的地。对于点对点的网络,节点会自动过滤信号只接收自己需要的信息,而网状网络的节点接收到要传给其他节点的信息时,会像中继一样把它们再次传送出去[6]。

图1 Mesh网络示意图
因此每个无线 Mesh网络的节点可以作为接入终端,也具有路由和信息转发的功能,具有极高的组网自由度。无线 Mesh 网络还提供从源节点到目的地的多条冗余通信路径。如果一条路径由于故障或干扰而停止工作,网络会自动改变传输的路径,使信息通过其他路径传输[7]。
Mesh网络的自组网协议是针对硬件资源条件苛刻的移动自组网设计的,适用于移动速度快、拓扑结构变化快的无线网络,有对网络拓扑结构的变化敏感、网络吞吐量高等优势[8]。
3 定位系统设计
室内定位系统需要感知人员的实时位置,这不仅要通信距离远、速度快,网络的拓扑结构也经常改变,属于比较苛刻的移动自组织网络[9]。
传统的室内定位网络需要提前布点或利用有线网络。本文要解决的关键问题就是如何建立灵活的无线定位网络。采用Mesh 路由协议就可以充分利用网络资源、平衡网络负载、改善通信性能、避免网络震荡[10],以适应室内定位系统这样快速变化的网络拓扑结构,并且有强大的功能和很好的可扩展性,方便在网络中增加定位的人数。
本定位系统主要用于复杂密闭环境下室内人员实时定位问题,尤其是在无法传输无线信号的地下矿井或车库里,面对地震火灾等突发情况,不需要提前布置网关,也不用借助有线网络,定位系统组网快速灵活,解决了当今的定位系统成本高、速度慢等问题,有很大的实用价值。
3.1 定位系统的整体结构设计
本室内定位系统由定位终端节点、中继器、集中器和上位机电脑组成,是一个以上位机为中心,定位终端和中继器为节点的星形网络。定位终端节点需要佩戴在人员腰部,负责采集数据和处理数据,并将解算后的位置信息通过无线发送至中继或者上位机电脑。中继器和集中器的作用是将上位机的命令传输给定位终端节点以及将定位节点采集的数据返回给上位机。上位机会依次发送指令给定位节点,节点接收到指令便发送解算后的数据,没有收到指令的节点处于等待状态,上位机收到各组数据后在界面上显示每个定位人员的轨迹和位置。系统的整体结构如图2所示。
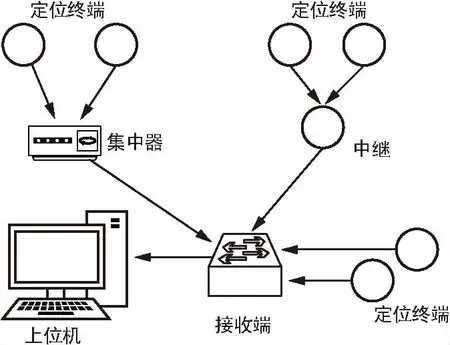
图2 室内定位系统整体结构图
3.2 定位节点的硬件设计
定位终端节点包含感知人员位置和姿态等信息的传感器模块。微处理器选用ST公司的基于ARM Cortex-M3内核的STM32系列,该处理器指令丰富,提供了JTAG接口用于程序的下载与调试,还包含了大量的I/O接口,方便上位机读取串口数据,具有高性能、易于开发、实时性强等特点。MEMS加速度计使用Murata公司所生产的SCC2230-E02,能同时采集3个轴向的加速度值,稳定性较好,可靠性高。本文选用的磁力计型号为SMAG3,具有广泛的测量范围。能够完全满足定位系统的需求。无线通信模块选用的是基于SX1278芯片的低功率433 MHz无线Mesh组网模块,由标准供电电源DC 5V/0.5A供电。定位终端节点硬件结构如图3所示。

图3 定位终端硬件结构框图
中继和集中器也使用和定位终端相同的Mesh组网模块。接收端同样使用该Mesh组网模块,并通过USB接口连接上位机PC,接收定位终端、中继和集中器发出的数据,这些数据经过上位机解算后显示在界面上。
3.3 系统软件设计
根据功能的不同,系统软件设计主要分为定位节点和上位机界面的程序设计。系统软件设计的开发平台选用Keil μVision5。终端节点的作用主要是进行数据的采集和传输。设备上电后,首先采集陀螺仪、加速度计和磁力计的原始数据,并对采集的传感器数据进行预处理,再通过数据融合、滤波等方法解算节点的姿态信息,得到目标节点的航向,最后通过航位推算得到节点当前的位置信息,最终实现定位节点位置信息的确定。位置信息推算流程如图4所示。解算出来的信息由通信模块发送。

图4 位置信息确定流程图
本系统采用Mesh网络的轻量动态多径路由协议,该路由协议可以最大限度减小路由建立和维护过程的开销,能够在多条路径并行进行数据传输。将上位机接收端的模块设置为Master模式,而其他模块为Slave模式,网络拓扑结构为星形网。上位机通过轮询的方式与定位节点之间进行无线传输。发送的数据格式包括6个8位数据,从高位到低位依次是:x轴数据、y轴数据、z轴数据、高度、航向和姿态,最后是校验位。具体方法为:上位机依次向定位终端发送指令,接收到指令的定位终端便向上位机返回解算的数据,其他终端处于等待状态。如果定位终端无法发送数据给上位机,就先发送给中继器或集中器,由中继器转发给上位机。
将每个无线中继器和集中器节点的通信模块配置成自组网模式,中继器接收到上位机或定位终端发送的数据后再次转发,利用模块的自动路由功能就能实现中继功能。在密闭空间或距离较远的情况下,上位机和定位终端无法直接通信,中继器位于两者的通信范围之内,就可以完成节点与上位机间信息的相互传输。
上位机界面的创建利用专业的三维实体模型软件Unity 3D,模型可以快速地创建、修改、导出和渲染。首先收集整理建筑物的设计图纸、照片等,利用PS等软件处理,以满足建模要求,再利用Unity 3D进行模型创建并优化,提高逼真度,达到建筑物真实的效果。上位机界面也会依靠无线Mesh模块向外发送指令,当接收到定位终端返回的数据后,界面将数据解算成图上的轨迹,这样就显示了定位人员走过的路线和当前的位置,而界面上的窗口还可以直接显示其坐标,外部人员就可以得知定位人员的位置姿态等信息了。上位机轨迹图如图5所示。

图5 上位机轨迹图
4 系统性能验证
系统搭建完成后,对定位系统性能进行实际测试。系统性能测试的地点在教学楼内,选取初始位置的坐标为(0,0,0),定位人员在腰部佩戴定位终端,上位机将获取人员行走的轨迹和位置。
本次实验测得1跳通信延迟约为90 ms,2跳通信延迟约为196 ms,从而能够满足人员的实时定位。定位人员在教学楼内随意行走约2 min后回到初始位置,得到坐标数据(x,y,z)。相对误差为:

平均误差为:
采集10组坐标数据并计算相对误差,如表1所示。
表1 定位系统坐标统计

次数初始坐标结果相对误差12345678910(0,0,0)(0,0,0)(0,0,0)(0,0,0)(0,0,0)(0,0,0)(0,0,0)(0,0,0)(0,0,0)(0,0,0)(0.6,0.4,0.1)(0.5,0.4,0)(0.2,0.6,0.2)(0.8,0.5,0.2)(0.5,0.5,0.1)(0.1,0.8,0)(0.5,0.6,0.1)(0.7,0.5,0.3)(0.3,1.0,0.2)(0.6,0.4,0.1)0.230.640.660.960.710.80.790.911.060.73
表2 无线Mesh网络带宽

测试项距离/m带宽/Mbit·s-1延时/s点对点点对点点对点2跳通信3跳通信4跳通信10020030060090012001.11.01.01.01.21.10.380.640.981.962.743.71
通过测试实验,可以看出基于Mesh的无线自组网技术能够较好地运用到室内定位系统中。该定位系统能够实时准确地获取各个区域内人员的位置姿态等信息,及时地传输到上位机界面上,外部的人员可以准确掌握室内人员的位置和运动轨迹。如果发生危险,也方便救援人员能够及时到达事发地点进行抢险。同时,在一般的生产中也方便管理人员进行调度和分配,提高生产与管理效率。
5 结束语
本文对当今存在的多种无线传感自组网技术进行了分析,通过结合无线Mesh网络的优点,研究并运用了一种基于无线Mesh网络与惯性传感器的自组网技术,设计了完整的星型多路径人员定位系统。通过理论分析和实验得到的数据可知:该系统实现了室内人员定位系统的基本功能,能够在上位机界面上实时显示室内人员的位置和姿态等信息,可以灵活改变定位网络的结构和区域。与传统室内定位系统相比,在组网的操作性、成本、稳定性等方面具有较大的优势。未来还可以实现多种通信方式混合组网,实现高精度“全覆盖”的定位网络。
[1] 肖永.消防单兵室内火场无线定位系统[J].电子世界,2014,6(5):26-29.
[2] 孟祥瑞,徐雪战,赵光明.基于三维可视化与ZigBee技术的真三维煤矿人员定位[J].煤炭学报,2014,39(2):603-608.
[3] 肖永健.基于WSN与惯性导航的井下人员定位系统设计与应用[D].武汉:华中科技大学,2014.
[4] 秦裕斌,陈建华,黄晓.无线Mesh网络技术及其运用[J].通信技术,2009,12(24):144-146.
[5] 袁狄平,李牧,李智慧.基于惯性导航技术的消防员室内定位技术[J].消防科学与技术,2014,6(12):66-74.
[6] 张兴伟.基于WSN的温室环境检测系统研究与设计[J].光学精密工程,2014,20(6):1201-1207.
[7] 钱志鸿.面向物联网的无线传感器网络综述[J].电子与信息学报,2013,22(10):236-241.
[8] 张锋辉.无线传感器网络粮情检测组网研究[J].北京邮电大学学报,2010,23(5):1326-1350.
[9] 赵庆川.基于无线Mesh网络的瓦斯监测节点设计[J].煤矿学报,2016,47(10):101-104.
[10] 林砺宗,王子异,刘磊.基于Ad Hoc无线自组网测量系统组网技术研究[J].计算机工程,2007,33(1):253-255.
[11] 宋丹丹.无线工业遥控器的研究与设计[J].光学精密工程,2010,20(6):1201-1207.
[12] 余向阳.一种无线传感器网络自组网协议的研究与实现[J].合肥工业大学学报,2009,19(12):521-536.
[13] 颜丙洋.基于433MHz模块的远程抄表安全系统设计与实现[D].山东:山东师范大学,2013.
[14] 郭斌.基于230MHz无线自组网的电力信息采集系统研究[D].天津:天津大学,2014.
[15] 王晓峰,张扬.230MHz无线专用网扩容及自组网技术研究[J].电力需求侧管理,2009 (9): 34-38.

刘宇(1972―),男,教授,硕士生导师,主要研究方向:固态振动陀螺和光电传感技术;
刘多纳(1992―),男,硕士研究生,主要研究方向:无线传感器网络;
杨晓辉(1994―),男,硕士研究生,主要研究方向:传感器件与系统;
杨磊(1992―),男,硕士研究生,主要研究方向:传感器件。
