智能婴儿防盗摇床
2018-12-29
(天津农学院 工程技术学院,天津 300384)
0 引言
据医疗卫生部门的报告显示,每年在产科病房婴儿错抱和被盗事件估计为2万次[1],而这仅仅只是关于在医院丢失婴儿的估计,对于在其他场合下婴儿被盗的情况更是数不胜数。针对婴儿被盗的问题,有人研制出了基于RFID射频识别技术的婴儿智能防盗系统用于婴儿防盗[2,3],但这个系统的针对性太强,只适合于医院和家庭等固定场所使用,而且受到监控距离的限制。而为了解决这个问题,我们设计了一款不受地点及距离限制的智能婴儿防盗摇床。
1 整体方案设计
当开启安全开关后,若婴儿被人抱起,则悬臂梁称重传感器检测不到婴儿的体重,摇床就会立刻发出警报,并通过拨打监护人的电话进行求救。若有人试图连婴儿带摇床一起抬走,则超声波模块会以每3秒钟一次的频率自动检测摇床与地面间的距离是否超过“安全距离”,而摇床在搬动过程中势必会被抬起,因此必然会触发“警报”,其“警报”包括蜂鸣器响和拨打监护人的电话。这款防盗婴儿摇床便是以此来实现婴儿防盗及其婴儿床防盗的目的。同时为了区分报警原因,DS12864的液晶显示屏会将报警原因显示出来。
2 关键部件设计
2.1 称重传感机构的机械设计
该装置的局部机械结构图如图2所示。
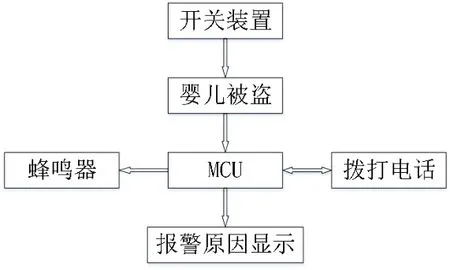
图1 整体思路流程图
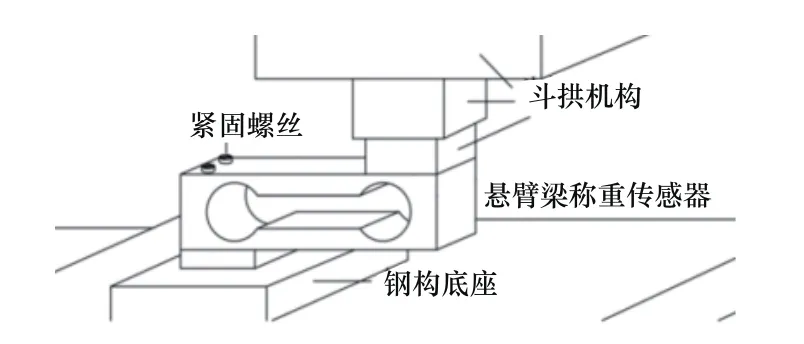
图2 称重传感机构的局部结构
如图2所示,通过使用紧固螺丝将悬臂梁称重传感器[4]的左端固定在中碳钢[5]钢构底座上,而右端同样使用紧固螺丝将斗拱机构固定在悬臂梁称重传感器上,其中钢构底座和斗拱机构与悬臂梁称重传感器接触的部分均采用硬度较大的淬火中碳钢[5]以防止其在受力的过程中产生形变,而影响测量数据的准确性。
如图3所示,图为称重装置的整体结构图,与局部机械结构图相对应,整体结构从上往下依次为负荷顶层、斗拱机构、悬臂梁称重传感器、钢构底座及其阶基层。其中悬臂梁称重传感器的型号为AMI-50,其测量范围是0~50kg,精度可以达到5g。
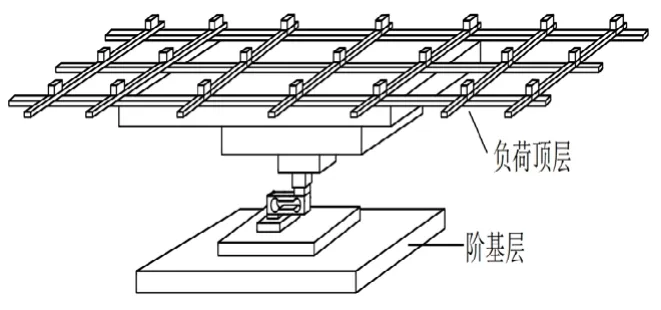
图3 称重传感机构的整体结构图
2.1.1 悬臂梁称重传感器工作原理
由于称重传感器中电阻应变式压力传感器稳定性较好,精度和灵敏度较高,寿命较长,对测量环境要求不太严格,因此我们选用电阻应变式传感器作为电子称传感器。利用电阻应变片搭建两路桥式电路,当传感器的外形受力变化时,电阻应变片阻值便会发生相应的变化,通过的电流变化发生相应的变化,利用HX711 24路高精度AD芯片将阻值变化采集,并将该数值显示在显示器12864上。将得到的数据利用MATLAB进行函数耦合,最终可将宝宝体重准确的显示在12864上。
2.1.2 悬臂梁称重传感器测量原理
当垂直正压力P作用于梁上时,梁产生形变,电阻应变片Rd、Rb受压弯拉伸,阻值增加;Ra、Rc受压缩,阻值减小。电桥失去平衡,产生不平衡电压,不平衡电压与作用在传感器上的载菏P成正比,从而将非电量转化成电量输出。
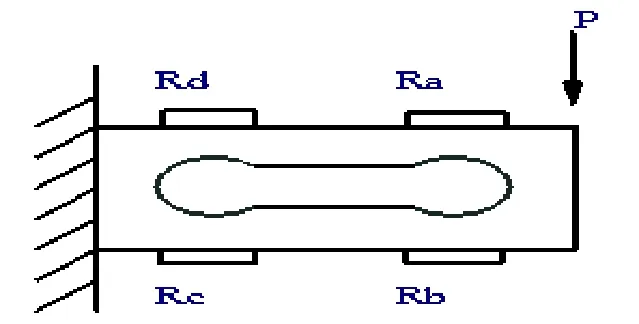
图4 电阻应变式传感器测量原理
电阻Ra、Rb、Rc和Rd组成惠更斯电桥,将两对电阻应变片的阻值变化转变成输出电压,其工作原理如图5所示。
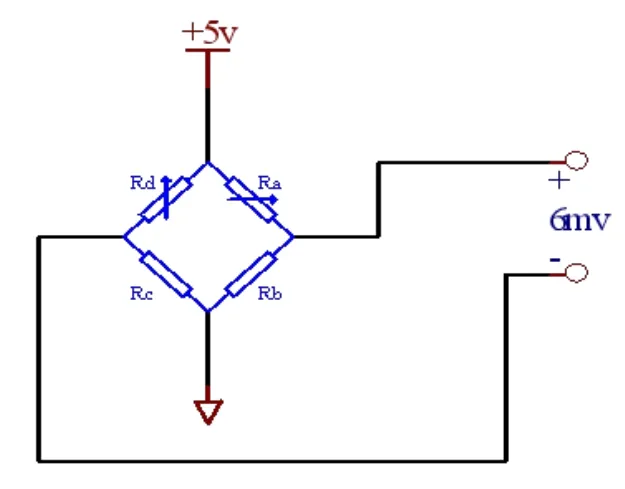
图5 桥式电路
2.2 秤重数模转换芯片HX711
HX711使用内部时钟振荡器(XI=0),输出数据速率(RATE=0)10Hz。电源直接取用与MCU芯片相同的供电电源。通道A与传感器相连,通道B通过片外分压电阻与电池相连,用于检测电池电压。输出脚D_OUT接单片机的P3^0口,PD_SCK接P3^1口。
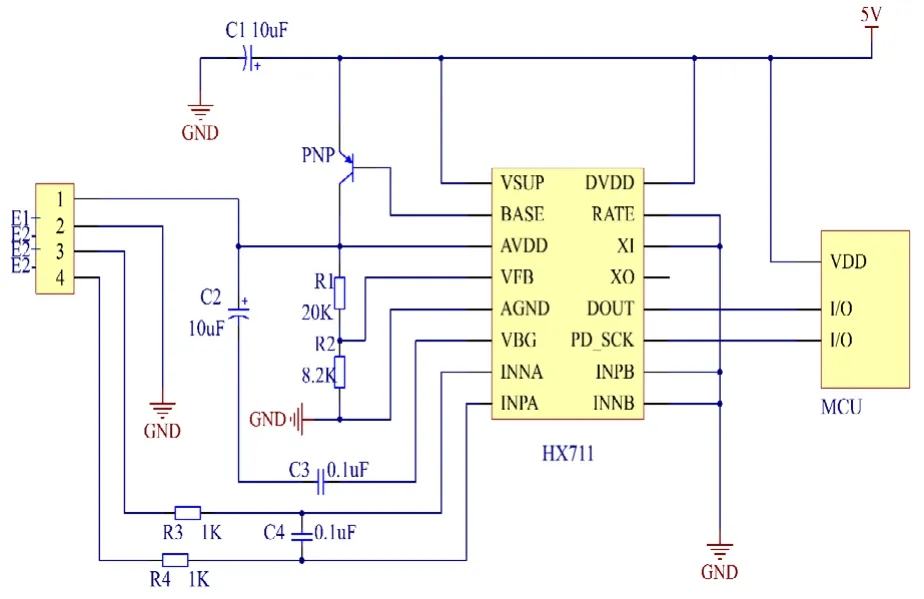
图6 称重传感器电路设计
2.3 超声波模块
2.3.1 工作原理
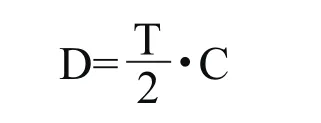
如图7所示,超生波测距是发射器发射出长约6mm,频率为40kHz的超声波信号。此信号被物体反射回来由接收头接收,接收头实质上是一种压电效应的换能器。它接收到信号后产生mV级的微弱电压信号。设超声波脉冲由传感器发出到接收所经历的时间为
T,超声波在空气中的传播速度为C,则从传感器到目标物体的距离D可用下式求出:
2.3.2 超声波电路设计
HC_SR04的VCC接5V电源,GND为地线,Tring触发控制信号输入接单片机的P1^0口,Echo回响信号输出接单片机的P3^2口。Tring首先发射至少10um的高脉冲到单片机,单片机自动发送8个40kHz的方波,经过PNP的放大并由MAX232转换传递给发射器,自动检测是否有信号返回,若有信号返回,接收器接受信号经过TL047运算放大器将信号传递给单片机,Echo输出高电平回响信号。通过发射信号到收到回响信号时间间隔可以计算距离。
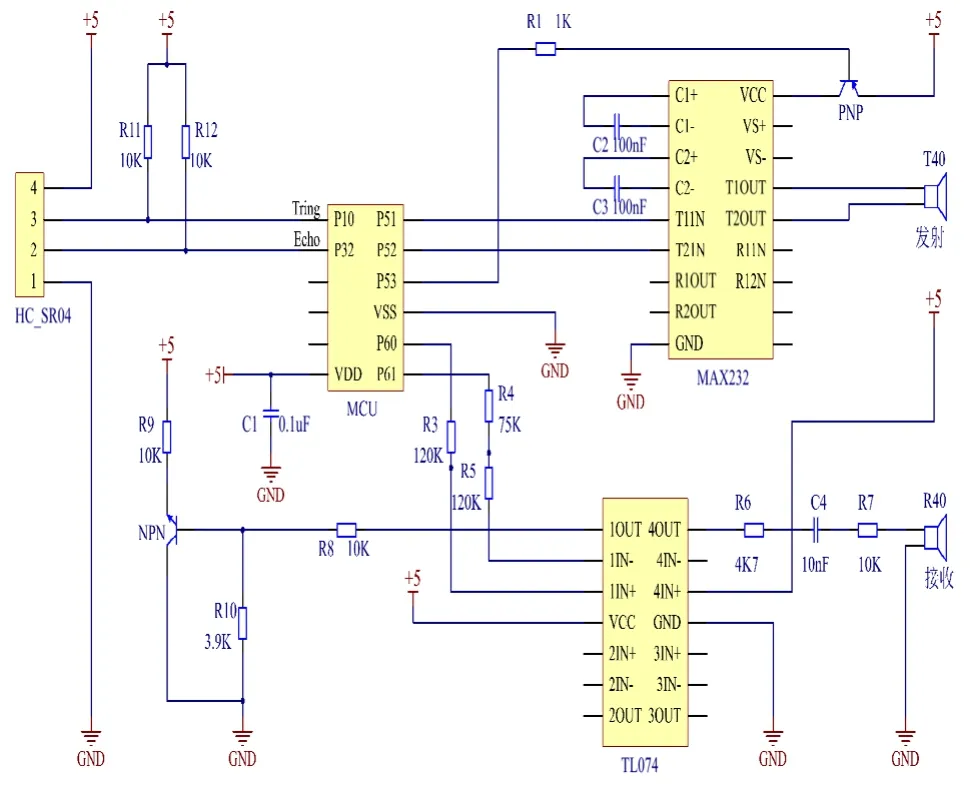
图8 超声波测距电路图
2.4 手机报警模块
2.4.1 工作原理
手机报警模块由GSM模块、MAX232芯片、SIM卡、HX711芯片等组成。通过单片机控制报警过程,MAX232芯片用于信号传输中的电平转换,HX711芯片用于将婴儿被盗后,悬臂梁称重传感器上的电平变化模拟量转换为数字量,并传送给单片机,由单片机对该数据进行处理,然后将数据传递到GSM模块,利用GSM模块中的GPRS网络与手机通信,以达到及时拨打电话报警的目的。
2.4.2 手机报警模块电路设计
如图9所示为GSM模块电路,我们选用GSM模块中的DIM900A与单片机的串口相连,由于电平不一致,单片机的数据发送串口TXD通过MAX232芯片经过电平转换与GSM模块的RXD相连,数据接收串口RXD通过MAX232芯片经过电平转换与GSM模块的TXD相连,并且共地,这样就可以进行通信。当婴儿及婴儿床发生被盗时,单片机会立刻把信号传递给GSM模块,通过GPRS网络拨打监护人电话报警,从而实现防盗功能。
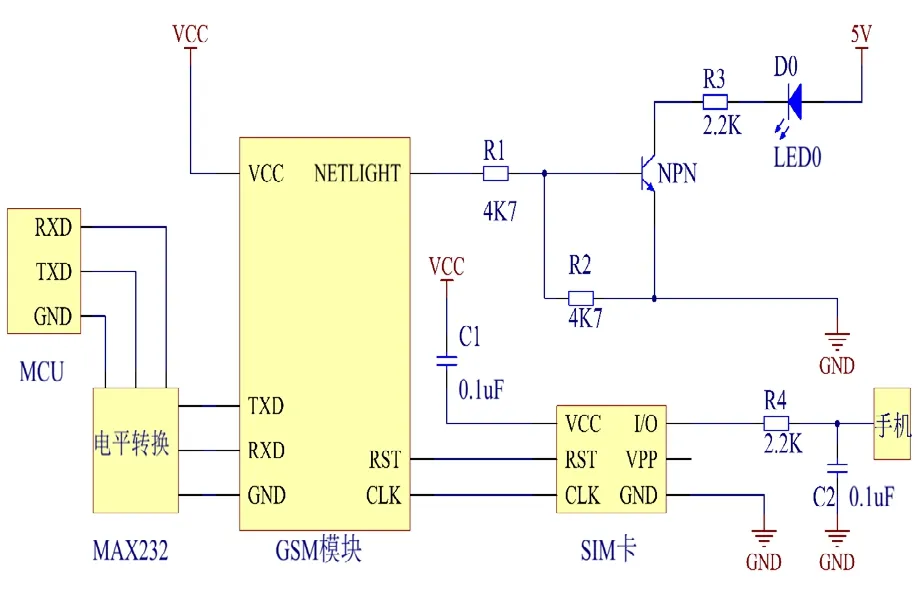
图9 GSM模块电路
3 性能实验
3.1 称重传感机构测试
在称重传感机构的机械安装结束之后,为了检测其测量的精确性,做了如下实验:
将安装完成的称重传感机构平放在试验台上,取三整盒标定砝码,砝码最小值为0.05kg,每次以0.05kg为增量,直至增加到1.25kg。为减少不必要的实验数据,我们以第一次测得的0.05kg为基准数值,以0.15kg为最小样本进行系统抽样。经过统计拟合得到如下标定数据表及拟合曲线。
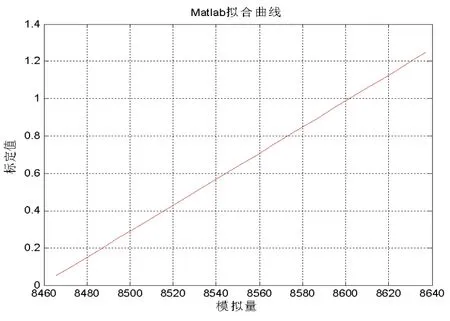
图10 压力传感器拟合曲线
由图10称重传感机构其精确性的拟合曲线可以看出:该称重传感机构的精确性很高,在砝码标定值0.05kg~1.25kg的范围内呈线性变化。尽管该传感机构自身的重量达到10kg,但是我们选用的悬臂梁称重传感器其可测范围是0~50kg,即使除去自身重量,依然有0~40kg的测量能力,而本款摇床适用于0~12个月的婴儿[6],12个月大的婴儿体重一般不会超过20kg,因此依照实验结果来看,该机构的测量精度很高,十分灵敏。

表1 标定数据表
3.2 婴儿防盗性能测试
在完成机械组装及其程序调试后,用一个8个月大的婴儿[6]模型,模拟婴儿被盗的情景,同时用秒表计时,测量从婴儿被盗(被抱起)到监护人接到“报警”电话之间的时长,以此来检测该婴儿防盗摇床的防盗性能。
表2为实验数据。
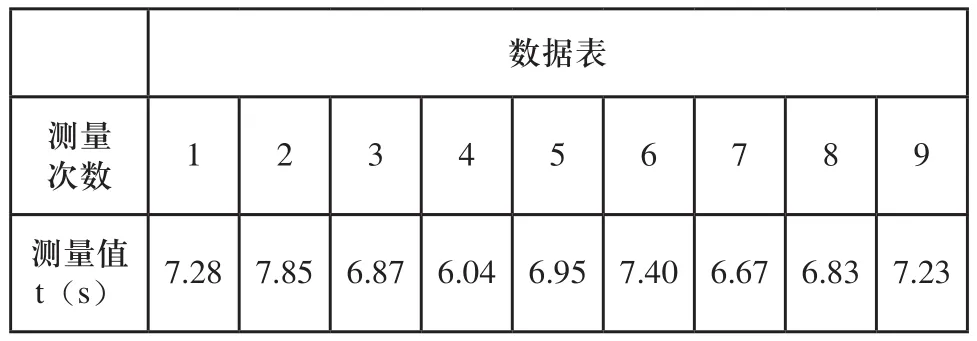
表2 防盗性能数据
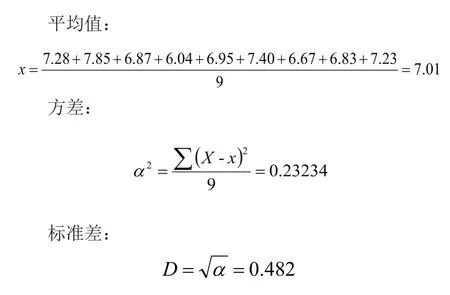
由婴儿防盗性能测试的实验结果我们可以看出:从婴儿被盗(被抱起)到监护人接到“报警”电话,平均时长7.01s,其标准差值没有超过0.5s。在这9组实验数据中最大时长为7.85s,最短时长为6.04s,与我们平时拨打电话到接到电话的时长相近,因此证明该摇床的婴儿防盗性能优良。
3.3 婴儿摇床防盗性能测试
开启安全开关,设定摇床与地面间的“安全距离”为8cm,由两个人将摇床抬起,并由第三个人记录从摇床抬起到蜂鸣器响之间的时长t1和从摇床抬起到接到报警电话之间的时长t2,共测量9次得到如下数据。
如下为实验数据及其平均值、方差、标准差。
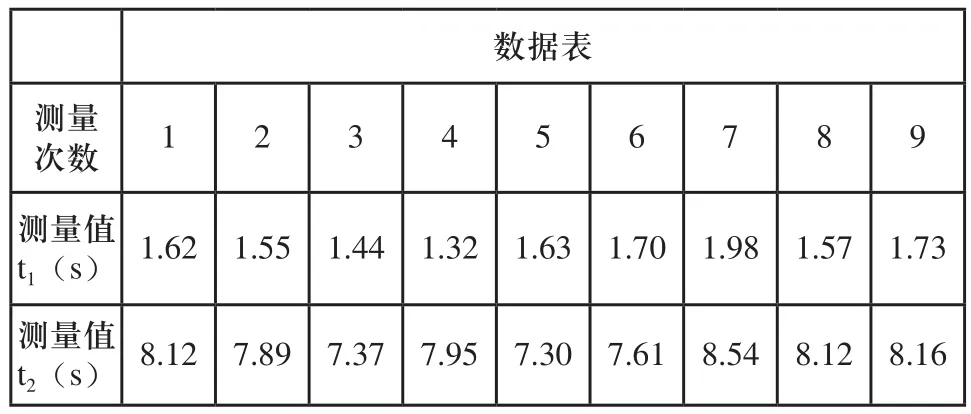
表3 摇床防盗性能数据
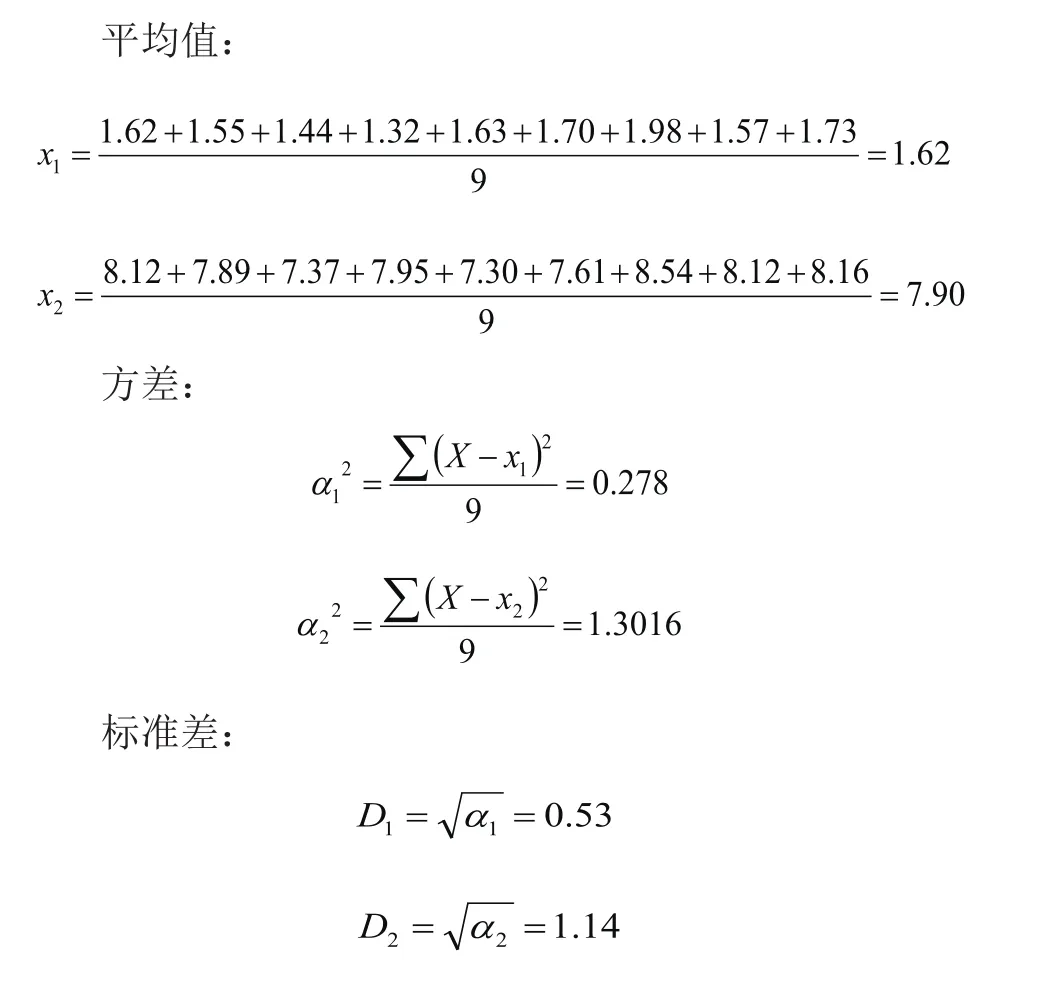
由婴儿摇床防盗性能测试的实验结果得到:从婴儿摇床被抬起到蜂鸣器响,平均时长1.62s,标准差值0.53s,实验数据中最大时长为1.98s,最短时长为1.32s,证明该系统十分灵敏;而监护人接到“报警”电话,平均时长7.90s,其标准差值没有超过1.2s。实验数据中最大时长为8.54s,最短时长为7.30s,与婴儿被抱起到监护人接到“报警”电话时长差值不超过1.5s,仍旧与我们平时拨打电话到接到电话的时长相近,因此证明该摇床的防盗性能优良。
4 结论
防盗婴儿摇床的研发设计涉及到电子、机械以及自动控制等多个领域,是一个综合性的应用研究课题。我们着重以确保婴儿安全为前提,设计了具有防盗功能的婴儿摇床,通过具有针对性的实验测试:从婴儿被盗到监护人接到报警电话,中间时长不超过8秒。其结果证明本款智能防盗婴儿摇床具有较高的可靠性,防盗性能优良。而且该摇床的防盗系统由我们自主研发设计成本较低,易于维护和扩展,并且可扩展至其他领域,其前景广阔,具有产品化意义。