高速滑轨工程轨道测量方案设计及关键设备选择
2018-12-27张伟靖黄立喜梅小飞
张伟靖 孙 宁 黄立喜 梅小飞
(63870部队,陕西 华阴 714200)
1 概述
高速滑轨车借助与扣合在轨头上的滑靴沿着轨道高速运动,粗糙的轨道不仅会在滑车产生巨大的震动,而且当轿车质量较大,速度很高时,还可能发生损坏轨道,滑车的脱轨等安全问题。研究指出,当某处轨道实际位置与理论值的误差每增加0.2 mm,滑车运动时震动载荷将增加30%,因而高速滑轨道的高平直度是保证滑车能高速平稳运行的必需条件,保证高平直度的方法是对轨道进行精密调整。
2 测量原理
2.1 主轨测量原理
主轨调直就是对主轨进行高低和横向调整,测量需得到每一个固定点的高低和横向调整量。其思路是:以相邻两个基准点构造空间基准直线,经过基准线构造空间水平面和垂直面,得到轨上每个点的空间坐标,由于两点与两平面的位置关系得到点于水平面和垂直面的距离,将此距离值与设计值进行运算比较,得到主轨相对基准线的高低和左右偏差值,作为轨道调整的参数。
2.2 副轨测量原理
副轨测量是在主轨调直的基础上进行,采用的轨检尺技术已在铁路上广泛采用,比较成熟,本文不再探讨。
3 测量方案设计及设备选择
对主轨的测量,激光跟踪仪和全站仪从原理上都可实现,但其测量精度、操作方便性和价格等相差较大,下面主要从设备的测量原理、测量方法、测量精度和操作方便性等方面对激光跟踪仪和全站仪进行比较。
3.1 激光跟踪仪
激光跟踪仪是建立在激光技术和自动控制及技术基础上的一种新型空间坐标测量系统。它采用极坐标法原理进行三维测量,通过测量目标的水平角、垂直角及斜距,建立以测站为中心的坐标系。
激光跟踪仪仪器坐标系是以跟踪头中心为原点,以度盘上的0读数方向为X轴,以度盘的法线向上的方向为Z轴,以右手坐标系确定Y轴,如此建立起仪器坐标系。当反射器在空间移动时,仪器会自动跟踪,同时记录干涉测距值D及水平度盘上和垂直度盘上的角度数值Hz,Vt,用这三个观测值,按下式就可得到点仪器坐标系中的空间三维直角坐标x,y,z。
x=D·sinVt·cosHz,
y=D·sinVt·sinHz,
z=D·cosVt。
3.1.1测量方案设计
将激光跟踪仪器置于两轨之间,前后位置在两相邻基准桩之间,将激光反射靶球分别置于两个基准桩上,在仪器坐标系中,先测量两个基准桩顶的坐标,在软件中对两个桩顶坐标进行修正得到两个理论基准点,用两个理论点构造直线,此直线与理想的空间基准线重合。用软件生成过直线的水平面和垂直面,将靶球置于钢轨中心线上依次取点,得到一个扣件位置的坐标。在软件中测得扣件位置与两个面的距离。将两个距离与主轨和基准线两个方向分量的设计距离值相减,得到调轨用的横向偏差和竖向偏差。
3.1.2测量精度分析
根据激光跟踪仪的测量原理,在仪器坐标系中,每一个测点的三维坐标由仪器坐标原点到测点的斜距和两个夹角通过坐标换算而来,其关系式如下式:
x=D·sinβ·sinα,
y=D·sinβ·cosα,
z=D·cosβ。
在已知激光跟踪仪的测距精度和测角精度的情况如下,根据误差传播定律,其测量坐标的最大允许误差为:
下面以目前市场上主流产品徕卡AT401型激光跟踪仪为例,计算其利用于轨道测量时的三维坐标测量的精度。其测角精度为0.5″,测距精度为15 μm+6 μm/m。
在两端最远处,斜距D约为31 m,测距最大允许误差MD为0.20 mm,水平角α约为76°,垂直角β约为89°,x坐标的测量最大允许误差。
y坐标的测量最大允许误差:
z坐标的测量最大允许误差:
从以上计算可得出,X方向的测量误差最大,它是沿轨道方向的,不参与调轨,其余两个方向的最大误差不超过0.09 mm,以上计算的条件是指距离远,角度最大,设备测量误差最大时得到的。当测点离仪器越近时,测量误差会减小,如果再考虑工装卡具、气象等影响,其误差不会超过0.1 mm是满足测量精度要求的。
3.2 全站仪
全站仪是集测距、测角和微处理等技术、能够自动测量目标点与全站仪的水平角、垂直角、斜距,并且能计算它们之间水平距离、高差、坐标增量,同时可自动显示、记录、存储和数据输出。它建立坐标系的方法与激光跟踪仪类似,以为自己坐标原点建立独立的极坐标或三维坐标系。新型的全站仪具有能自动识别反射棱镜目标点和快速跟踪功能。
3.2.1测量方案设计
同激光跟踪仪。
3.2.2测量精度分析
以目前市场精度最高的徕卡TS30型全站仪为例,对三维坐标测量精度进行计算。其测角精度为0.5,测距精度为0.6 mm+1 μm/m。
相同条件下,x坐标的测量最大允许误差:
y坐标的测量最大允许误差:
z坐标的测量最大允许误差:
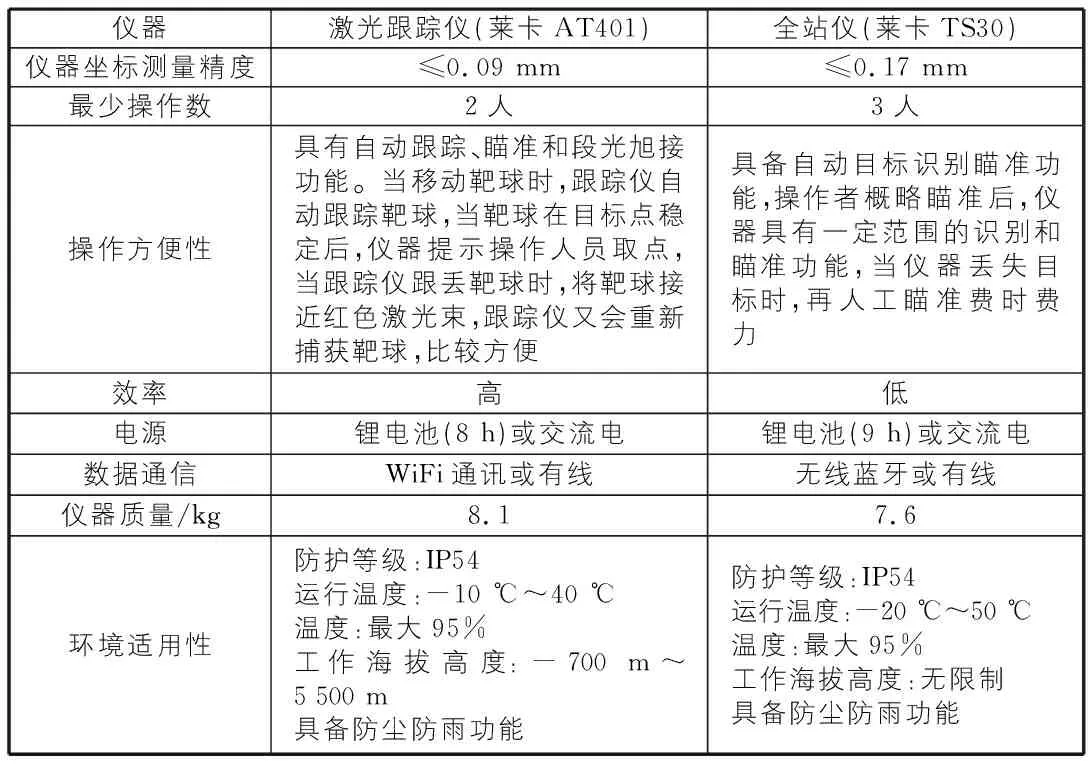
表1 两种仪器比较
从以上计算可得出,y,z坐标测量误差最大为0.17 mm,如果再考虑其他的影响因素,如反射棱镜误差,连接工装的误差,环境影响等因素,其误差已接近轨道的测量指标值0.02 mm。
3.3 技术特点对比
两种仪器比较,见表1。从表1对比可得出,激光跟踪仪的测量精度、操作方便性、效率等优先于全站仪,其他方面性能基本相当。我们多次与专业技术人员进行讨论,并进行了实物验证。方案的可行性、操作的方便性、精度分析计算方法和结果得到了验证和确认。综合考虑,认为激光跟踪仪更适合于轨道测量。
4 结语
本文针对高速滑轨工程轨道的结构、特点和指标,在全面研究大空间精密测量技术和设备的基础上,对相关设备进行了详细地分析对比,设计了科学合理的测量方案,选择了合适的设备,本文所做的工作将为轨道测量的工程实施提供充分的技术支持。
