机载激光雷达点云密度特征应用现状及进展
2018-12-26赖旭东刘雨杉李咏旭武汉大学遥感信息工程学院湖北武汉40079地理国情监测国家测绘地理信息局重点实验室湖北武汉40079湖北锐捷信息集成有限公司湖北武汉4004
赖旭东,刘雨杉,李咏旭,祝 勇(.武汉大学遥感信息工程学院,湖北 武汉 40079;2.地理国情监测国家测绘地理信息局重点实验室,湖北 武汉 40079;.湖北锐捷信息集成有限公司,湖北 武汉 4004)
密度是机载激光雷达点云数据的重要属性,反映了激光脚点空间分布的特点及密集程度,而激光脚点的空间分布直接反映了地物的空间分布状态和特点。一般认为,点云密度的作用类似遥感影像的分辨率,点云密度越大,则能探测更微小目标。LiDAR设备生产商常以能获取更高密度的点云数据来体现其新型号设备的先进性;LiDAR数据获取也以点云密度为主要指标,围绕密度指标来设置航高、发射频率、扫描角度以及带宽等参数;评价数据质量时也常常将点云密度作为重要指标。例如,在测绘行业规范中规定,只有达到了相应点云密度才能生产对应比例尺的产品,很多LiDAR数据处理算法也对点云密度有要求。可见点云密度涉及了LiDAR技术的硬件制造、数据采集和数据处理及应用的整个链条,是LiDAR技术的关键指标。本文从应用实践出发,归纳和探讨了目前LiDAR点云密度的应用现状及主要问题,并对其应用能力及处理方法进行了研究。
1 点云密度应用现状及主要问题
随着波形数据采集仪、多波束(MPIA)技术、多频率技术、多激光扫描头等软硬件技术的出现,以及激光发射频率的快速提高,LiDAR点云密集程度一直在提高,不断推动LiDAR技术的应用。以前在稀疏数据中无法体现的特征和规律,在当前点云密集分布的状态下,已经被清晰地展现出来。众多学者对点云密度的理论及应用做了实验和分析,这是点云密度特征研究的基础。
1.1 点云密度表征
绝大多数研究都默认将点云数据投影在XY平面,然后使用平面点的密度值作为点云密度的表征,这类研究比较少。Shih等指出,可以用不同的方式来表征激光脚点密度,建议将测区划分为小的单元格,将单元格内的点数与单元格的面积的比值作为密度的表征[1]。这种方法细分了点云密度的表示,可以表示某一局部的点云密度,使这些单元格之间可以进行密度比较和运算。
对点云数据的三维空间密度特征进行表达,应该能够对单个脚点的密度值进行计算,并通过对密度值的统计分析,准确描述点云数据的空间分布状态。尤其是得到目标点一定邻域范围内脚点分布状态和特点,以便将其与地物的空间分布进行关联、对比,找出其对应关系,基于先验知识利用这种关系进行数据分析和处理。由于空间密度的度量与空间区域尺度密切相关,只有在明确的尺度下讨论密度才有意义。
1.2 点云密度与数据质量的关系及对产品质量的影响
庞勇等研究了点云密度对林分高度反演的影响,发现不同密度点云数据反演的结果差异不大,高密度的点云可以进行更小尺度的林分平均高的估计和单木树高的估计[2]。Strunk等研究了点云密度对利用模型辅助方法评估森林调查变量的影响,指出不同点云密度对模型精度的影响差异不大[3]。Singh等研究了点云密度对城市森林生物量估算的影响,结论是降低点云密度是在不影响生物量估算精度的情况下进行森林资源调查的可行性方案[4]。魏舟等研究了密度不同的点云数据对地表曲率、坡向、地表糙度3种直观指标的不同影响,结论是使用不同密度点云对地表起伏较大的地形曲率影响更为明显,对于起伏较小的地形则影响不明显;对坡向变化影响不明显;对地表糙度的影响比较复杂[5]。王萍等研究了不同点云密度作业模式下电力巡线的差异,指出点云密度在一定范围时,不仅能提取电力巡线及电力线和杆塔信息,还能有效提高数据采集效率,降低数据处理及存储成本[6]。
1.3 使用密度特征去除噪声
在三维激光扫描仪数据采集的过程中,会出现由环境等因素产生的噪声数据。由于噪声出现的概率较小,则假定其所在区域是点云密度较低的区域,可以找出低密度区域,将其作为噪声去除[7-10]。通常利用聚类的思想将原始点云数据中密度相连的点聚集为簇集合,用以区分正常点云与异常噪声[11-14]。这类研究比较好地应用了点云密度的三维特征,一般是将空间区域划分为三维的立方体,通过计算立方体中点的个数来表征点云密度。
1.4 在LiDAR数据分类中的应用
通过密度特征辅助进行LiDAR数据的分类,提供专题信息。Sithole等简单探讨了点云密度对滤波会产生影响,但是没有深入研究[15]。Balsa-Barreiro等指出不同地类覆盖点云密度的不同,这是使用密度特征进行目标分割的基础[16]。Chu及Liu等利用点云密度指数及其他特征成功检测并提取了滑坡[17-18]。Worstell等使用点云密度信息进行了识别水体的研究[19]。Shi等使用密度信息对车载点云数据进行了目标分割[20]。李乐林等通过建筑物和树木区域多次回波点云在区域密度上的巨大差异来识别建筑物点云和树木点云[21]。王果等提出了考虑局部点云密度的自适应建筑立面分割方法,将局部点云密度作为点云分割的一个因素。这些方法都是将点云密度特征作为目标识别的判断依据,通过对密度的分割完成了点云的分割[22]。
综上所述,点云密度特征能够准确反映目标空间分布的状态,可以广泛应用于LiDAR数据处理与应用中,但是现有研究及应用大多基于平面密度进行分析,不能充分反映三维点云的真实密度特征。目前的实践研究还没有建立三维空间描述的点云密度特征与地物空间分布特征之间的对应规律,应用实践中对密度特征的理解和使用比较简单。
2 不同密度点云数据DEM生产能力研究
LiDAR数据是目前生产DEM的重要数据源,点云数据密度对生产的DEM产品质量有重要的影响。理论上,密集点云数据对地形细节的表达会更好,生产出的DEM产品质量会更高,稀疏点云数据生产的DEM产品质量会相对较差。因此,生产高质量DEM产品需要点云数据满足相应的密度要求。然而,点云密度并非越高越好,高密度点云数据增加了数据获取的经济和时间成本,对数据存储和数据处理的要求也更高。
有学者针对点云密度与DEM产品质量间的关系展开了研究。Anderson等通过对比不同点云密度数据生产的DEM产品精度,指出LiDAR数据能够在保持DEM产品精度的同时,承受大量的数据精简[23]。Puetz等通过研究不同点云密度生产的DEM产品精度,证明了DEM精度随着点云数据密度的减小而降低[24]。本文采用平地、山地两种地形数据进行实验,考察低密度点云数据对生产DEM精度的影响,探讨满足生产DEM精度所必需的点云密度。
2.1 实验流程
1)点云数据精简:采用随机抽样算法对原始点云数据进行不同尺度的精简,得到不同密度的点云数据。
2)点云数据滤波:采用统一的TIN迭代加密滤波算法对点云数据进行滤波处理,得到地面点。
3)DEM构建及精度评定:利用滤波后得到的地面点数据进行内插处理,得到规则格网DEM产品。以质检部门验收的DEM数据作为真值,计算待评定DEM点的高程残差,并基于高程残差计算高程中误差(均方根误差为REMS),对不同密度点云数据生产的DEM产品进行精度评价。计算公式为:
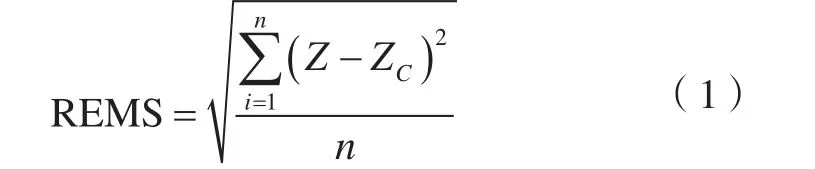
式中,Z为检查点对应的DEM点高程;ZC为检查点高程;n为检查点数量。
2.2 实验结果与分析
实验对同一地形条件的点云数据采用相同的滤波参数,平地区域最大建筑物尺寸60 m,迭代距离0.8 m,迭代角度6.0°;山地区域最大建筑物尺寸30 m,迭代距离1.2 m,迭代角度10°;DEM格网间距为2 m。表1为不同点云密度数据生产的DEM精度统计结果。DEM产品精度随着点云密度的减小而降低。整体而言,平地区域DEM精度明显高于山地区域DEM精度。高密度山地数据生产的DEM产品精度也可能高于低密度的平地区域生产的DEM产品精度。相对而言,平地区域DEM产品精度受点云密度影响较小,当平地区域点云密度从15.08降低至0.98时,DEM产品精度下降的幅度并不是很大,均能满足生产要求;而山地区域DEM产品精度随着点云密度的减小,变化的幅度较大。当点云密度为1.44时,DEM精度已经不能满足生产要求。
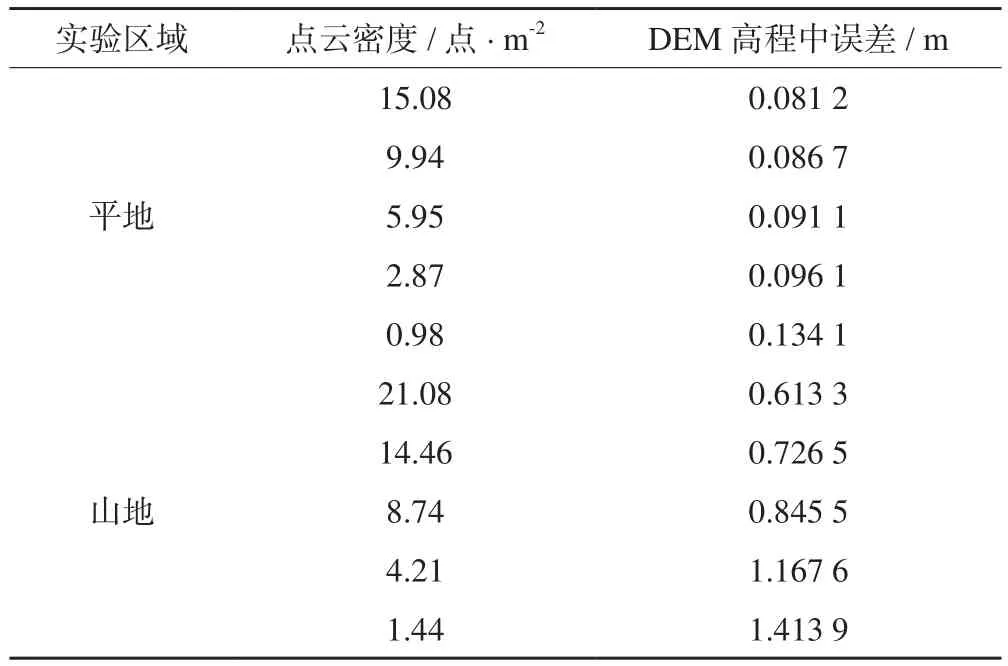
表1 不同密度数据生产DEM的高程中误差
3 点云数据密度修改
在实际应用中,有时初始的点云数据不能满足密度需求,需要对其修改,以获得需要的密度。这类处理包括点云抽稀和加密处理,本文对此进行了探讨。
3.1 点云抽稀
点云数据抽稀的主要目的是用更少的点精确表达地面、地物特征,在点云密度和数据精度之间达到平衡[25]。目前大部分点云抽稀算法都基于点云局部信息进行判断,确定当前激光脚点的取舍。根据是否加入了地形特征作为约束,LiDAR点云的抽稀算法可分为随机采样算法、基于高差的算法和基于TIN的算法等。随机采样算法包括基于虚拟规则格网的抽稀算法和基于系统的抽稀算法,适用于三维显示等对精度要求较低的应用。基于高程的算法包括Pamelas等提出的DDR(data density reduction)算法、徐景中等提出的基于点云离散度的抽稀算法等。基于TIN的算法较多,如蔡先华提出的基于地形描述误差的抽稀算法、刘春等提出的基于TIN 的抽稀算法、缪志修等提出的基于地形坡度的抽稀算法等[27-30]。以上方法都是国内外相关研究人员针对各自需求,通过理论分析,并经过相关实验验证后的有效方法,但由于在设计时考虑的目的不同,对不同地形的特征点保留能力强弱有别,在实际应用中应根据应用目的选取抽稀算法。
本实验研究城区点云数据抽稀。选取某城区LiDAR点云数据开展抽稀实验,考察低密度点云数据对精确表达城区建筑物轮廓的影响,以及满足该需求的最低点云密度。实验统计了抽稀前后点云数据的点云数量、点云密度、采用人工视觉方式判断的建筑物角点保留数量以及建筑物角点保留率,用上述4个指标评价点云数据抽稀算法。
实验数据选用某城区的机载LiDAR点云数据,按照高程渲染结果如图1中a1、b1所示,可见该区域的点云密度较大,能够详细描述区域内建筑物的外轮廓及角点等信息,但对于城区的平坦区域如公路、广场等存在着大量的数据冗余。对两组数据分别进行三种程度的抽稀实验,得到实验结果如图2中a2~a4及b2~b4所示,观察a2及b2结果,建筑物轮廓仍可得到较好的保留,且表现出更好的可视化效果。在a3及b3的结果中,存在部分建筑物角点丢失的情况,使得建筑物轮廓表现模糊,可视化效果较差。在a4及b4的结果中,存在部分建筑物背面信息丢失的情况,已经无法完全表达建筑物的轮廓。
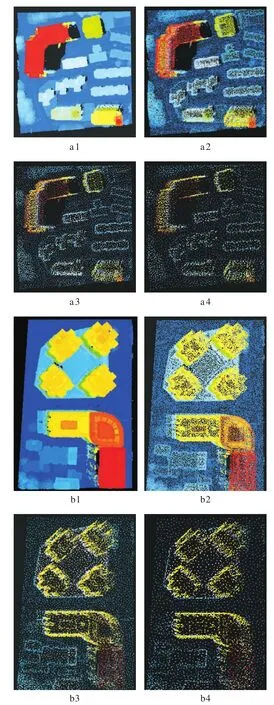
图1 按高程渲染的原始数据及实验结果
统计原始点云数据的基本信息及两组实验的点云保留率及建筑物角点保留率,结果如表2。

表2 点云数据抽稀实验结果详情表
分析发现,点云抽稀可大量减少冗余数据,提高计算效率及存储空间。随着点云密度的降低,会出现建筑物角点缺失的情况,特别是当点云密度小于每m2一个点时,建筑物角点缺失较严重,将影响建筑物的精确表达。在保证每m2大于等于两个点的情况下,建筑物轮廓能够得到精确的表达,且有更好的可视化效果。实验结果也表明,当城区点云数据密度较大、数据较多时,对点云数据采用适当的抽稀操作,能满足城区点云三维可视化、三维重建等后续应用的需求。
3.2 点云加密
由于LiDAR航线设计是按照平均点密度设置的,并且数据采集时会遇到飞行偏差较大、地形起伏剧烈等情况,造成部分地区点云数据密度达不到设计要求。要解决该问题,一种方法是采用原数据获取方式对目标区域重新进行数据采集,这需要重新设计方案并对目标区域进行扫描,必然大量增加人力、财力及时间等生产成本,且仍不能避免天气、地形等外部因素的干扰,无法确保再次采集的数据密度一定满足设计要求。为了提高数据的密度,降低生产成本,便于生产人员操作,有时可采用内业加密算法提高点云密度。
目前,已有部分学者针对点云数据的加密算法进行了研究。郑鹏飞等对曲面相交区域点云进行二次加密处理,所得结果具有较高精度,但由于采用的参考数据较少,可能会因部分误差较大的点,降低点云加密的整体精度[31]。此外,点云加密也可以采用插值方法实现。许巍等研究了距离倒数加权插值法、最近邻点插值法、移动平均插值法、局部多项式插值法、线性三角网插值法等方法,指出TIN是相对最优的方法[32]。但此方法也存在数据处理工作量大、效率较低的问题。
本文在探讨点云数据加密算法的基础上,分析加密算法对点云数据精度的影响。对包含山地、城市两种地形的多组LiDAR点云数据进行了加密实验,原始点云数据的具体信息如表3。
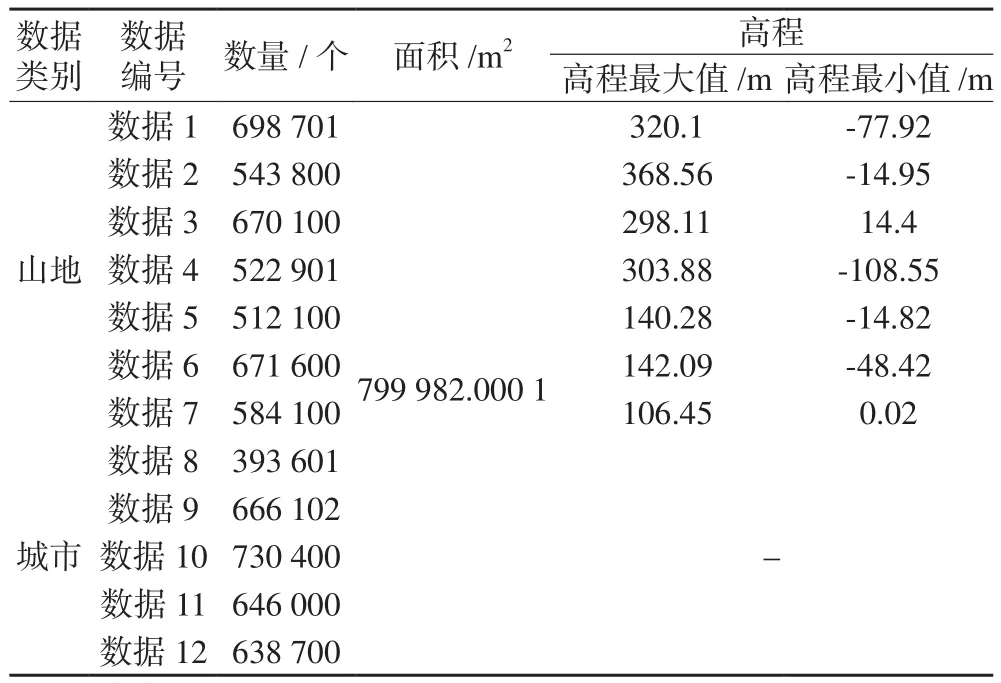
表3 点云数据详细信息
以原始点云数据为依据,计算均方根误差,评价加密后点云数据的精度变化。统计加密后点云数据的点云数量、点云密度、点云增加量及均方根误差,得到表4。

表4 点云数据加密实验结果
由表4可得,加密后点云数据的数量和密度都有了较大的提高,平均提高290.49%。根据机载激光雷达数据获取技术规范,加密后的点云密度满足分幅比例尺为1:1 000的DEM生产要求,即点云密度大于4点/m2,且所得的点云数据误差较小,可满足DEM等数字产品的生产精度要求。
4 结 语
随着LiDAR硬件技术的迅速发展,点云数据的密度不断提高,高密度的点云包含了更多的地表特征和规律。本文总结了国内外众多学者对点云密度的理论探究及应用实践,并分析了现存的主要问题。在此基础上,通过三组实验,分析点云密度特征对生产实践活动的影响,有以下结论:
1)随着点云密度的降低,DEM高程中误差逐渐增加,且山地区域增加更为明显。抽稀后较低密度的点云数据仍可满足DEM的生产需求,但山地区域的需求高于平地区域。
2)可对城区点云数据进行较大程度的抽稀,在保证2点/m2的情况下,建筑物轮廓仍能够得到精确的表达,且有着更好的可视化效果。但过度抽稀将导致建筑物角点严重缺失,影响后续应用。
3)内业的点云加密工作可在有效提高点云密度的同时产生较小的误差,使得加密后的点云满足生产实践的密度及精度需求。