基于多传感器融合的室内定位算法研究
2018-12-26徐湘寓崔颖强罗丽燕
徐湘寓,崔颖强,罗丽燕
(1.江苏省邮电规划设计院有限责任公司,江苏 南京 210000;2.桂林电子科技大学,广西 桂林 541004)
基于多传感器融合的室内定位算法研究
徐湘寓1,崔颖强1,罗丽燕2
(1.江苏省邮电规划设计院有限责任公司,江苏 南京 210000;2.桂林电子科技大学,广西 桂林 541004)
对于现有的室内定位算法存在低精度、低实用性和低传感器利用率等问题,提出了一种基于多传感器融合的粒子滤波室内定位技术,将智能移动终端与室内定位相结合,利用粒子滤波器过滤定位结果。采用行人航位推算(PDR)技术和RSSI定位技术获取行人位置信息,提高了定位精度与可靠性。此外,通过定位结果实时上传至服务器,同步递增构建位置指纹库,以适应室内环境的动态变化。实验结果表明,基于多传感器融合的定位技术与基于Wi-Fi的定位技术相比提高了定位精度与可靠性。
多传感器融合;室内定位;粒子滤波;航位推算
0 引言
随着无线网络的不断普及,目前各大商场、写字楼都已实现了无线网络全覆盖,且绝大部分人也拥有至少一部移动终端,这使得基于WIFI的定位技术成为室内定位的中流砥柱[1]。就定位精度而言,基于WIFI的室内定位技术与其他室内定位技术相比,还有着不小的差距。但从定位成本、实用性及便捷性的角度出发,能与其相提并论的主要是航位推算技术。就目前而言,由于室内环境的复杂性与多变性,单纯利用某一种定位技术,其定位精度、可靠性及成本都有相当的局限性,往往不能满足用户的需求。
近年来,得益于微电子技术的不断发展,现有的惯性传感器在诸多方面(成本、尺寸和灵敏度等)都获得了极大的提升。而且现有的移动终端也已经内嵌了诸多惯性传感器,包括加速度传感器、陀螺仪、方向传感器以及磁力计等等。因此,越来越多的高校和研究所对基于惯性传感器的室内定位技术进行了深入研究与探索。当然,在对单一传感器的室内定位技术的探索与研究中,不仅收获了众多的科研成果,同时也发现了其诸多不足之处,其中最为关键的问题就是如何解决由惯性传感器固有的累积误差导致定位结果精度以及可靠性偏低的问题。由于PDR定位系统[2]只能提供相对位置信息,因此随着时间的推移,误差将会累积,因此需要提供绝对位置信息来纠正误差[3]。 RSSI定位算法简单,可以提供绝对位置信息,无需添加额外的硬件,因此,基于PDR和RSSI的融合算法已经被广泛关注。文献[4]讨论了基于RSSI指纹信息室内定位算法,该算法仅在低噪声环境下具有高精度,不适合高噪声环境。文献[5]分析了路径衰减系数对位置精度的影响,以提高高噪声环境下的精度。文献[6]提出了一种通过测量节点能量和节点之间的几何关系来计算路径衰落指数的方法。
本文主要研究基于多传感器融合室内行人定位的粒子滤波算法。首先,通过智能手机内置的传感器预测用户运动状态及建立室内环境指纹数据库。其次,粒子滤波算法对定位结果进行滤波融合。最后,定位结果实时上传到服务器,同步构建位置指纹库。该定位算法充分利用移动终端内嵌的传感器以及WIFI网络基础设施获取用户运动过程中的参数,增加了实用性与用户友好性。
1 基于多传感器融合的室内定位算法
本文采用WIFI与多传感器融合的室内定位技术来估算行人位置并绘制相应的运动轨迹。基于WIFI与多传感器融合的室内定位技术的整体框图如图1所示。

图1 基于WIFI与多传感器融合的室内定位技术的整体框图
1.1 运动模型
采用航位推算技术估算用户位置信息,为降低成本采用步数与步长的乘积来估算用户的相对位移量。

(1)
式中,xt、yt分别为用户的位置坐标;lt为用户t时刻的步长;θt为用户t时刻的运动方向。其基本原理如图2所示。
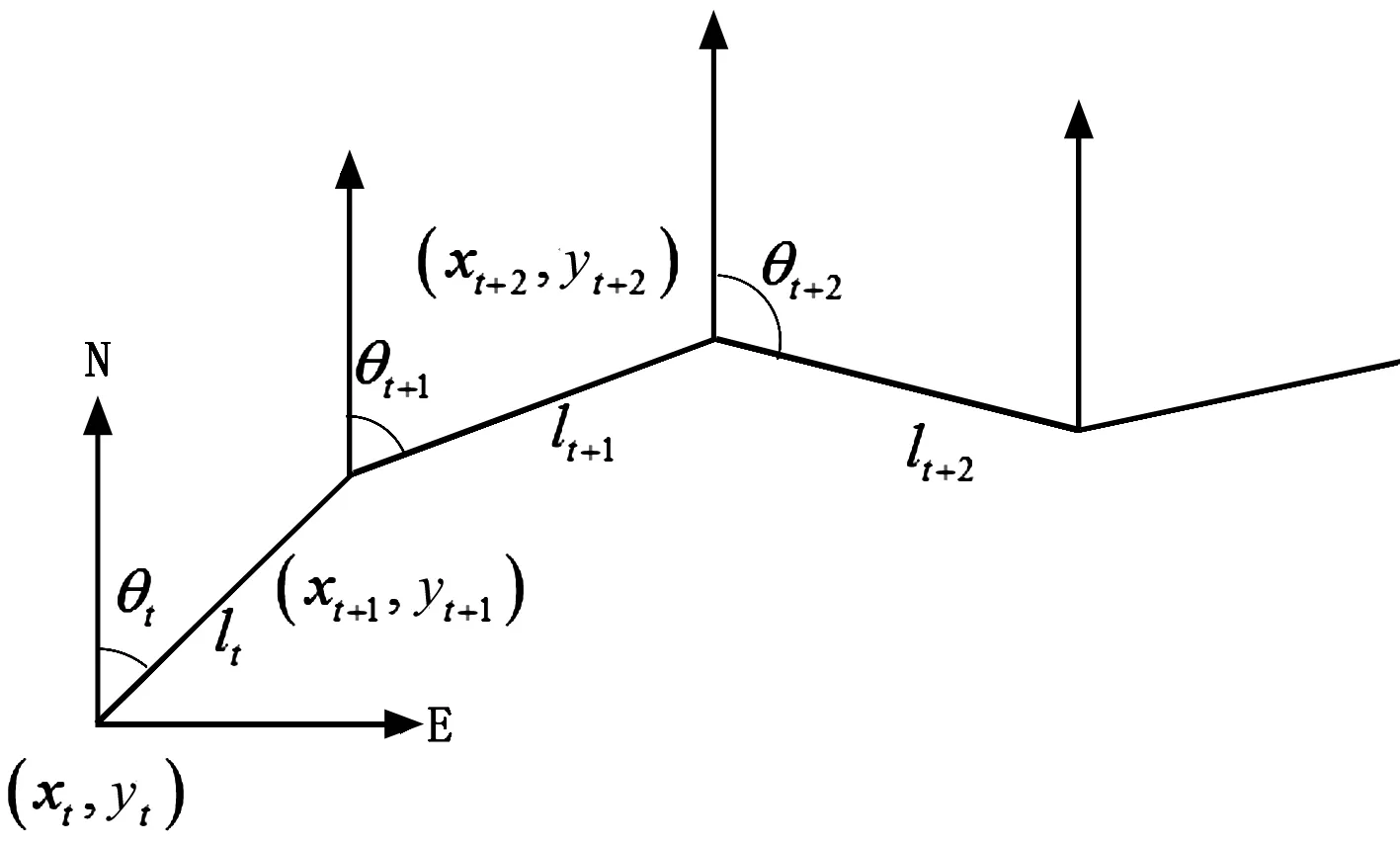
图2 航位推算示意
需要解决的3个问题:步数检测、步长计算和运动方向的确定。
用户的运动行为包括运动方向与运动距离。在行人行走过程中,身体各部分如腿、腰、肩膀和手臂等部位都会产生相应的运动,这些运动产生的加速度、角速度等也会随之发生周期性的变化[7-11]。本文采用加速度传感器、磁力传感器和陀螺仪来感知用户的运动行为。其中加速度传感器用户运动状态、步数检测和步长估算。利用方位传感器与陀螺仪相融合的方式估算用户运动方向的信息。
1.2 观测模型
将行人在当前位置接收到的无线信号的RSSI转换为用户位置信息,作为对环境的观测。位置指纹定位技术可以分为离线训练阶段与在线定位阶段。基本原理如图3所示。

图3 位置指纹定位技术基本原理
文献[12]中提到RP的数量和位置,物理布局和RSS的平均值对定位精度有重大影响。 为了优化AP放置,文献[13]中提出了一种新颖的方法,通过使用少量的AP来提供全覆盖,同时将移动设备定位在有限大小的区域内。 文献[14]提出了一种基于遗传算法和嵌入式掩码机制的目标编程驱动模型,解决了多目标AP部署建设和增强的问题。
2 粒子滤波融合
采用粒子滤波[15-20]对用户位置概率密度函数进行近似,对行人运动方向进行滤波。
2.1 初始化
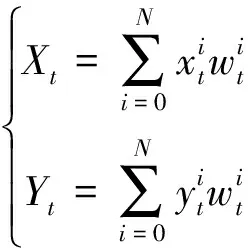
假设用户的初始位置为x0,y0以及粒子结构为Xt=xt,yt,wt,θtT。其中xt,yt表示用户的二维坐标;wt与θt分别为位置权值与航向。每个粒子表示用户的一个可能的运动状态信息。
2.2 粒子传播模型
采用航位推算技术对行人位置进行估算,其中不同的方向(粒子)会产生不同的位置信息,因此粒子传播模型为:
(2)

2.3 用户坐标估算及粒子权值更新
用户位置计算公式为:
(3)
粒子权重更新如公式为:
(4)

权值归一化如公式为:
(5)
2.4 最优位置计算
通过上述步骤可以得出行人可能的位置信息及它们所对应的权值,最后采用加权准则来估算其位置信息。
(6)
2.5 粒子重采样
随着用户不断前进,粒子会出现退化现象,因此需要对粒子集进行重新采样以提高粒子的多样性。多传感器融合的室内定位算法流程如图4所示。

图4 室内定位算法流程
3 实验设计与结果分析
实验选取桂林电子科技大学金鸡路校区第8教学楼3层东半部作为实验场地,整个实验场地大约为20 m×17 m。该实验场所包含4个教室和1个走廊。4个AP分别部署在8 309、8 310、8 311与8312四个教室当中,如图5所示。选取TP-LINK路由器作为WIFI信号发射点,移动终端选取华为荣耀7手机。
数据采集软件是基于Android4.4手机操作系统下编程实现的。实验者持有安装该数据采集软件的手机在实验场所中按照预定的轨迹行走。

图5 实验场地示意
3.1 步数检测
本次实验的实验步数与实验次数都设定为100步和100次,分2个不同的实验者进行测试,每人50次。加速度传感器原始数据如图6所示。卡尔曼滤波后的净加速度值变化曲线如图7所示。实验结果如图8所示。

图6 加速度传感器原始数据

图7 卡尔曼滤波后的净加速度值变化曲线

图8 基于加速度传感器的计步结果
最终的试验结果表明,1步之内误差大约在 46%,3步之内的误差大约在83%。加速度传感器可以较为准确地检测行人步数。
3.2 方向检测
假设实验者的初始航向为0°,实验者行走一段距离之后掉头,然后旋转90°继续行走一段时间停止,实验者总计步行距离大约为35 m,步行时间大约在46 s。
从图9可以看出,方向传感器在行人转弯时存在一定的延时。如图10所示,基于陀螺仪推算得出的角度与实际角度之间的误差大约在20°(此误差仅仅考虑直线行走情况,转弯等情况另行讨论)。实验者第1次变向为快速转弯,因此瞬间产生的加速度会比较大,导致基于陀螺仪的航向推算出现一个比较大的波动点。第2次变向是缓慢进行的行为,因此图中并未出现比较大的波动点。实验结果表明,方位传感器虽然能够实现航位角的绝对估算且没有误差累积,但面对行人航向的变化有些力不从心;而陀螺仪对运动方向的变化较为敏感,但只能进行相对航向估算。
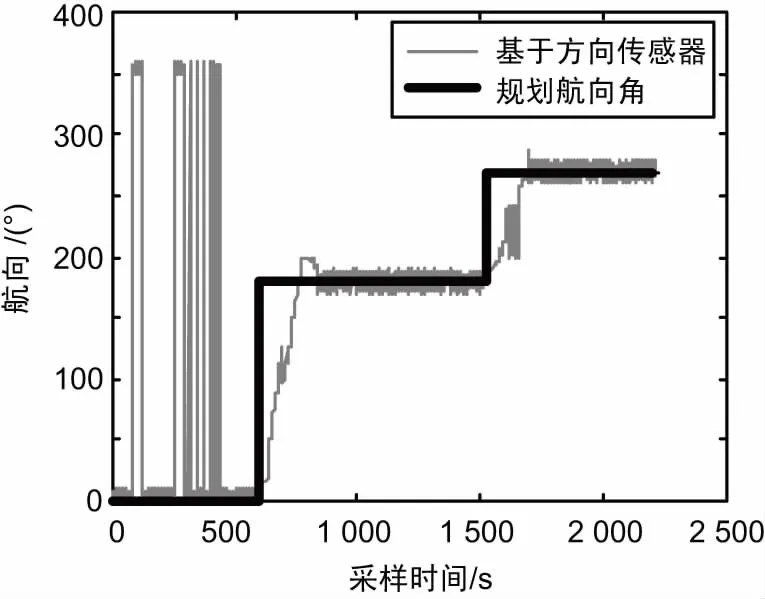
图9 基于方向传感器的航向推算

图10 基于陀螺仪的航向推算
通过上述的比较与分析得出结论:二者可以取长补短,通过方向传感器与陀螺仪的融合来实现行人航向估算。
为了直观地展示二者融合的优势,绘制了图11和图12,对比上述3种方法的实验结果。通过卡尔曼滤波融合之后,航向估算值得到了切实的改善,但还是出现航向估算值围绕正确航向值上下波动的情况,但其波动幅度小于单纯基于方向传感器的航向角推算,所以采用均值滤波对其进行平滑滤波处理;在面对行人转弯的情况时,经过卡尔曼滤波之后的航向估算值在追踪速度与准确性等方面明显优于其他2种方法。
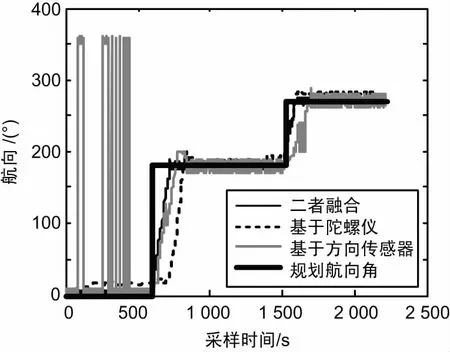
图11 3种航向角估算对比

图12 3种航向角估算对比局部放大图
3.3 定位结果实时上传,递增式构建位置指纹库
按照1 m×1 m的小方格作为信号强度采集点所得到的定位轨迹图如图13所示,其平均误差大约在2.019 5 m左右;按照0.5 m×0.5 m的小方格作为信号强度采集点所得到的定位轨迹图如图14所示,其平均误差大约在1.951 2 m左右。
对比图13和图14可以看出,增加定位区域的采样点数可以提高指纹定位的精确度,同时也增加了离新阶段数据采集和处理的工作量,不利于面积较大的室内环境下定位。而定位结果实时上传,递增式构建指纹数据库的方法不仅使定位精度得到了切实改善,同时也减少了离线阶段的工作量。由图15可以看出,随着用户位置指纹的上传,其定位精度大约在1.853 1 m左右,匹配的准确率有所提高。
通过上述3种情况下的指纹定位轨迹图的比较,可以得出以下结论,通过增加数据采集点,即增加指纹数据库可以在一定程度上提高定位精度。其方法有2种:增加离线阶段的工作量,划分更加细致的方块去建立位置指纹信息;对已有的位置指纹库进行更新,根据定位结果和测得的指纹数据对原先的数据指纹库进行更新。同时,基于WIFI定位的轨迹图无法准确的体现用户的运动轨迹。

图13 指纹定位轨迹图(参考点设置1 m)

图14 指纹定位轨迹图(参考点设置0.5 m)

图15 指纹定位轨迹图(递增式构建指纹数据库)
3.4 多传感器融合的室内定位算法的定位性能测试
在教室内,行人在预定的运动轨迹上匀速运动并利用移动终端不断采集加速度计、陀螺仪、磁力计、方向传感器以及AP点的信号强度数据。
由图16可知,多传感器融合的定位轨迹与实验者实际行走轨迹更加匹配。2种定位算法的误差对比如图17所示。

图16 航位推算与融合定位定位对比

图17 航位推算与融合定位结果误差分析
3种定位算法的定位精度如表1所示。从表1可以看出,航位推算大约79%的定位误差是在1.316 m左右,位置指纹定位算法大约53%的定位误差是在1.853 1 m左右,而多传感器融合的定位算法大约87%的定位误差是在0.471 5 m左右。
表1 3种定位算法的定位精度

定位算法定位精度/m多传感器融合0.4715(87%)PDR算法1.3160(79%)WIFI定位1.8531(53%)
不同粒子数情况下的定位轨迹图如图18所示,当粒子数N=100时,其定位误差大约为0.471 5 m;当粒子数N=1 000时,其定位精度提高到0.358 7 m左右。但粒子数的增加意味着定位算法计算量以及计算时间的增加,这大大影响了定位算法的实时性。
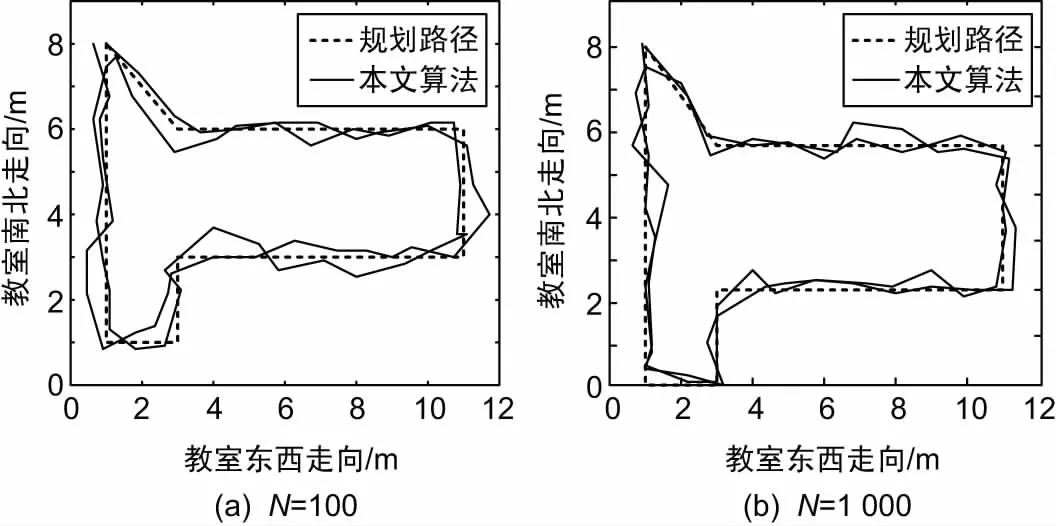
图18 室内定位轨迹图
图19直观地展示了多传感器融合的室内定位算法针对不同粒子数的误差分析。

图19 不同粒子数的室内定位误差对比
3.5 算法鲁棒性验证
为了验证多传感器融合的室内定位算法的鲁棒性,还对以下因素对定位精度的影响进行了相关实验:行人行走的速度、频率和步幅。接下来的实验过程中,依次将各实验条件替换为慢速行走、跑步和步幅大小变化的行走。在这3种实验条件下,分别用多传感器融合、航位推算和位置指纹定位进行定位,并对实验结果进行分析,定位误差如表2所示。
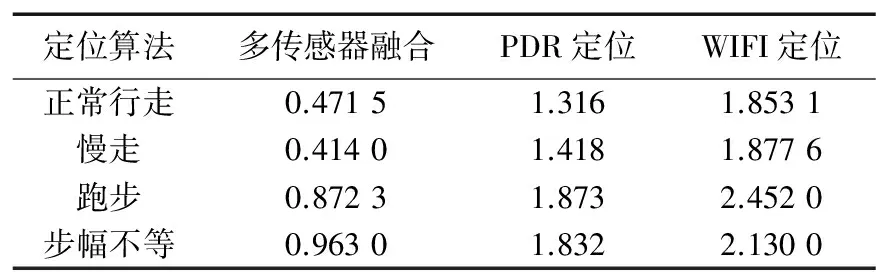
表2 鲁棒性验证 (m)
如表2所示,与PDR及RSSI定位算法相比,多传感器融合的室内定位算法的适用性与实用性更加具有优势。单独采用航位推算进行定位,其定位误差主要来源于传感器的误差累积,尤其是在快速行走或者变速行走时,人体的摆动增加了传感器的噪声导致定位误差增大。而本文算法是在航位推算的基础之上融合位置指纹定位,并用粒子滤波算法对定位结果进行滤波矫正,一定程度上降低了上述因素对定位精度的影响,提高了算法的鲁棒性。
4 结束语
由于现有的室内定位技术具有成本高、定位精度低和传感器利用率低等缺陷,本文对基于多传感器融合的室内行人定位算法进行了进一步研究。从上述实验结果可以看出,该算法的平均误差在0.47 m左右,而基于WIFI位置算法的平均误差为1.85 m。本文算法可以提高定位精度、稳定性和实时性,达到良好的定位效果。
[1] HARLER.A Survey of Indoor Inertial Positioning Systems for Pedestrians[J].IEEE Communications Surveys & Tutorials,2013,15(3):1281-1293.
[2] CHOH,KWON Y.RSS-based Indoor Localization with PDR Location Tracking for Wireless Sensor Networks[J].AEU-International Journal of Electronics and Communications,2016,70(3):250-256.
[3] ZAMPELLA F,ANTONIO R J R,SECO F.Robust Indoor Positioning Fusing PDR and RF Technologies:The RFID and UWB case[C]∥International Conference on Indoor Positioning and Indoor Navigation.IEEE,2014:1-10.
[4] CHENG L,WU C D,ZHANG Y Z.Indoor Robot Localization Based on Wireless Sensor Networks[J].IEEE Transactions on Consumer Electronics,2011,57(3):1099-1104.
[5] YANGL,CHEN H,CUI Q,et al.Probabilistic-KNN:A Novel Algorithm for Passive Indoor-Localization Scenario[C]∥Vehicular Technology Conference.IEEE,2015:1-5.
[6] MAO G,Anderson B D O,Fidan B.Path Loss Exponent Estimation for Wirelesssensor Network Localization[J].Computer Networks,2007,51(10):2467-2483.
[7] WANG C S,LIN S L.An Integrated Optimization Model for Wireless Access Point Deployment Construction,and Enhancement[C]∥Ieee/acis International Conference on Software Engineering,Artificial Intelligence,NTWORKING and Parallel/distributed Computing.IEEE,2015:1-6.
[8] BANDIRMALI N,TORLAK M.ERLAK:On the Cooperative Estimation of the Real-Time RSSI Based Location and K Constant Term[C]∥Wireless Personal Communications,2017:1-10.
[9] 刘斌,刘宏建,金笑天,等.基于智能手机传感器的人体活动识别[J].计算机工程与应用,2016,52(4):188-193.
[10] 汪仲伟,孙广中.LiveData——基于智能手机传感器的用户数据采集系统[J].计算机科学,2014,41(10):27-30.
[11] LI Y,XUE F,FENG L,et al.A Driving Behavior Detection System Based on a Smartphone′s built-in sensor[J].International Journal of Communication Systems,2016,51(3):18-21.
[12] BAALA O,ZHENG Y,CAMINADA A.The Impact of AP Placement in WLAN-Based Indoor Positioning System[C]∥Eighth International Conference on Networks.IEEE Computer Society,2009:12-17.
[13] SUNL J,WANG S.Algorithm Based on MR Location Fingerprint Positioning[J].Telecom Engineering Technics & Standardization,2016,32 (14):148-151.
[14] LIAO L,CHEN W,ZHANG C,et al.Wireless Access Point Deployment for Both Coverage and Localization[J].IEEE Transactions on Vehicular Technology,2010,60(5):2239-2252.
[15] 王法胜,鲁明羽,赵清杰,等.粒子滤波算法[J].计算机学报,2014,37(8):1679-1694.
[16] CARPENTERJ,CLIFFORD P,FEARNHEAD P.Improved Particle Filter for Nonlinear Problems[J].IEE Proceedings - Radar,Sonar and Navigation,2002,146(1):2-7.
[17] 程兰,王志远,陈杰,等.基于粒子滤波和滑动平均扩展Kalman滤波的多径估计算法[J].电子与信息学报,2017,39(3):709-716.
[18] HOL J D,SCHON T B,GUSTAFSSON F.On Resampling Algorithms for Particle Filters[C]∥Nonlinear Statistical Signal Processing Workshop.IEEE,2006:79-82.
[19] SUN C J,KUO H Y,LIN C E.A Sensor Based Indoor Mobile Localization and Navigation Using Unscented Kalman Filter[C]∥Position Location and Navigation Symposium.IEEE Xplore,2010:327-331.
[20] ITO T,ANZAI D,WANG J.A Modified Particle Filter Algorithm for Wireless Capsule Endoscope Location Tracking[C]∥International Conference on Body Area Networks.ICST (Institute for Computer Sciences,Social-Informatics and Telecommunications Engineering),2013:536-540.
AnIndoorPedestrianLocalizationAlgorithmBasedonMulti-sensorInformationFusion
XU Xiangyu1,CUI Yingqiang1,LUO Liyan2
(1.JiangsuPost&TelecomrnunicationsPlanningandDesigningInstituteCo.Ltd,Najing210000,China;2.GuilinUniversityofElectronicTechnology,Guilin541004,China)
Considering that existing indoor localization algorithms have the problems such as low accuracy,high cost in deployment and maintenance,lack of robustness and low sensor utilization,this paper proposes a particle filter algorithm based on multi-sensor fusion.The algorithm combines the smart mobile terminal with indoor localization,and filters the result of localization with the particle filter.In this paper,a dynamic interval particle filter algorithm based on pedestrian dead reckoning (PDR) information and RSSI localization information is used to improve the filtering precision and the stability.Moreover,the localization results will be uploaded to the server in real time,and the location fingerprint database will be built incrementally to adapt to the dynamic changes of the indoor environment.Experimental results show that the algorithm based on multi-sensor fusion improves the localization accuracy and robustness compared with the location algorithm based on Wi-Fi.
multi-sensor fusion;indoor localization;particle filter;pedestrian dead reckoning (PDR)
2017-06-04
国家自然科学基金资助项目(61371107);广西信息科学实验中心基金资助项目(LD16061X);广西自然科学基金资助项目(2016GXNSFBA38014);中国博士后科学基金资助项目(2016M602921XB)
10.3969/j.issn.1003-3106.2018.01.03
徐湘寓,崔颖强,罗丽燕.基于多传感器融合的室内定位算法研究[J].无线电工程,2018,48(1):10-16.[XU Xiangyu,CUI Yingqiang,LUO Liyan.An Indoor Pedestrian Localization Algorithm Based on Multi-sensor Information Fusion[J].Radio Engineering,2018,48(1):10-16.]
TN915.04
A
1003-3106(2018)01-0010-07

徐湘寓男,(1992—),毕业于桂林电子科技大学信息与通信工程专业,硕士,助理工程师。主要研究方向:传感器网络。
崔颖强男,(1985—),工程师。主要研究方向:通信网络规划与设计、无线网络传感器。
罗丽燕女,(1987—),博士,硕士生导师。主要研究方向:智能定位、无人机监控、无线网络传感器和超宽带通信等。
