南极罗斯海高分辨率数字水深模型
2018-12-25徐泽高金耀杨春国沈中延
徐泽 高金耀 杨春国 沈中延
(1国家海洋局海底科学重点实验室, 浙江 杭州 310012;2国家海洋局第二海洋研究所, 浙江 杭州 310012)
提要 数字水深模型是描绘海底地形地貌的水深地形图, 在罗斯海陆架上, 冰盖的进退形成形态大小各异的海底冰川地貌, 而对海底冰川地貌的解释研究需要高分辨率数字水深模型的支持。采用36个国际公开航次采集到的多波束水深数据以及GEBCO_2014网格水深数据, 融合、编绘成50 m网格间距的高分辨率罗斯海数字水深模型。由于采用的多波束水深数据来源于不同调查船只、不同多波束声呐系统及不同航次, 这给多波束水深数据的精度评估、融合等带来一定的困难。本文首先采用通用绘图工具(GMT)对多波束中央波束水深数据的交点误差做统计分析, 再利用统计分析结果对不同航次水深数据做出精度评估,最后利用“移除-恢复”法对两种来源及精度不同的水深数据做最后的融合。通过以上步骤得到的罗斯海高分辨率数字水深模型与国际南大洋水深地形图(IBCSO)相比, 能够更加清晰地凸显海底微地形地貌特征,尤其是冰川进退过程中产生的地貌特征, 可满足罗斯海海底冰川地貌的解释工作及综合地质地球物理研究任务。
0 引言
南极冰盖覆盖面积达13.6×106km2,体积约占全球总冰量的90%, 如果冰盖全部融化, 将导致全球海平面上升约66 m[1]。南极冰盖被横贯南极山脉分为东南极冰盖和西南极冰盖, 其中西南极冰盖为海洋型冰盖, 冰盖接地线大部分位于平均海平面以下, 受海洋环境因素影响较大, 对气候变化非常敏感。罗斯海作为西南极冰盖向海延伸的一个主要区域, 在地质历史上受气候变化的影响, 冰盖活动较为显著, 冰盖的进退在海底形成各种不同形态、尺度的冰川地貌, 这些海底冰川地貌对于理解历史上南极冰盖的进退过程具有重要的指示意义。“十二五”期间, 依托“南北极环境综合考察与评估”专项, 我国在罗斯海区域进行了多年的地质地球物理考察, 旨在探究地质历史中西南极冰盖在罗斯海的活动动态及与全球气候变化的关系, 然而, 这些地质地球物理资料的合理解释离不开高分辨率海底地形数据的支持。
目前, 罗斯海区域还没有公开的高分辨率水深地形图。国际上已公开的多个全球或半球区域的水深地形图, 分辨率都较低。Arndt等[2]于2013年发布了第一版国际南大洋水深地形图(IBCSO Version 1.0), 采用了来自15个国家30个机构的水深数据, 范围在60°S以南, 其中包括多波束水深数据、单波束水深数据、数字化海图的水深数据等, 其网格间距为500 m×500 m。Weatherall等[3]于2014年发布最新一版全球海底地形图(GEBCO_2014),利用 IBCAO Version 3.0、IBCSO Version 1.0等最新数据对GEBCO_08进行了更新, 网格间距为30弧秒。Becker等[4]于2009年发布了分辨率为 30弧秒的全球水深和高程数据(SRTM30_PLUS)。IBCSO、GEBCO_2014和 SRTM30_PLUS提供的南大洋或全球的水深地形图, 包含了罗斯海区域水深地形图。但是, 以上 3个水深数据产品提供的罗斯海区域水深地形图分辨率较低, 最高的分辨率为 500 m, 难以满足罗斯海陆架地区海底冰川地貌和历史上冰川活动等的解释研究工作要求。
为了得到罗斯海区域高分辨率的水深地形图,满足罗斯海海底冰川地貌的解释工作及综合地质地球物理研究任务, 本文采用36个公开航次多波束水深数据和GEBCO_2014网格数据, 利用多波束的中央波束水深数据对水深数据质量进行精度评估[5], 采用移除-恢复法[6-7]对不同来源和分辨率的水深数据进行融合。最终得到罗斯海高分辨率的数字水深模型, 其网格间距为50 m, 能够清晰地凸显海底冰川地貌特征, 这些冰川地貌是历史上罗斯海冰川进退的有力证据。
1 数据与方法
1.1 数据来源
本文采用36个公开航次的罗斯海多波束水深数据(表1), 范围为160°E—150°W, 71°S—79°S。其中10个航次的水深数据来自于美国国家地球物理数据中心(The National Geophysical Data Center,NGDC), 其余26个航次的数据来源于海洋地球科学数据系统(Marine Geoscience Data System,MGDS)。由于采用不同的调查船和多波束测深仪(Nathaniel B.Palmer调查船航次30个, 多波束声纳系统型号有SeaBeam 2112和Kongsberg EM120;Healy调查船航次1个, 多波束声纳系统型号为SeaBeam2112; Oden调查船航次1个, 多波束声纳系统型号为 Kongsberg EM122), 且采集时间跨度大(1994—2013年), 因此导致不同航次的水深数据质量参差不齐。
罗斯海多波束水深数据空间分布不均匀, 主要分布在罗斯海西部(图1), 且仍有许多区域没有多波束水深数据。在罗斯海高分辨率数字水深模型制作过程中, 对于没有多波束水深数据的区域, 本文利用分辨率为 30弧秒的 GEBCO_2014网格水深数据填充。
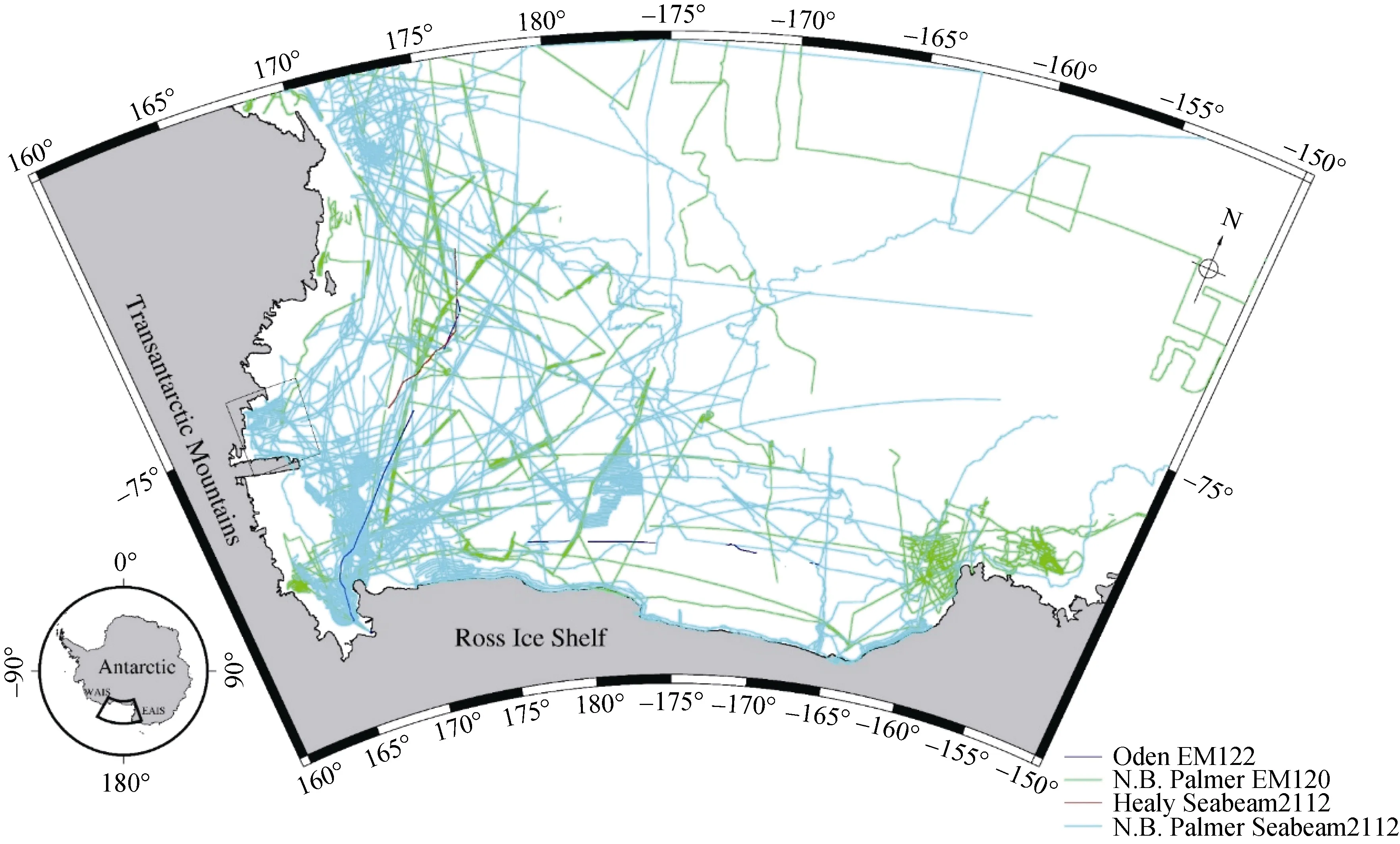
图1 罗斯海不同调查船和多波束声纳系统航迹分布图Fig.1.Tracks of different vessels and multi-beam systems

表1 多波束水深数据来源以及单独航次交点差统计分析结果Table 1.Multi-beam source data and crossover statistics for individual cruise
1.2 数据预处理
多波束声纳系统在数据采集过程中, 由于各种误差的影响, 导致出现水深异常点, 在成图之前需要剔除这些水深异常点。首先利用MBsystem软件[8]对每个航次数据进行处理, 自动删除水深异常点,然后提取处理后的数据, 并保存为 ASCII XYZ数据格式。接着利用QPS Fledermaus软件对XYZ数据进行可视化成图, 检查成图结果, 再次识别水深异常点, 利用Fledermaus软件中的3D Editor模块手动删除水深异常点, 接着导出处理后的数据。重复上一步骤, 直至完全删除水深异常点, 将处理后的水深数据保存为ASCII XYZ数据格式(图2)。

图2 数据预处理与罗斯海数字水深模型制作流程Fig.2.Scheme showing data pre-processing and gridding steps to produce the digital bathymetry model of Ross Sea
1.3 数据精度评价
多波束水深数据的误差主要来源于声速剖面、横摇、纵摇和艏摇等。其中声速剖面对中央波束水深影响最小, 对边缘波束水深影响最大[9]。对于多波束水深数据, 通常采用主测线和检查测线的交点处水深不符值(交点差)来评价其质量。GMT中的x2sys工具包已被应用于许多船测航迹数据(重力、磁力等数据)的质量评价[10]。由于x2sys工具只能应用于航迹数据, 而多波束系统在沿测线航行过程中, 采集到的数据为条带数据,在垂直于航迹方向, 条带的宽度与扇区开角和水深等有关[11]。因此, 对于处理后的多波束水深数据, 为了能够应用 x2sys工具包进行数据精度评价, 本文首先使用 MBSystem软件抽取多波束每3个相邻ping的中央波束水深并取平均值, 然后利用GMT软件中的x2sys工具包对交点处水深不符值做精度评估。利用每3个ping的中央波束水深平均值可以减小偶然误差对交点差分析的影响,同时也能减小数据处理的时间。
x2sys工具包为GMT的一系列命令集合, 可以计算交点的位置和交点差的平均值及标准差。若交点处没有水深观测值, 则利用最近点水深观测值进行线性插值。当船速较小或调查船在小范围内来回航行时, 会导致 x2sys工具算出大量的重复交点。因此在计算交点的时候, 把船速限制在 2节以上, 以避免大量重复交点的出现影响到结果。为了确定每个航次数据的可靠性, 对每一个航次数据进行统计分析, 计算每个航次内部所有交点差的平均值、均方根差以及相对误差(表1)。对于相同调查船和多波束声纳系统型号的航次,认为其数据质量基本一致, 并将相同调查船和多波束声纳系统型号的航次分为一组, 分别计算每组所有航次的内部交点差和外部交点差的平均值、均方根差以及相对误差(表2)。
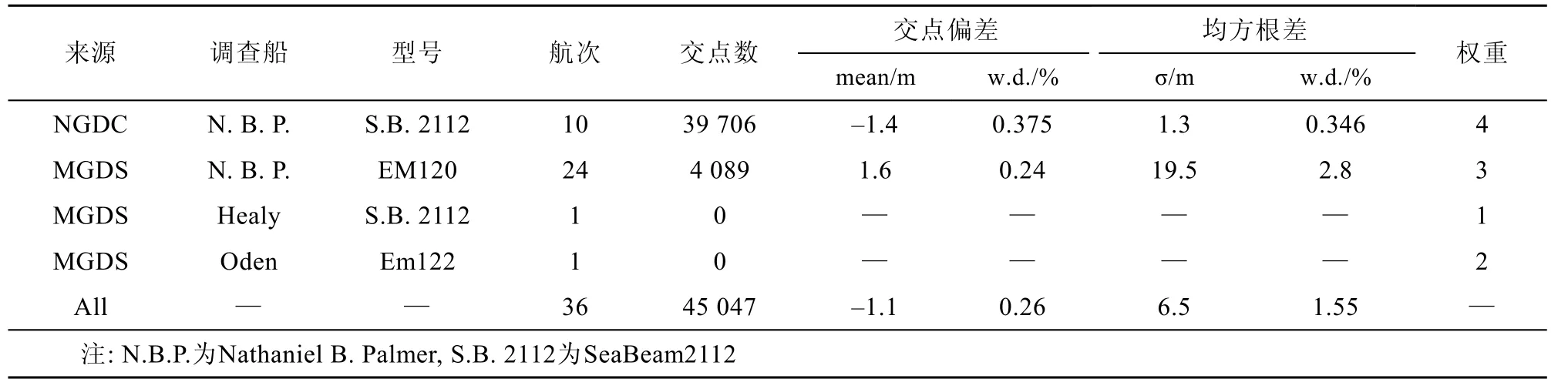
表2 根据相同调查船与多波束声纳系统型号的分组统计分析结果Table 2.Crossover statistics grouped by similar vessel, sonar system aboard
1.4 数据融合
由于罗斯海多波束水深数据覆盖较少, 仍有很多区域没有实现多波束水深数据的覆盖。对于这些区域, 在数据融合过程中, 使用 GEBCO_2014水深网格数据对其填充。因此, 罗斯海数字水深模型将由两种不同类型数据融合而成, 一种是高分辨率的多波束水深数据, 另一种是低分辨率的 GEBCO_2014网格水深数据。采用移除-恢复法(图2)对两种不同类型的数据进行融合, 使用该方法, 在多波束水深覆盖到的区域可以保留其高分辨率的特性, 而其他区域则可以被低分辨率水深数据覆盖, 保证水深数据的全覆盖[12]。
1.多波束水深数据网格化
将采用相同调查船和多波束声呐系统型号的航次分为一组, 共分4组(表2)。首先, 利用GMT软件中“nearneighbor”命令[13]分别对4组多波束水深数据网格化, 得到 4个网格文件, 网格分辨率为50 m。使用该网格化命令, 可以使高分辨的水深数据限制在多波束数据覆盖到的区域, 而网格的其他区域则没有数据。
由于4个网格文件来源于4组数据质量不同的航次, 在 4个网格文件合并过程中, 对于不同网格文件之间的相互重叠覆盖区, 优先选取数据质量高的网格文件, 舍弃数据质量低的网格文件。均方根差和相对误差真实反映了测量数据的质量高低, 均方根差和相对误差的值越小, 代表测量数据质量越好[14]。为了便于下一步使用GMT软件对 4个不同数据质量的网格文件进行合并,本文用权重代表测量数据质量的高低, 权重为 4代表数据质量最优(均方根差和相对误差最小),权重为 1代表数据质量最差(均方根差和相对误差最大)。根据每组水深数据的均方根差和相对误差的大小(表 2, 图3), 将第一组 Nathaniel B.Palmer调查船SeaBeam2112多波束10个航次水深数据得到的网格文件分配权重为4(该组数据均方根差和相对误差最小, 数据质量最优), 将第二组Nathaniel B.Palmer调查船EM120多波束24个航次水深数据得到的网格文件分配权重为3(该组数据均方根差和相对误差较小, 质量次之)。第三组Healy调查船SeaBeam2112多波束和第四组Oden调查船 Em122多波束各自只有一个航次的水深数据, 没有交点, 无法计算均方根差和相对误差, 在没有均方根差和相对误差的前提下, 以数据采集的年代远近为依据, 认为采集年代较近的测量数据的质量优于采集年代较远的测量数据的质量, 基于此, 对第三组 Healy调查船水深数据网格化得到的网格文件分配权重为 1(2003年采集), 对第四组 Oden调查船水深数据网格化得到的网格文件分配权重为2(2010年采集)。
使用 GMT软件中修改后的“grdmath”命令中的XOR操作符将4个网格文件合并。首先将权重为1和2的网格叠加, 如果对于某一网格节点权重为1和2的网格都不存在水深值, 则叠加后的网格该节点处水深取空值, 如果权重为 2的网格在该节点存在水深值则取该水深值, 否则, 取权重为 1的网格在该节点的水深值。将得到的网格与权重为3的网格叠加, 随后再与权重为4的网格叠加。使用该方法, 在每次叠加过程中可使得数据质量高(权重大)的网格得以保留。最后, 得到一个 50 m分辨率的多波束水深网格文件(图4)。
2.全部水深数据网格化

图3 根据相同调查船与多波束声纳系统型号, 将所有航次分组, 并对每组统计分析交点差Fig.3.Crossover-error(COE) statistics grouped by same vessel and sonar system
其次, 利用 GMT软件对全部罗斯海多波束水深数据和GEBCO_2014水深数据网格化, 其中网格分辨率为500 m×500 m。然后对得到的网格文件重新采样, 重新采样后的网格文件分辨率为50 m×50 m, 得到一个低分辨率的水深网格文件。
3.两种不同分辨率网格融合
最后, 利用 GMT软件对上述步骤(1)得到的多波束高分辨率网格和步骤(2)得到的低分辨率网格融合, 得到最终的网格文件, 即罗斯海高分辨率数字水深模型(图5)。
2 结果
2.1 数据精度分析
由于交点偏差受水深的影响, 随水深的变化而变化, 使用均方根差不能完全表达测量结果的精度高低, 因此引入相对误差的概念对水深数据质量进行评价。主测线和检查测线交点处水深不符值与平均值的百分比称为相对误差, 相对误差愈小, 测量数据精度愈高[14]。对 Nathaniel B.Palmer调查船SeaBeam2112多波束10个航次交点差分析结果表明(图3, 表2), 共有39 706个内部交点和外部交点, 平均交点差为1.4 m, 均方根差为 1.3。平均交点差的相对误差为 0.3%, 均方根差的相对误差为0.3%。共有91.8%的交点偏差小于2 m, 99.5%的交点偏差小于水深的1%。从2002年之后, Nathaniel B.Palmer调查船多波束系统型号更换为Kongsberg EM120, 到2013年共24个航次, 对其分析结果表明, 共有 4 089个内部和外部交点, 平均交
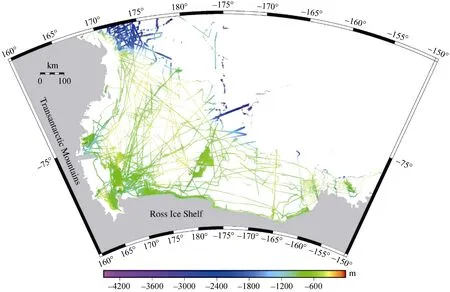
图4 罗斯海高分辨率多波束水深地形图Fig.4.High-resolution multi-beam bathymetric topographic maps of Ross Sea

图5 罗斯海数字水深模型Fig.5.Digital bathymetry model of Ross Sea
点偏差为1.6 m, 均方根差为19.5。平均交点差的相对误差为0.2%, 均方根差的相对误差为2.8%。共有70.6%的交点偏差小于2 m, 90.5%的交点偏差小于水深的1%。对全部航次计算内部交点和外部交点, 结果表明, 总交点数为45 047, 平均交点偏差为1.1 m, 均方根差为6.4。平均交点差的相对误差为0.2%, 均方根差的相对误差为1.5%。共有88.7%的交点偏差小于2 m, 98.3%的交点偏差小于水深的1%。
2.2 与其他产品比较
国际南大洋水深地形图(IBCSO Version1.0)提供了南大洋500 m×500 m网格分辨率的海底地形图,其中包括罗斯海海底水深地形图, 其使用了许多单波束水深数据、多波束水深数据和卫星测高水深数据等, 其中多波束数据包含了罗斯海数字水深模型中的36个多波束航次数据。由于其网格间距为500 m,分辨率较低, 造成许多海底微地貌特征无法辨别,尤其是位于罗斯海陆架内的海底冰川地貌特征。而对于其他水深地形产品(SRTM30_PLUS与GEBCO_2014, 分辨率30弧秒), 分辨率比IBCSO Version1.0都要低, 因此海底冰川地貌特征更加无法辨别。
相比于IBCSO Version1.0, 罗斯海数字水深模型(RossSea_DBM)中多波束水深数据覆盖到的区域网格间距为50 m, 其他区域虽然网格间距也为50 m, 但是这些区域是由30弧秒分辨率的 GEBCO_ 2014网格数据重采样为50 m 网格间距后生成的, 分辨率并不高。对于存在多波束水深数据的区域, 网格分辨率为50 m, 直径在50 m以上的海底微地形地貌特征可以很容易地被识别出来, 而在 IBCSO中, 则观察不到这些微地貌特征。例如, 古冰川运动在海底形成的大规模线性划痕(MSGL)可以清晰地被观察到(图6d),而在相同位置, SRTM30_PLUS、GEBCO_2014与IBCSO V1.0中则观察不到这些地貌特征(图6a, b, c)。而由于采用的多波束数据来源相同, 因此不存在是由于数据缺失造成IBCSO V1.0中观察不到这些地貌特征的原因。
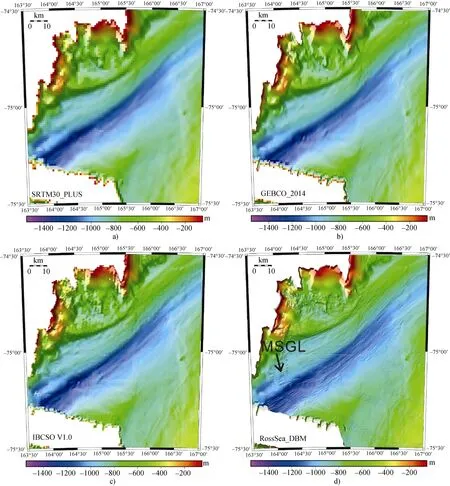
图6 西罗斯海德里加尔斯基盆地不同种类数字水深模型比较Fig.6.Different kinds of digital bathymetric model for Drygalski Basin, West Ross Sea
3 结论与展望
本文制作的罗斯海数字水深模型中被多波束水深数据覆盖的区域网格间距为50 m, 其他区域网格间距为30弧秒。对于50 m网格间距的区域, 海底地形地貌特征非常明显, 古冰川进退形成的海底冰川地貌清晰可见, 可满足罗斯海海底冰川地貌的解释工作及综合地质地球物理研究任务。
虽然目前罗斯海的多波束水深数据覆盖面积较小, 但是, 随着国内外南极科考的不断深入, 装备多波束回声测深声纳系统的破冰船投入使用(比如, 雪龙号于2017年装载了SeaBeam 3020型多波束测深仪, 在第34次南极科学考察中, 我国首次在罗斯海进行了多波束海底地形地貌的调查), 采集到的越来越多的高分辨率多波束水深数据可以不断融合到本文的罗斯海数字水深模型中, 直至实现罗斯海多波束水深数据的全覆盖。
