新型轮腿式挖沟机的动力学建模与仿真
2018-12-25潘克强周知进黎书文
潘克强,周知进,黎书文,何 船
(贵州理工学院 机械工程学院,贵阳 550003)
在市区内铺设各类管道,首要任务是挖掘符合标准的沟渠,如果沟渠的参数(直线度、深度的一致性)不能得到保证,管道在实际的应用中就会在短时间内失效破裂或堵塞.因此,挖沟机在高低不平的复杂地形环境中开展挖掘工作,支撑驱动系统是挖沟机最关键的组成部分,其功能、适应性直接关系到挖沟的品质和效率.支撑驱动系统包括单独驱动、转向和定位的车轮以及自适应地形地貌的悬架,既是挖沟机的重要组成部分,又是挖沟机适应地形性能的综合体现.
国外现在的挖沟机都是体积庞大的履带式挖沟机,不太适合在复杂的城市空间进行沟渠挖掘.国内通常采用挖掘机开沟或者人工挖掘,挖掘机通常不太适合对复杂的城市空间进行沟渠挖掘,人工挖掘不但效率低,而且沟渠的品质很难得到保证.因此,研发一款体积小、适应性强的小型挖沟机很有必要[1].
1 挖沟机支撑移动系统的参数设计
性能优越的挖沟机应该具有良好的爬坡、跨越障碍物、抗倾覆等越障性能,良好的越障性能可提升挖沟机车体的稳定性,保证在水平或者斜面上工作时的沟渠挖掘品质.本文提出并设计了一款新型轮腿式[2]挖沟机,综合了轮式和腿式行走机构[3]的优点,可根据地形地貌灵活调整车体姿态[4],有很强的地形地貌适应能力、越障能力和保持车体足够稳定性的能力[5-6].
在概念设计阶段,越障能力对挖沟机的整体设计是一个很重要的指标,利用Bekker[7]越障理论公式:
(1)
式中:h为越障高度;d为车轮直径;α为常数;l为车的长度;w为车的宽度.
轮腿机构设计应满足以下要求:结构简单,可以快速灵活地实现单个轮腿的升降,从而稳定挖沟机车体姿态,保证挖沟机工作部件运行平稳、工作可靠.
同时为保证挖沟机能够正常越障,车体与地面的最小离地间隙应作为重要参数进行考虑,可以得到如下安全的离地间隙[8],即
(2)
式中:dh为障碍物在复杂定性地貌的投影直径.
挖沟机的稳定性是决定挖沟品质的重要因素,贯穿挖沟机的整个开发、设计的生命周期.轮腿式挖沟机的稳定性可以用重心投影到行驶地面上的点与轮子接触点之间的距离来表示(重力稳定域)[9].挖沟机在斜坡(见图1)或者斜面上(见图2)工作时,保证挖沟品质的车身状态如图1和图2所示.
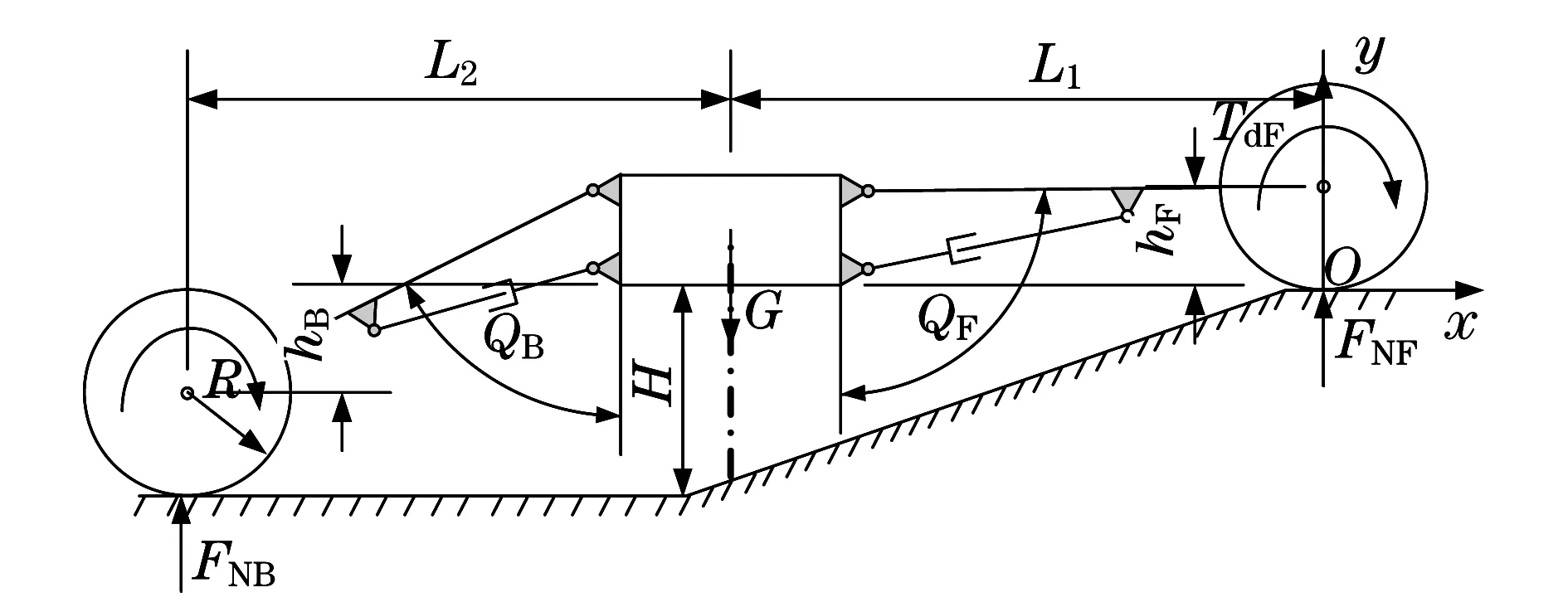
图1 挖沟机在上下斜坡的力分析Fig.1 Force analyses on slope of trencher

图2 挖沟机在斜面的工作状态Fig.2 Force analyses on the inclined plane of trencher
根据上述参数要求,通过分析常用形式的机构,从平面四杆机构入手进行分析,设计出机械本体由车体平台和轮腿移动机构两部分构成的四轮腿挖沟机,机构如图3所示.当挖沟机遇到障碍时或者在高低不平的地面行走时,通过改变正向或侧向轮腿的夹角,从而达到调节、稳定车体姿态的效果,使得挖沟机具有更强的适应性、机动性和越障能力.

图3 轮腿式挖沟机三维模型Fig.3 3D model of wheel-legged trencher
2 基于Solidworks的挖沟机三维建模
利用Solidworks 2012软件建立挖沟机的三维仿真分析模型,其基本参数:挖沟机原理样机质量为2 000 kg,长度Lmax=4 532 mm,宽度Wmax=1 485 mm,高度Hmax=1 540 mm,车轮直径为R=304.8 mm.根据上述参数建立仿真分析模型如图3所示,该三维模型的外形尺寸、质量分布等均按原理样机实际参数设定,同时,考虑到车轮与接触地面情况比较复杂,选择沙石简易铺装路面为模拟地面,即挖沟机在仿真运行过程中为刚性地面相互作用,在高低不平的地面行走时车轮与地面具有一定的冲击.
3 基于ADAMS的挖沟机仿真分析
将通过Solidworks 2012建立的轮腿式挖沟机x_t格式三维模型导入ADAMS中,对其各部分施加相应的运动副及联接,并建立模拟地形地貌的地面环境,设置有长距离、大角度的上下斜坡障碍和不同高度单侧的局部障碍等非结构化形体.建立地表与挖沟机轮胎的相互作用模型,设置轮胎与地面的滑动摩擦系数fs=0.9,滚动摩擦系数f=0.55.对轮腿式挖沟机工作运动过程进行仿真分析,根据姿态设计参数(通过改变液压缸移动副长度0~210 mm,其最大越障高度理论单向可达到1 200 mm,综合工作情况越障高度设置为600 mm)设定、调节挖沟机各个运动副的参数(见图4),使其满足设定姿态的条件.进行ADAMS仿真分析,获得挖沟机车体、车轮的运动特性曲线如图5所示.
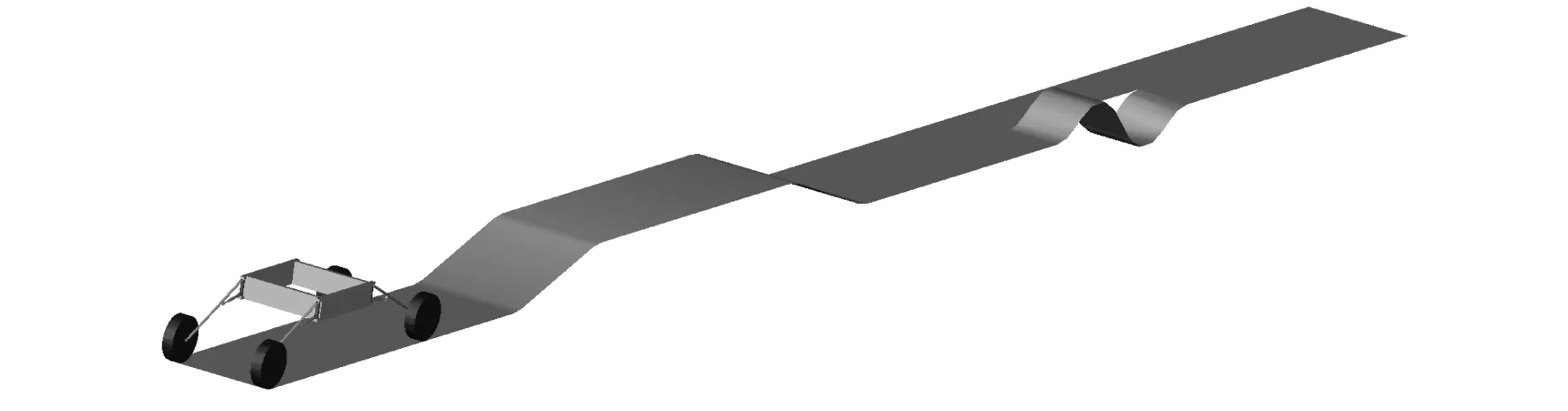
图4 挖沟机仿真环境设置Fig.4 Simulation settings of trencher

图5 挖沟机仿真运动特性曲线Fig.5 Simulation characteristic curve of trencher
图5(a)为挖沟机在复杂地形地貌工作时,在载荷作用下车体的水平位移、质心高度、速度及动能曲线变化.通过曲线图,即使行进方向有大角度斜坡,车体在高度方向也没有任何姿态变化,表示在工作过程中能很好地保证挖沟深度,并随着挖掘泥土的深度平缓而改变行进速度,提高挖沟品质.
图5(b)~图5(e)为挖沟机在复杂地形地貌工作时,除了整车需要经过斜坡障碍外,单侧车轮经过障碍的水平位移、质心高度、速度、角速度、车轮与地面的接触力曲线变化.通过曲线图,结合图5(a),即使行进方向有大角度斜坡和单侧障碍,除了在极限环境(正弦障碍)下有一定的冲击外,在行进时车轮始终与地面保持很好的接触和速度控制,显示出轮腿结构有很好的地形地貌适应性,从而保证了挖沟机工作的稳定性.
4 结语
对挖沟机进行了原理样机设计,并分析了需要考虑的基本性能指标,提出了轮腿式挖沟机的构型方案,最后通过Solidworks进行基本构型参数设计,用ADAMS仿真软件对挖沟机进行运动特性仿真分析,得到了挖沟机各部件的运动特性参数曲线,包括车体、车轮的位移、速度、加速度和角速度、角加速度和动能等特性曲线.仿真试验证明:该构型完全满足设计要求,并显示出轮腿式挖沟机在复杂地形地貌下具有良好的稳定性和适应性,为挖沟机的整车结构设计提供了理论依据.
