一种基于形态学与区域分析的车牌定位方法
2018-12-24罗山
罗 山
(攀枝花学院交通与汽车工程学院,四川 攀枝花 617000)
0 引言
车牌定位是车牌识别系统中至关重要的环节,车牌的准确定位直接决定着后续的识别效果。目前应用较多的车牌定位方法有数学形态学法[1]、区域标记法[2]、投影法[3]、多特征提取法[4]、遗传算法[5]、神经网络算法[6]、变换法[7]和AdaBoost算法[8]等。这些方法各有优缺点,适用于不同的场景。
针对单一定位方法存在的问题,结合数学形态学边缘检测具有抑制噪声能力和便于区域提取的优势,在连通区域分析的基础上,提出一种基于数学形态学与区域分析的车牌定位方法,其流程如图1所示。
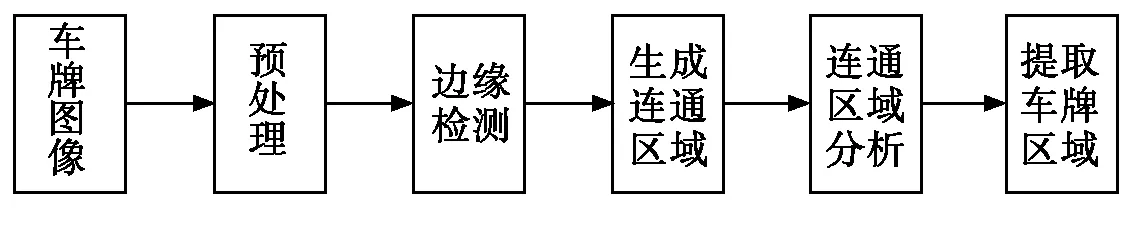
图1 车牌定位流程
1 车牌图像预处理
车牌图像在采集过程中由于光照变化、车牌污损、背景复杂等因素导致质量下降,这对定位的准确性有很大的不利影响,为改善图像质量,提高定位的准确率,需要对采集的车牌图像进行预处理。图像预处理主要包括灰度化、去噪、对比度增强等。图2是在相对运动情况下采集的待定位车牌图像,车牌图像存在一定程度的模糊,对精确的定位有一定的干扰。经预处理后的图像如图3所示,可见处理后噪声明显减少、对比度得到增强。
2 数学形态学处理
2.1 边缘检测
基于数学形态学的边缘检测抑制噪声能力比基于微分算子强,提取的边缘比较光滑连续,且运算简单。数学形态学有膨胀、腐蚀、开启和闭合四种基本运算。设A表示目标图像,B表示结构元素,z表示平移量,则有以下定义:
2) 腐蚀运算:AΘB={z|(B)z⊆A}
3) 开启运算:A∘B=(AΘB)⊕B
4) 闭合运算:A·B=(A⊕B)ΘB
将基本的形态学运算进行组合,可构造出形态学边缘检测算子,常见的算子[9]有:
1)E=(A∘B)⊕B-(A∘B)·B
2)E=(A·B)∘B-(A·B)ΘB
3)E=(A∘B)⊕B-(A·B)ΘB
其中E为边缘检测图像。本文采用抗噪膨胀腐蚀型算子3)对预处理后的车牌图像进行边缘检测,这里选择3×3的方形结构元素。得到的边缘图像如图4所示。

图2待定位车牌图像
图3预处理图像
图4边缘图像
2.2 生成连通区域
膨胀是将物体周围的点合并到该物体中,能缩小或者填充比结构元素小的孔洞,它也可以连接断开的物体,形成连通区域。腐蚀是消除物体的边界,具有细化或者收缩物体作用,它还可以滤除小于结构元素的物体。闭运算具有填充比结构元素小的孔洞,弥合狭窄的间断等作用。开运算具有平滑物体轮廓、消除小于结构元素的物体和细的突出物等作用。与腐蚀和膨胀运算相比,开运算与闭运算能更好地保持目标物体的大小。
结合各种运算的特点,经过反复实验,本文选用长度为3的垂直线形结构元素进行腐蚀运算,再对腐蚀后的图像采用[25×25]的方形结构元素进行闭运算,经形态学处理后,车牌图像中每个白色连通区域即为车牌候选区域,如图5所示。
2.3 去除小区域
由于车牌图像背景复杂,车牌候选区域中存在许多不是车牌区域的孤立小区域,可将这些小于车牌区域面积的非车牌小区域去掉,以减少车牌候选区域数目,以减少运算量。在此,利用Matlab函数bwareaopen来去除小区域,其参数P的取值可根据车牌区域面积进行试验确定。去除小区域后的结果如图6所示。
3 连通区域分析
去除小区域后,减少了车牌候选区域,对剩下的候选区域进行分析,比较分析区域参数以去除伪车牌区域。求每一个候选区域的最小外接矩形的宽度和高度,利用车牌区域宽度、高度及宽高比在一定的范围之内这一几何特征,剔除不满足条件的区域,从而找出真实的车牌区域。
基于区域分析提取车牌区域算法步骤为:1) 标记每个连通区域;2) 提取标记区域的属性;3) 记录每个标记区域的最小外接矩形的宽、高和坐标;4)利用车牌区域的宽高比为定值,结合车牌区域的高度,提取出车牌区域。
我国车牌区域宽度与高度一般分别为440 mm与140 mm,宽高比约为3.14,考虑到车牌倾斜等情况,经过反复实验,取区域的宽高比阈值区间为[3,4]。对区域进行筛选,剔除宽高比不满足此条件的区域。另外,考虑到宽高比虽然满足此条件,但高度或宽度不等于实际的车牌高度或宽度的区域的情况,因此还需剔除高度或宽度不满足实际车牌尺寸的区域,本文选取高度进行比较判定。经过两次筛选,则同时满足宽高比和高度条件的区域即为真实的车牌区域。提取的车牌区域如图7所示。

图5 车牌候选区域图6 去除小区域图7 提取的车牌区域
4 实验结果与分析
在Matlab平台中对不同环境下的车牌图像进行实验仿真测试本文算法的有效性。图8给出了精确定位的部分车牌图像,图8(a3)、(b3)、(c3)和(d3)分别是在雾天、夜晚、光照强烈和存在倾斜的情况下采集的车牌图像的定位结果。可以看出,在几种常见复杂环境下的车牌图像的定位效果好,车牌切割完整准确,残损很小。实验结果表明本文算法能够有效地实现车牌定位,准确率高,速度快。

图8 提取的车牌
5 结束语
本文对传统单一的车牌定位方法存在的不足进行研究,数学形态学方法具有较强的抗噪声能力,但获得的连通区域中存在很多伪车牌区域,为减少伪车牌区域对精确定位的干扰,通过去除小区域处理去除大部分伪车牌区域,通过区域分析得到反映车牌特征的区域参数,利用区域参数进行两次筛选剔除宽高比和高度不满足条件的区域,得到真实的车牌区域。实验表明该方法克服了单一车牌定位方法存在的不足,能从背景较为复杂的车牌图像中快速准确地提取出车牌,为后续的车牌字符分割与识别奠定了良好的基础。
