基于双目立体视觉的采摘机器人设计
2018-12-21杜枭雄张鹏超姚晋晋
杜枭雄 张鹏超 姚晋晋 王 彦
(1.陕西理工大学机械工程学院,陕西汉中723001;2.陕西理工大学陕西省工业自动化重点实验室,陕西汉中723001)
0 引言
农业劳动力的匮乏,在一定程度上致使果蔬无法得到及时采摘,从而给农业生产带来了巨大损失。因此,迫切需要深入开展采摘机器人相关理论与技术的研究。本文基于机器视觉技术设计了一种智能移动式水果采摘机器人[1],集可移动平台、机械手臂、气动采摘吸盘及智能控制模块于一身。通过双目立体视觉技术,实现了水果采摘机器人自主移动行走、避障及果实定位识别的功能。
1 机械本体及硬件系统设计
初步设计车体结构如图1所示。
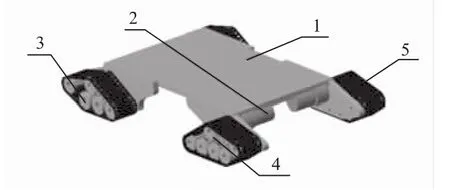
图1 采摘机器人移动平台车体结构
2 移动平台控制系统设计
本设计采用STM32F103作为主控制芯片,该芯片融高性能、实时性、数字信号处理、低功耗、低电压等优点于一身,同时保持了高集成度和开发简易的特点。
2.1 主控单元
本系统选用STM32F103芯片作为采摘机器人移动平台的中央控制器,完成传感器信息收集、电机控制、外部通信扩展等任务[2]。
2.2 电机驱动模块
在综合考虑电机驱动机器人的承载能力、驱动转矩、转速及功率等技术指标的基础上完成对直流电机的选型,并且在机器人机械结构中通过增加减速装置来进一步提高驱动转矩,最终选择直流电机型号为GM25-370-2414-75-14.5D10。表1为直流电机主要技术指标参数。

表1 直流电机主要技术指标参数表
2.3 红外寻迹模块
本文设计的采摘机器人在设置的黑带轨道上行驶,三对红外收发管安置于车体前部并对地,与地面相隔1 cm左右,根据接收到的反射光线强弱来判断是否在轨迹上。光电传感器实现循迹的基本电路如图2所示。
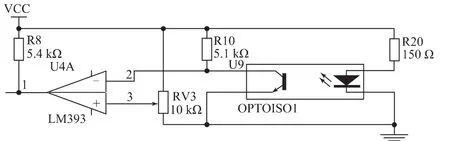
图2 循迹电路图
2.4 超声波测距模块
考虑到采摘机器人行驶过程中可能存在障碍,因此在采摘机器人行驶过程中必须进行避障处理。
2.5 无线通信模块
通过无线接收模块来实现下位机与上位机之间的通信,可在复杂环境中保证其行进的安全性。
2.6 WiFi服务程序设计
WiFi服务系统由主控部分、避障传感器、摄像头、机械臂等部分构成,主控部分采用STM32F103+ESP8266构成。通过主控把采集到的摄像头信息上传到PC端,然后PC端显示采摘机器人实时视频信息。STM32通过USART2与ESP8266通信,原理图如图3所示。
3 软件系统设计
本设计的软件系统为上位机+下位机的设计框架,上位机通过接收双目视觉模块采集的图像对目标进行识别与定位,然后根据目标定位数据,结合摘机械臂的模型参数和运动学的模型,进行机械手定位采摘目标逆运动学求解及轨迹规划,解算出机械手到达目标姿态对应的关节动作角度。并通过调用串口通信类与运动控制器MCU通信,将关节动作数据传递给运动控制器MCU。
3.1 目标果实的检测与定位
识别的首要任务是进行果实图像样本的采集,需要依靠CCD摄像机拍摄完成,根据图片信息建立完整的果实样本;其次是建立颜色模型,采用图像分割技术将果实与其周围生长环境分开,识别果实本体,并通过三原色RGB对比计算,判断目标果实的成熟度[3]。
3.2 双目视觉空间定位原理
采摘机器人进行采摘作业的前提是先识别成熟果实及确定其三维位置,对果实成熟率的识别和定位,极大程度地影响了采摘的成功率,然后通过WiFi模块将图像采集信息传送至工控计算机,根据形成的三维图像,进而实施准确采摘。
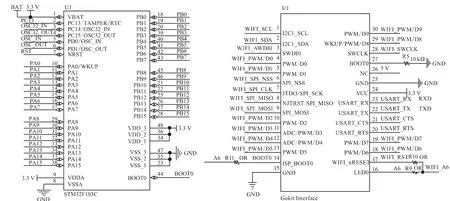
图3 STM32和ESP8266原理图
4 结语
采摘机器人的控制部分采用ARM+PC的控制方式,搭载了四自由度的机械臂。通过采用移动平台来搭载机械手,可以使采摘机器人活动范围更加灵活。
