书法机器人工作站的设计与仿真
2018-12-21林雁飞朱洪雷
林雁飞 朱洪雷
(广州工程技术职业学院,广东广州510520)
0 引言
《中国制造2025计划》将机器人作为重点发展领域,而国家“十三五”规划中,也将“智能制造和机器人”列为“科技创新重大项目”。将工业机器人与智能制造相结合,改变了传统工业机器人只能进行重复操作的观念,为工业机器人的发展开辟了新的思路。近年来,工业机器人的创新应用成为热点,如机器人表演茶道、机器人拧魔方、机器人写书法等等。
ABB RobotStudio离线编程软件采用ABB公司的VirtualRobotTM技术[1],来对工业机器人的工作站进行虚拟现实的构建,通过可视化及可确认的解决方案和布局来获得实际产品的可行性分析,是一款应用很广的ABB工业机器人专用仿真软件。本文基于RobotStudio6.07仿真软件,选取ABB IRB120机器人进行工作站的布局。
1 书法机器人工作站布局
结合书法机器人的工作特性,本设计选取了ABB机器人中最小但速度最快的ABB IRB120六轴机器人[2]。由于书法机器人工作站的特殊性,软件系统中现有的夹具等配件不能满足设计的需求,需采用第三方绘图软件进行创建,并采用ACIS文件导入系统,RobotStudio与之具有兼容性。该工作站采用Solidworks绘图软件创建的部件包括:毛笔夹具、毛笔、纸、书桌、砚台以及用于装饰的屏风、盆栽、地板等等,如图1所示。
2 书法机器人路径编程

图1 书法机器人工作站布局
书法机器人与单片机等嵌入式系统的书写原理不同,其控制系统中不具有字库,无法采用调用中文字库的方式书写,主要是采用模拟汉字笔迹进行路径规划的方式进行汉字书写,因此,预先需制作文字模板。这种方式的优点在于机器人可以模拟各种类型的字体,也可以将个人书写的作品扫描导入进行规划模拟。由于汉字路径规划不具有规律性,故采用手动示教的方式完成[3],并对每个汉字的路径设置子程序便于调试,如图2所示。

图2 书法机器人路径规划
3 书法机器人工作站的仿真
工作站路径编程完成后,要进行仿真演示,来展示工作站的运行情况。一般工作站的仿真直接用软件的仿真功能运行就可以了,但书法机器人采用的毛笔是虚拟元件,仿真时只有书写的动作,却不能在纸上真正留下墨迹,这是本设计的一个难点。
针对路径规划类工作站,传统的仿真方法多采用TCP跟踪的模式。TCP(tool centre position)即工业机器人工具中心位置点,该方法是对工具(即毛笔)中心位置进行追踪,在仿真过程中将毛笔中心点所经过的路径用线条勾画出来,如图3所示。

图3 TCP跟踪模式仿真设置及效果
从仿真的结果可以看出:毛笔所有经过的位置,包括机器人机械原点、笔画之间的连接、字与字之间的连接等路径全部都有线条显示;但仿真结果无法确认字迹是否写在纸上,或是纸上是否有多余字迹,最重要的一点是,这个字迹非常潦草,无法体现书法作品的美感和内涵。
基于传统方法的缺陷,本次设计引入一种创新的仿真方法,即基于Smart组件的动态仿真方法。具体仿真方法如下:
(1)在Solidworks软件中创建一个由多个小组件拼接而成的纸板,组件越小仿真精度越高,并将其导入RobotStudio工作站系统中。
(2)在RobotStudio6.07的建模—Smart组件—组成—添加组件中,添加LineSensor线传感器组件和Sink删除组件,设计思想是将线传感器安装到毛笔的末端,当毛笔书写接触到纸时,线传感器将会发出一个触发信号给Sink,执行删除组件的命令,纸上对应位置的小组件被删除,露出字迹。
(3)在运行过程中,可能出现因为机器人运行速度过快信号反应不及,对应位置的小组件无法正常删除的情况,为保证可靠性,引入Timer组件,将间隔时间Interval设置为0.005 s,即当毛笔在纸板对应位置停留时间超过0.005 s,也能发出触发信号给Sink。
(4)对Smart组件逐步完成组成(图4)、属性与连结(图5)以及信号与连接(图6)的设置,完成仿真的动态程序设置。

图4 Smart组件组成设置
仿真结果如图7所示。
4 结语

图5 Smart组件属性与连结设置

图6 Smart组件信号与连接设置
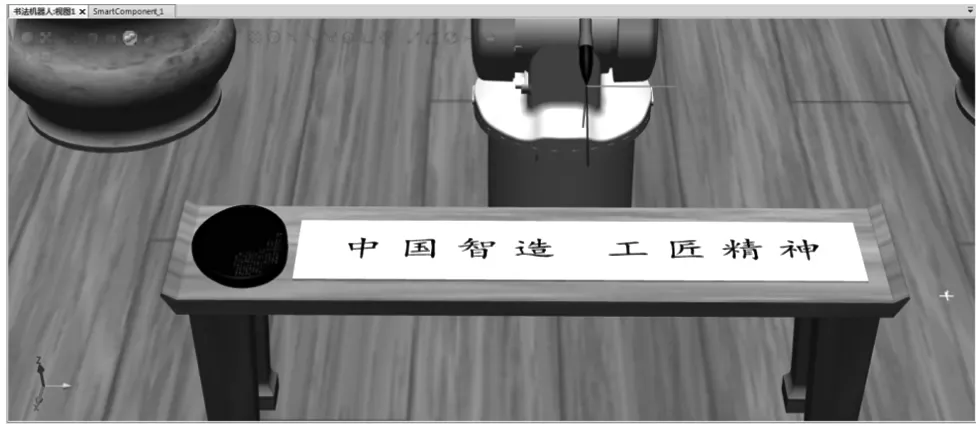
图7 Smart组件控制方式的仿真结果
综上所述,采用Smart组件的动态控制方法,能清楚地展示机器人书写的汉字,并且该汉字是真正能出现在纸上的,对于书写过程的缺笔画、多笔画以及书写的力度、角度等都能较好地展现,便于调试与修正。
