挂轨式巡检机器人综合管理平台开发与应用
2018-12-21宋庆武官国飞
宋庆武 蒋 超 官国飞
(江苏方天电力技术有限公司,江苏南京211102)
0 引言
随着国家电网的发展及电力技术的进步,变电站、配电所的信息化、智能化水平不断提高,500 kV以下电压等级变电站和配电所基本实现了无人值守运行,未来500 kV及以上变电站也将普及无人值守运行;站内电气设备运行监控及动力环境监测主要依靠远程在线监测系统及定期人工巡检来实现;传统的在线监测布点有限、施工繁琐,在部分带电区域、环境恶劣区域后期设备维护较为困难;随着电网规模的不断扩大,人工巡检的工作量也在进一步加大,容易产生因人力资源、设备资源有限引起的人工巡检不到位等情况。为了应对运维工作的现状,结合机器人技术的不断发展,近年来巡检机器人得到了广泛的应用,逐渐替代了人工巡检方式,实现了远程监控、分析运行中的电气设备、母线及其引接导线的实时状况,监测电气节点的发热温度、变压器的油温/油位等数据。
长时间的实际应用证明了机器人巡检的经济效益和安全价值,机器人巡检工作未来将会起到越来越重要的作用。变电站、配电房室内存在大量重点监控区域,目前运维工作主要依靠人工巡检,变电站及配电房分布范围广、数量多、巡检区域众多,人工巡检的方式存在着人手不足、巡检不到位等实际情况;在电力管廊等环境恶劣、空间狭小的区域一般人工巡检难以覆盖,容易发生安全生产事故。而国内现有巡检机器人产品在应用上有很多不足,产品结构和功能比较单一,不能适应多种环境、多种应用场景的实际业务需求;与之配套的管理系统多为单站单套系统应用,应用面较窄,不能实现集中管理、多系统互动等功能,监测数据的价值和监测设备的能力没有得到全面发掘。
1 总体架构
如图1所示,挂轨式巡检机器人综合应用平台运行于信息内网,由挂轨式巡检机器人应用系统、统一接口平台、自部署巡检机器人、第三方巡检机器人组成。

图1 挂轨式巡检机器人综合应用平台总体架构
挂轨式巡检机器人应用系统功能包括对采集数据的存储、分析、展示,对机器人的远程控制、告警联动;自部署巡检机器人通过电力载波通信与统一接口平台通信,负责根据自动巡检任务或手动巡检命令运行至监测点,采集数据上报应用采集服务器;第三方巡检机器人、外部系统通过统一接口平台建立与挂轨式巡检机器人[1]应用采集服务器的双向通信。
根据系统业务架构和应用架构的分析,对系统的应用功能进行细分,结合系统物理架构进行了应用功能部署的设计。巡检机器人综合管理平台支持两级部署,既能满足站内本地操作需求,又能集中管理辖区部署的机器人,实现数据的集中存储、统一管理。
2 业务功能描述
(1)开发挂轨式巡检机器人综合应用平台,实现远程控制、监测和评估机器人的实时运行状态,制定并下发自动巡检方案,实现7×24 h往复式巡检,通过机器人云台采集装置采集现场图像,传输至管控平台进行存储和分析,实现对保护、测控、通信等厂站设备的指示灯状态、压板状态和表计读数的智能判断,对有异常的分析结果及时上报平台;制定统一接口规范,支持第三方机器人产品接入,统一协调管理。
(2)试制适合变电站室内区域使用的挂轨式巡检机器人,集成可见光、温湿度、氢气、氧气、烟雾、噪声等各种监测装置,满足变电站室内设备巡检和智能分析的要求。
(3)研究现场异常和事故信息快速收集机制,将发生异常和事故的时间、地点、环境状况[2]、现场图像分析结果等内容整理为分析报告,存入知识库,结合其他外部系统数据,实现归纳不同条件和因素下各种设备的故障数据趋势等多种高级应用,为设备运行维护工作提供有效的数据支撑。
(4)结合现有电网调度相关业务系统、辅助监控系统的运行[3],获取室内环境、空调运行状态、风机运行状态等数据,同时向其他系统提供巡检机器人采集分析数据,实现系统间互动互通、数据共享;在其他系统出现告警时,通过数据共享,获得告警位置、类型等信息,巡检机器人可前往告警地点,将可见光、热成像等信号实时传输至管控平台,缩短告警处理时间,在出现误告警时可避免浪费人力资源,出现真实告警时,处理人员可提前熟悉现场情况,提高处理效率。具体实现功能如图2所示。
3 结语
本项目通过对室内挂轨式巡检机器人及其管控平台的应用研究,研发机器人巡检管控平台,制定统一接口规范,将符合规范要求的第三方机器人产品纳入平台管理;结合省内现有监控类系统,研究巡检机器人在数据共享、告警联动等方面的应用。
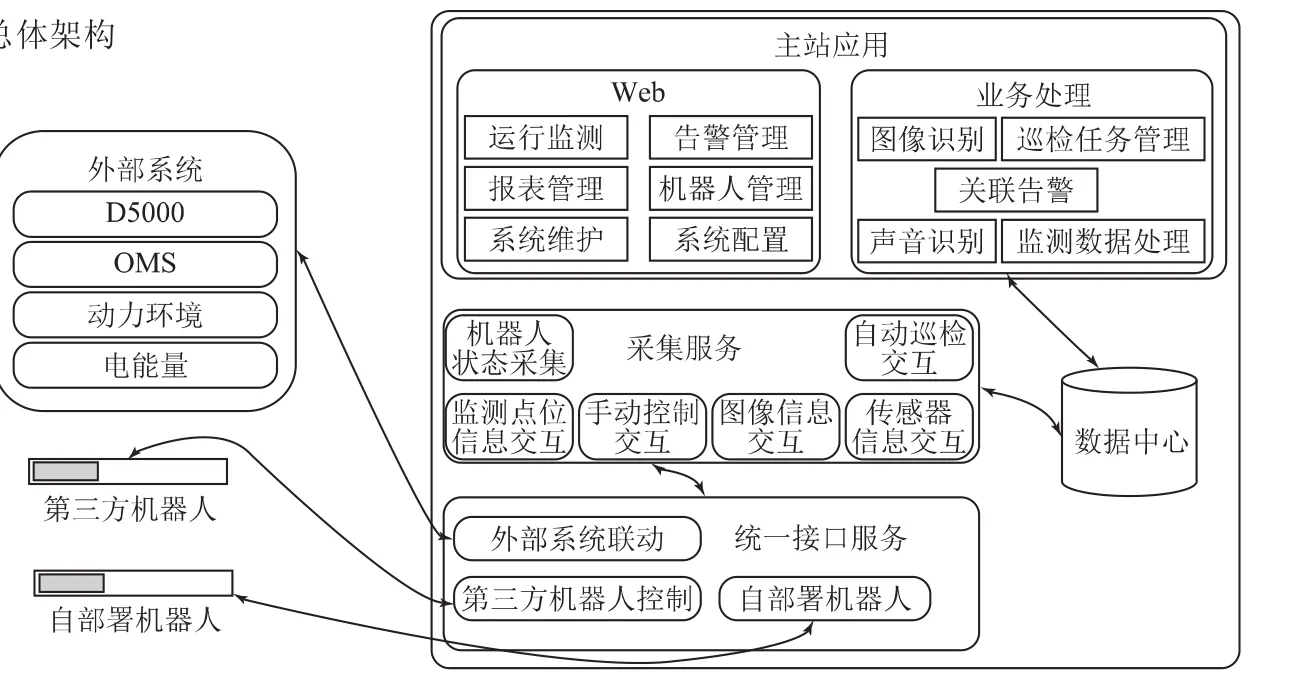
图2 具体实现功能
通过本项目的研究,能够降低设备故障和动力环境变化对电网运行的影响;通过与安防、消防等系统的有机结合,更好地发挥巡检机器人在现场的作用,切实保障电力安全生产,提高生产效率,减少财产损失,节约人力资源成本。
