通用型工业机器人拖动示教臂系统的研究
2018-12-21邰文涛
邰文涛 芮 鹏
(哈工大机器人集团股份有限公司,黑龙江哈尔滨150000)
0 引言
工业机器人能够替代人工进行某些单调、繁重和重复的长时间作业或是危险、恶劣环境下的作业,其通用性强,生产效率高,产品质量能够得到保障。工业机器人的操作示教方式多种多样,本文将概述现有市场的示教编程方式并设计出一套新型的拖动示教系统。
1 离线示教编程
离线编程是通过软件,在电脑里重建整个工作场景的三维虚拟环境,然后软件可以根据要加工零件的大小、形状、材料,同时配合软件操作者的一些操作,自动生成机器人的运动轨迹,即控制指令,然后在软件中仿真与调整轨迹,最后生成机器人程序传输给机器人。离线编程克服了在线示教编程的很多缺点,充分利用了计算机的功能,减少了编写机器人程序所需要的时间成本,同时也降低了在线示教编程的不便。目前离线编程广泛应用于打磨、去毛刺、焊接、激光切割、数控加工等机器人新兴应用领域。
离线编程有以下优点:
(1)能够根据虚拟场景中的零件形状,自动生成复杂加工轨迹。
(2)可以控制大部分主流机器人。
(3)可以进行轨迹仿真、路径优化、后置代码的生成。
(4)可以进行碰撞检测。
(5)生产线不需要停止运行。
离线编程有以下缺点:
(1)对于简单轨迹的生成,它没有示教编程效率高,例如在搬运、码垛以及点焊上的应用,这些应用只需示教几个点,用示教器很快就可以搞定,而对于离线编程来说,还需要搭建模型环境,如果不是出于方案的需要,显然这部分工作的投入与产出不成正比。
(2)模型误差、工件装配误差、机器人绝对定位误差等都会对其精度有一定的影响,我们需要采用各种办法来尽量消除这些误差。
2 示教器示教编程
通过操作示教盒,或由人工导引机器人末端执行器,使机器人完成预期的动作,以获取作业轨迹。相对于离线编程实用性强、操作简便,因此大部分机器人都采用示教编程。示教是一种机器人的编程方法,分为三个步骤:(1)示教;(2)存储;(3)再现。例如焊接机器人,它是按照事先编辑好的程序运动的,这个程序一般是由操作人员按照焊缝形状示教机器人并记录运动轨迹而形成的。目前,不像数控机床那样有APT语言,机器人编程还没有公认的国际标准,各制造厂商有各自的机器人编程语言。
以ABB示教盒在线示教为例进行分析:ABB示教盒应用程序由主模块和程序模块组成,主模块包含主程序,程序模块包含程序数据和完成特定任务的例行程序。系统模块包含系统数据和例行程序,所有ABB机器人都自带两个系统模块:USER模块和BASE模块,使用时对系统自动生成的任何模块不能进行修改。
通过对ABB机器人示教盒示教编程的分析,可以发现示教编程有以下优缺点:
优点:编程门槛低、简单方便、不需要环境模型;对实际的机器人进行示教时,可以修正机械结构带来的误差。
缺点:
(1)示教在线编程过程繁琐、效率低。
(2)精度完全是靠示教者目测决定的,而且对于复杂的路径示教在线编程难以取得令人满意的效果。
(3)示教器种类太多,学习量太大。
(4)示教过程容易发生事故,轻则撞坏设备,重则撞伤人。
(5)对实际的机器人进行示教时要占用机器人。
3 牵引示教
牵引示教是指示教者在机器人末端上施加一定方向的力,通过电流检测输出6个分量的数据,指挥机器人做相应的动作,然后记录位置,完成示教工作。广泛应用于机器人手术、机械手臂研究、手指力研究以及精密装配、自动磨削、轮廓跟踪、双手协调等作业中,涉及航空航天、机械加工及汽车等各种行业。
牵引示教也称为“力反馈示教”,其本质是一种柔顺控制,即让机器人在用户面前表现得似温顺的绵羊,用户可以轻松随意指挥它运动。目前市面上流行的解决方案是基于电流环开环控制,它的基本思路是使电机工作在电流环,电机尽量补偿系统的重力矩及摩擦力矩,然后用户就可以轻松地拖动机器人,这种方式很直观。图1是一个简化的机器人关节模型,其中的弹簧相当于力矩传感器,初始时关节处于静止状态。
现在在连杆中施加外力矩τl,该力矩引起连杆运动,此运动可以很快地传递到弹簧(力矩传感器)处。该力矩通过弹簧后继续往后传递至减速器端,并尝试推动减速器反向转动,但由于减速器静摩擦力的作用,外力矩τl继续增大,当大到超过了减速器的最大静摩擦力时,减速器才会运转,电机转子也跟着运动起来,这时候,电流环才感知到了外力矩。
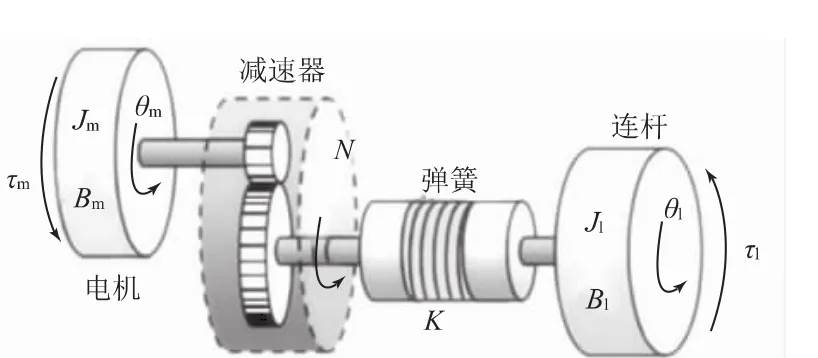
图1 机器人关节简化模型
基于此理论模型,工程师提出了一种基于力电反馈控制的拖动示教,其基本思路是通过滤波器估计出用户力矩,再通过导纳控制实现系统柔顺性。
牵引示教有以下优点:使用简单方便,不需要环境模型,适用于各种复杂表面及结构造型。
牵引示教有以下缺点:机器人本体成本过高,对检测传感器的精度要求高,机器人本体负载能力小。
4 通用型示教臂系统的研究
4.1 示教臂系统的研究概述
依据工业机器人理论建立示教臂运动学模型,求解运动学方程,实现示教臂关节信息到末端执行器位姿状态的转换。考虑到机械加工和装配引入的误差,建立示教臂机械误差补偿模型,实现对示教臂运动学模型参数的修正。通过对执行器末端偏移坐标系的分析,优化其坐标系校准模型,完成执行器末端坐标系快速校准工作。设计示教臂本体结构,优化示教臂结构参数和性能,从而实现通用性示教臂的设计与研究。
4.2 机器人示教臂齐次变换矩阵
任何一种物体在空间的位置和姿态都可以用齐次矩阵来表示,工业机器人运动的齐次变换矩阵如下:

本台示教臂机器人各轴尺寸如图2所示。

图2 示教臂机器人模型参数(单位:mm)
本台示教臂各关节旋转范围如表1所示。
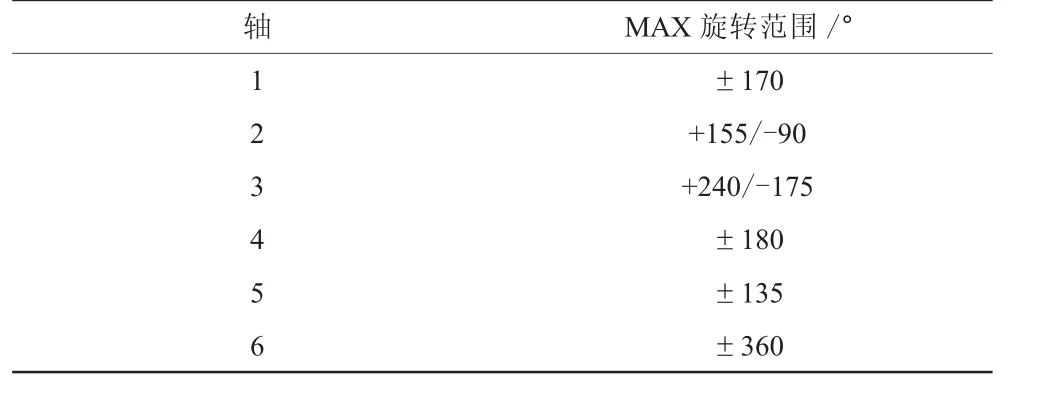
表1 示教臂各关节旋转范围
通过以上参数及机器人示教臂齐次变换矩阵可求出示教臂机器人的运动变换方程。
4.4 示教臂数据采集及软件
示教臂在各轴关节处均装有高精度绝对值型编码器,通过总线连接至PC,各轴分辨率达到80″,可精准地捕获各轴动作。同时为了进一步提高精度,采用数据采集同步技术,保证在一个数据采集周期内各轴数据均在同一时刻。
软件系统负责各轴数据采集处理、机器人程序生成下载以及机器人运行控制。采用三维视景仿真技术,可在线实时观察运行状态。
4.5 拖动示教展示
图3实际展示了示教臂机器人样机与安川机器人MH12的动态联动过程。人工拖动示教臂末端把手,在原始位置保持并停止,记为原点位置;将机器人复位至示教原点位置,即可实时动态联动效果(连续动作)。

图3 示教展示
5 结语
机器人快速编程系统正朝着一个智能化、专用化的方向发展,用户操作越来越简单方便,并且能够快速生成控制程序。同时机器人快速编程技术对机器人的推广应用及其工作效率的提升有着重要的意义,简单来说,如果没有快速编程,也许机器人还只能干搬运、码垛这些力气活,永远无法成为打磨、喷涂、雕刻行业的新生代“工匠”。
针对某些产品面多、结构复杂、型号多的特点,目前示教盒示教和离线编程这两种示教方式已难以满足产品生产的编程要求;牵引示教能够实现复杂示教,但其成本过高,负载小,并没有太多优势;而本文所述通用型示教臂示教方式能够解决以上难题,使工业机器人示教更简单、更快捷、成本更低。
