变配电巡检机器人控制系统设计*
2018-12-21吴焱明郭亚杰方明进王一鸣许钟杰
吴焱明,郭亚杰,方明进,杨 强,王一鸣,许钟杰
(合肥工业大学 机械工程学院,安徽 合肥 230009)
0 引言
目前,变配电所越来越趋向于少人化和无人化[1-3],同时,铁路系统中对变配电所稳定性的要求也越来越高,因此保证变配电所的安全运行变得越来越重要[4]。目前,许多变配电所依靠人工记录设备的运行数据,巡检结果受巡检人员的劳动强度、责任心等诸多因素限制,误检、漏检的情况时有发生[5-8]。现有的巡检机器人主要有轮式和履带式机器人[9],通过激光或者GPS定位,以非接触的检测方式来获取设备的运行状况。GPS适用于室外定位,激光定位成本比较高[10]。
因此本文设计了一种变配电巡检机器人,利用磁条和RFID标签来进行定位,将其应用于变配电所的35 kV高压室。通过搭载检测设备,以接触和非接触的方式来完成检测任务,检测结束后,对数据进行分析,将巡检结果发送到铁路后台终端。巡检机器人以自主的方式,代替人工完成对变配电所设备的状态检测与预警分析,能够及时发现设备的异常信息,为变配电所的安全运行提供了新的技术保障。
1 巡检机器人工作原理
巡检机器人主要由提升总成、小摆总成、大摆总成和磁导引AGV组成,如图1所示。提升、小摆和大摆总成各有一个搭载平台,用于搭载接触式与非接触式检测设备。
提升总成的搭载平台上安装有一台工业相机,通过伺服电机驱动线性模组实现工业相机的上下移动,利用步进电机实现工业相机的摆动,使工业相机在不同位置和不同方位拍照,从而完成指示灯的状态识别、高压电气柜柜门开闭情况的判断与指针式仪表的识别。大摆总成的搭载平台上安装有放电检测装置,通过伺服电机控制放电检测装置的位置,使其紧贴高压电气柜柜面,完成设备放电情况的检测。小摆总成的搭载平台上安装有一台工业相机,通过伺服电机控制工业相机的位置,到达指定位置后,工业相机拍照,完成数字与文字的识别。

1-磁导引AGV;2-小摆总成;3-大摆总成;4-提升总成
AGV作为巡检机器人的移动载体,通过在高压室内铺设磁条并在磁条底下布置RFID标签来控制AGV运动到不同的电气柜,利用搭载的检测设备来完成检测任务。RFID标签与磁条布置如图2所示,图中一个黑色圆代表一个RFID标签。
2 控制系统硬件组成
控制系统硬件组成框图如图3所示,由于系统需要进行大量的计算、图像处理、网口与串口的通信等,因此选择IPC作为上位机。IPC网口用来连接AGV与无线路由器,无线路由器可以将巡检结果发送到铁路的后台终端,同时连接两台工业相机、一台放电检测装置。IPC串口用来连接模拟量模块与PLC,模拟量模块上连接有温湿度传感器、烟雾传感器、风速传感器。

图2 RFID标签布局

图3 控制系统硬件组成
在进行巡检任务时,需要对多台电机进行控制,因此选择欧姆龙CP1H-X系列PLC作为下位机。CP1H-X具有4轴脉冲输出和24路输入点,PLC通过输入点来检测接近开关和按钮的信号,然后配合程序完成对应的动作。
3 控制系统软件设计
巡检机器人控制系统分为两个模块:以IPC为核心的上位机程序和以PLC为核心的下位机程序。控制系统的软件采用模块化思想来进行编写,控制系统软件的组成如图4所示。
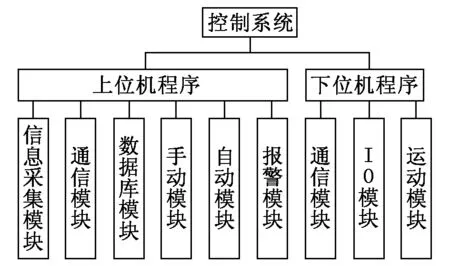
图4 控制系统软件程序设计结构
3.1 上位机程序设计
控制系统上位机程序通过C#语言开发设计,包括如下模块:
(1) 信息采集模块:主要是利用工业相机、放电检测装置和模拟量模块来采集信息。利用工业相机拍照,并存储拍摄的照片,利用图像识别技术来获取设备的信息。经过计算放电检测装置检测到的数值来得到设备的放电情况,并将数值反馈给控制系统。通过读取模拟量模块输入口的数值来得到高压室的环境数据。
(2) 通信模块:主要实现对AGV和PLC的控制。控制系统对AGV发送运动指令,驱动AGV移动到指定位置,并能够实时读取AGV的运行状态,如当前速度、当前位置、故障类型等信息。通过对PLC发送控制指令,修改电机的运动参数,使电机按照要求运动,同时PLC将电机的运行状态和输入信息反馈给控制系统。
(3) 数据库模块:为了使巡检任务具有灵活性,将一些参数,例如电机速度、报警阈值存放在数据库中,方便后期的修改。高压室由多种不同的高压电气柜组成,每面柜子的检测项目也不相同,相同柜子的检测项目也不一定相同,因此每次巡检的高压电气柜也不一定相同。为了适应现场情况,设置不同的任务类型,一次巡检任务中可以选择不同的高压电气柜,为高压电气柜设置不同的任务类型。通过使用数据库模块对初始化参数以及巡检任务进行修改,使程序更加灵活方便。
(4) 手动模块:在手动模块中可以单独测试某个硬件的功能,例如控制电机的运动、手动拍摄照片等。当系统出现故障时,通过手动模块对故障模块进行单独调试,以此来分析故障原因。
(5) 自动模块:自动运行程序可调用上位机与下位机程序来完成这一整套流程,具体的流程如图5所示。首先控制所有电机回原点,初始化数据库;然后读取数据库中目标点,驱动AGV到达目标电气柜,通过查看数据库中的任务类型,由巡检机器人根据任务类型做出相应的动作;动作完成后,对采集到的数据进行分析,如果有异常,发出报警,然后到达数据库中的下一个目标电气柜,重复上述动作,直到数据库中所有的电气柜检测完毕,生成巡检报告,并将巡检结果传送至铁路后台终端,然后巡检机器人返回到充电位。
(6) 报警模块:巡检机器人在自动巡检过程中,不可能无限制地等待某个动作的完成,因此需要设置超时报警。同时需要对故障进行分级,此处分为3级。第1级为最高等级,任务直接终止。例如:当进行放电检测时,由于放电检测装置紧贴高压电气柜柜面,如果大摆总成收回时出现故障,而此时如果AGV移动,则会损坏巡检机器人,必须停止此次巡检任务。第2等级,某一个动作发生故障,则与此故障有关的动作在后续的巡检过程中都不需要再做。例如:小摆总成摆不到位,工业相机拍摄的图片就没有意义。第3等级,某一个动作发生故障,但是与之有关的动作也有可能得到正确信息。例如:当提升总成进行指针式仪表与指示灯状态检测时,电机发生故障,但是提升总成依旧可以完成下一面电气柜的指针式仪表与指示灯的识别。对于第2与第3等级故障,由于此类型故障不影响巡检机器人的安全运行,可以继续进行巡检作业。当故障出现或者检测结果有异常时,需要进行报警提示,并记录故障信息,同时将故障信息通过路由器传送至铁路后台终端,然后派人过来维修。
3.2 下位机程序设计
PLC程序分为三个模块,分别是通信模块、I/O模块以及运动模块。
(1) 通信模块:通过接收上位机命令来控制PLC输出点的状态,实现对电机运动以及继电器的控制,PLC将伺服电机的运行状态和一些状态信息发送给上位机,实现上位机对下位机的控制。
(2) I/O模块:I/O模块分为输入与输出,输入点主要是检测接近开关与按钮的状态,通过读取输入点的状态来配合其他模块执行特定的动作,并作用到输出点上。
(3) 运动模块:PLC需要控制3台伺服电机与1台步进电机,每个电机都需要单独控制,并且可以手动控制每个电机的运行速度和目标位置。

图5 自动运行流程
4 现场调试及结果
在完成机械装配与电气设备安装工作后,设计好巡检机器人的控制系统,将巡检机器人送至合肥某变配电所的35 kV高压室,进行巡检机器人的现场调试。高压室内一共有14面高压电气柜,每面柜子的前面与背面都有检测点,具体的布局如图2所示,现场的运行情况如图6所示。经过现场调试,巡检机器人能够很好地按要求完成检测动作,检测结果与现场实际情况比较符合,巡检机器人每隔2 h完成一次巡检任务,一次巡检需要耗时18 min,满足变电所的巡检要求。

图6 自动巡检中
5 结束语
目前,变配电巡检机器人的控制系统已经研制完成,实现了对35 kV高压室内设备的自动巡检,对检测结果进行数据分析后得到报表,传送至铁路后台终端。变配电巡检机器人对于高压室的风险管控具有良好的效果,提高了设备的巡检效率和巡检质量,降低了工作强度和工作风险,为无人值守变配电所的安全运行提供了一种新型检测设备和预警手段。
