航天测量船系泊状态下惯导水平零值测量方法*
2018-12-21钟德安冯鸿奎
包 飞,钟德安,向 颉,冯鸿奎,康 凯
(中国卫星海上测控部,江苏江阴 214431)
0 引言
航天测量船惯导设备在坞内标校中通过水平取齐[1]获取水平姿态零值,但由于其本身设备的特性,在出坞后的使用过程中会发生零值漂移,零值漂移量在习惯上被称为漂移零值或者新零值,在数学上表示为动态测量残差均值。为提高测量船上雷达设备的综合外测精度,应及时修正惯导新零值。文中研究的零值测量方法中的零值指的就是取齐后产生的新零值。
在航天测量船系泊或航行等动态条件下,对航天测量船惯导设备水平零值的测量主要采用惯导设备间的相互比对法和经纬仪测星解算法[2]。惯导设备间的相互比对法属同等精度间的互比,只能定性分析问题。经纬仪测星解算法受经纬仪本身测星精度和轴系误差标定精度等因素影响,测量精度与惯导零值相近[3],达不到三分之一精度的鉴定要求。而电子水平仪静态测量精度优于1″,且本身零值修正方便,若电子水平仪的动态测量精度能优于3″,则可使用电子水平仪标定惯导的水平零位,从而及时修正惯导水平零值。
该方法的研究思路主要分为三步:
第一步:改造电子水平仪,增加动态测量功能,同时为便于与惯导数据比较还需增加外部时间同步功能。
第二步:构建电子水平仪动态误差检测系统,包括组成硬件、检测方法以及数据处理方法。
第三步:通过实验数据分析电子水平仪动态测量误差分布规律,研究惯导设备水平零值的测量方法。
1 电子水平仪改造
通常电子水平仪系统由1台计算机、1台主机和相应的传感器组成。为实现电子水平仪动态测量功能以及外部时间同步功能,研制了一台电子水平仪同步数据采集仪取代原来的主机。
电子水平仪同步数据采集仪在电路设计上采用时间同步模块、模数转化模块、控制模块和电源模块架构。电路组成框图如图1所示。

图1 电子水平仪同步数据采集仪电路框图
1)时间同步模块
时间同步模块负责解码外部B(DC)码信号,产生同步的本地时间信号与频率信号,主要采用LV4256和LPC932A1芯片完成相关功能。
2)模数转化模块
模数转化模块负责将EDA2000°水平仪传感器输出的电压信号转化为数字补码数据,主要采用AD7606- 4芯片完成相关功能[4-5]。
为预防干扰,该模块印制电路板的模拟部分与数字部分进行了分离设计,模拟部分与数字部分分割地层,模拟地和数字地通过0欧姆电阻单点连接。AD7606- 4芯片的REFIN/REFOUT、REFCAPA、REFCAPB、REGCAP引脚以及ADR421的Vin引脚采用低ESR的陶瓷电容进行去耦[6],从而降低AD7606的电源阻抗及其电源尖峰幅度,提高采样的准确性。
3)控制模块
控制模块负责按照一定的频率控制模数转化电路工作、读取时间同步电路的本地时间信息以及向外部接口发送处理好的传感器测量值、测量时间、工作状态等信息。控制模块主要采用LPC932A1芯片完成相关功能。
4)电源模块
电源模块负责提供2路15 V的传感器工作电压、1路5 V的数字电路工作电压以及1路5 V的模拟电路工作电压。
设备研制完成后进行了相关功能与静态指标测试。经过48 h测试,设备各功能正常,同步精度优于30 μs,30 min静态水平姿态测量稳定度约为0.5″。
2 电子水平仪动态测量误差检测
为研究电子水平仪系统在系泊状态下的测量误差,研究建立了一套检测系统,并进行了相关实验。
2.1 检测系统组成设计
检测系统组成如图2所示。
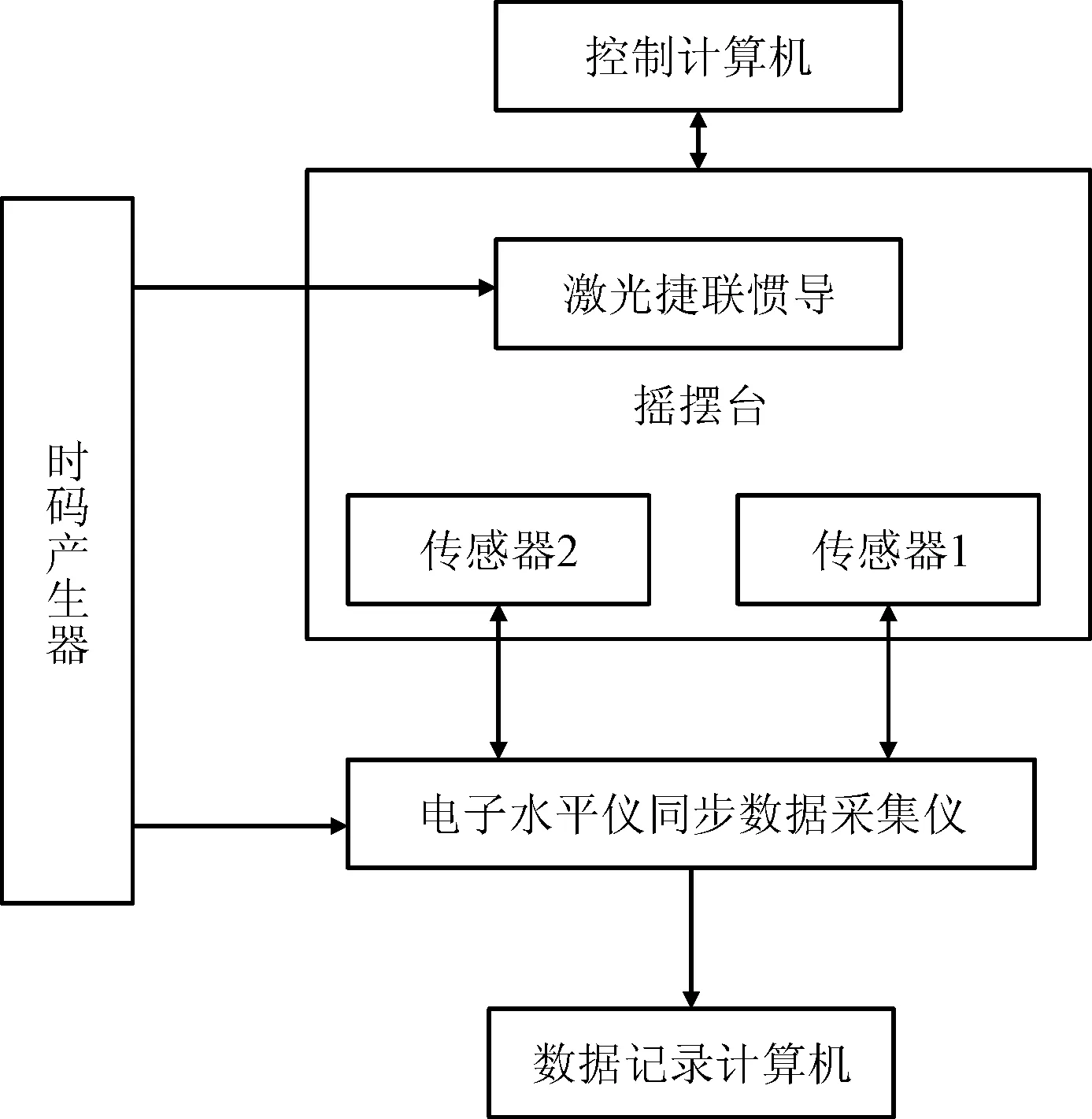
图2 检测系统设备组成图
该系统主要包括1台摇摆台(含控制计算机),1台激光陀螺惯导,2台水平仪传感器,1台电子水平仪同步数据采集仪,1台数据记录计算机(含记录软件与数据处理软件),1台时码产生器(含GPS天线)。其中,摇摆台可三维摇摆,摇摆规律可任意设定,摇摆精度优于2″。激光陀螺惯导校准后,水平测量精度优于1″。
2.2 检测方法设计
由于电子水平仪静态测量精度很高,优于1″,所以采用以电子水平仪静态测量值为真值,检测其动态测量误差的方法。
2.2.1 摇摆台输入数据设计
为充分研究动态测量误差的分布规律,设计了3类振荡环境模拟数据,分别是正弦波振荡数据、系泊条件下振荡模拟数据和海上条件下振荡模拟数据。每组数据分为连续数据和断续数据两部分,其中断续数据是对连续数据的断续化,每10 s设计20个断点,每个断点停留5 s,被断续的数据源时间长度约3 min。
2.2.2 检测步骤
步骤1:将电子水平仪传感器放置于一个高精度三维摇摆台上,并使电子水平仪传感器的敏感轴与捷联惯导的横摇敏感轴尽量平行。
步骤2:在三维摇摆台静止状态下,开启捷联惯导。
步骤3:启动摇摆台,使摇摆台根据设计好的摇摆输入数据进行摇摆,记录电子水平仪同步数据采集仪输出值αi(i=1,2,3,…,n,为数据点数)和捷联惯导的输出值横摇角φj、纵摇角ψj(j=1,2,3,…,n,为数据点数)。
2.2.3 数据处理方法

(1)


步骤3:依据步骤2中捷联惯导输出值φj、ψj,从相对应的连续实验记录的电子水平仪数据中挑选出相同捷联惯导输出值和运动方向的测量数据ak。
(2)
(3)

2.3 检测结果
经过相关实验,检测结果如表1所示。
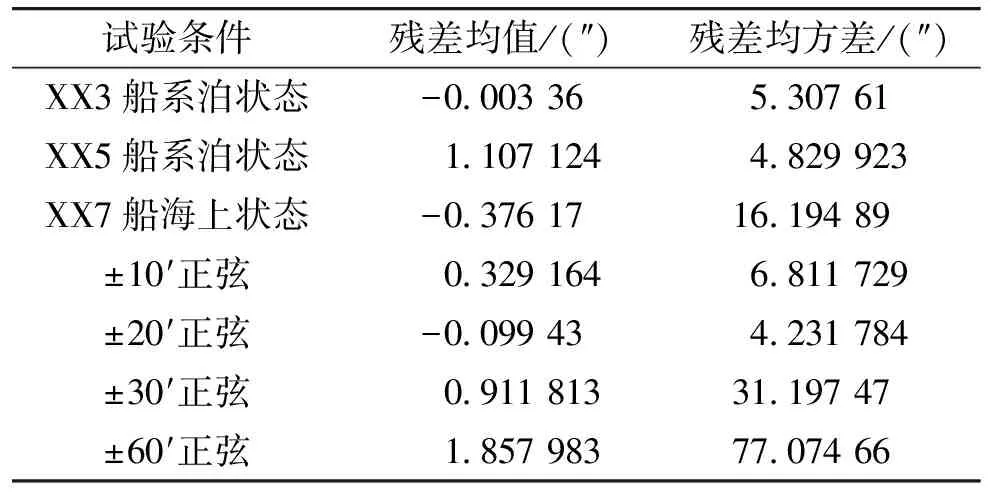
表1 新水平仪动态测量残差统计结果
3 电子水平仪动态测量误差分布规律研究
3.1 正弦波模拟输入条件下误差分布规律研究
理论上,电子水平仪动态测量误差主要受加速度影响,动态测量误差变化规律应和加速度保持一致,加速度变大时,动态测量误差变大,加速度方向取反时,动态测量误差值取反。设加速度影响函数为f(αk),则各点测量值可表示为:
(4)
将式(4)代入到式(2)中,可得新的残差均值公式:
(5)
由于在一个正弦振荡周期内,各采样点的加速度值一般呈正负对称分布,一个周期内f(αk)之和理论上应为0,因此,通过式(5)计算所得的残差均值应为0″。
对4组正弦模拟实验所得的数据进行分析,除超过保精度量程的“±60′正弦”实验外,其它实验所得到的残差均值均优于1″,考虑到其他一些精度影响,实测结果与式(5)计算的理论结果是一致的。此外,四组残差曲线的变化规律均与加速度变化一致,如图3为“±10′正弦”实验的输入波形,图4为“±10′正弦”实验所得的残差曲线,图4中残差曲线变化规律与振荡过程中的加速度的变化是一致的。
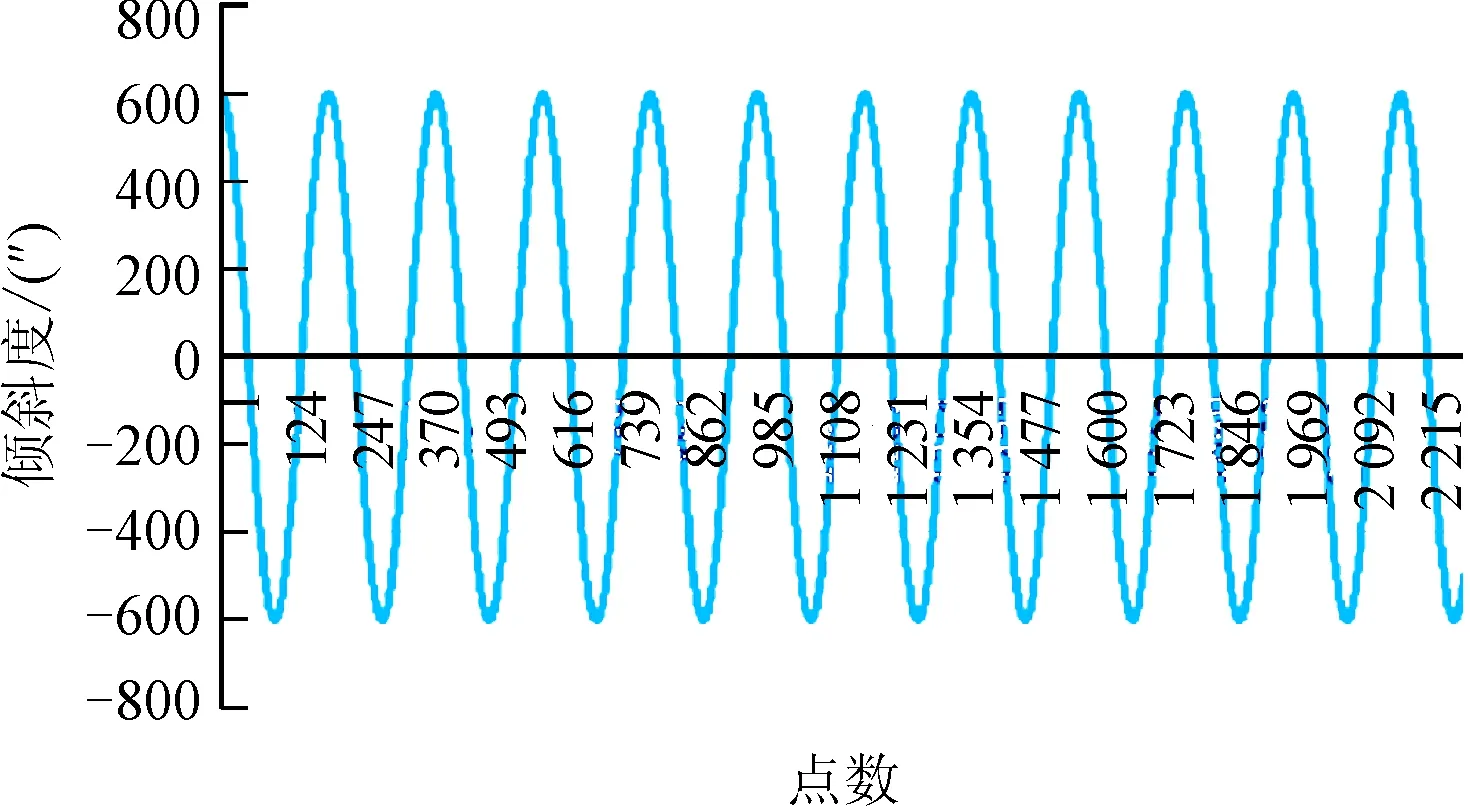
图3 “±10′正弦”实验输入波形
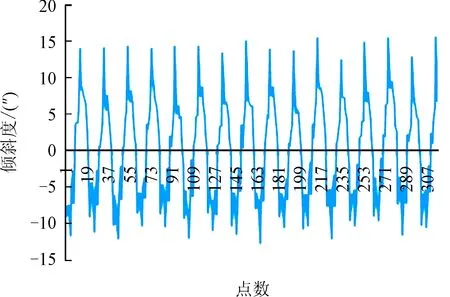
图4 “±10′正弦”实验所得的残差曲线
根据以上实验结果,可以得到以下结论:新电子水平仪动态测量误差动主要受加速度影响,其它误差影响较小。
3.2 系泊状态下误差分布规律研究
系泊条件下的动态测量误差检测共进行了2组实验,实验所得的残差均值分别为-0.003 36″和1.107 124″。如图5为“XX5船系泊状态”实验输入波形,图6为“XX5船系泊状态”所得残差曲线。结合3.1的实验结论,可以推出以下结论:在满足一定数据量的情况下,系泊条件下各采样点的加速度之和存在归零的特性或者说动态误差残差均值存在归零的特性。

图5 “XX5船系泊状态”实验输入波形(横摇)

图6 “XX5船系泊状态”实验所得残差曲线(横摇)
4 系泊状态下惯导水平零值测量方法研究
1)设放置在电子水平仪专用测量平台上的电子水平某方向水平测量值为αi,同时刻惯导同方向水平测量值为φi,惯导平台和电子水平仪专用测量平台在同方向上水平差为ωz,新电子水平仪零值为αz,惯导取齐时该方向上水平零值为φz,惯导动态测量误差di。
2)按照式(6)计算残差均值,i为某时刻采样点编号,αi和φi通过时间标志对齐;
(6)
3)将式(4)和相关零值参数代入式(6),可得:
(7)

4)将差值ωz代入式(7),可得:
(8)
由3.2实验结论可知在系泊低动态条件下满足一定数据量时可认为加速度之和存在归零的特性,因此式(8)可化简为:
(9)
5 结束语
通过前期的相关研究,推导出了新电子水平仪在系泊低动态条件下惯导水平零值计算公式。文中的研究成果主要用于航天测量船在本船码头实施的惯导零值标定工作,由于水纹等条件不同,其它测量环境下,该方法是否适用,还需具体研究。
