曲线型大坝水平位移监测
2018-12-20琚海荣濮久武
琚海荣,濮久武
(浙江华电乌溪江水力发电有限公司,浙江衢州324000)
0 引 言
不同级别不同类型的大坝变形监测,其水平位移都作为必测项目,也是最重要的监测物理量。大坝在水压力及温度应力等作用下会产生平位移,其水平位移方向一般是正应力作用方向。对于曲线型大坝水平位移监测,许多工程得到的是主坝轴线上下游方向和左右岸方向;对于拱坝只求得平行于大坝拱冠上下游和左右岸方向的水平位移。这些方向水平位移不是大坝相应部位正应力方向,难以对建筑物的变形做出合理的工程解释,起不到全面的安全监控作用。
曲线型坝的坝轴线为非直线,各部位位移测点所处的坝轴线方向或所要监测的位移方向不同。拱坝需监测各位移测点的径向(在拱圈曲线上通过该测点的法线方向)及切向(在拱圈曲线上通过该测点切线方向)位移,折线型坝一般需监测各位移测点所处的垂直于和平行于该处坝轴线的方向位移。
1 拱坝水平位移监测
1.1 拱坝监测水平位移方向确定
根据大坝坝顶轴线的形状可分为直线型坝和曲线型坝,曲线型包括折线及弧线等。大部分重力坝及土石坝均为直线型坝,部分为折线型;拱坝的拱圈一般为变曲率的圆弧形或抛物线形。
图1为大地测量法监测拱坝水平位移(见图1),工作基点A、B位于大坝下游两岸,c为已知的基线边长,C1点为待求坐标的位移测点,α、β为角度观测值。
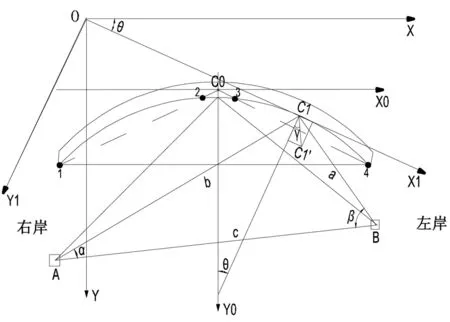
图1拱坝水平位移监测
考虑到拱坝的应力及变形情况,需要求得位移测点C1点之径向、切向水平位移,其径切向坐标系需要在拱坝上下游和左右岸方向构成的大坝坐标系XOY旋转θ角,转换成X1OY1坐标系。故对于曲线型坝可将主坝轴线方向坐标系旋转至各位移测点所要监测位移的方向构成的坐标系,解算其监测方向的水平位移。
1.2 拱坝水平位移监测工程实例
浙江省杭州市华光潭水电站大坝为混凝土双曲拱坝,坝顶拱圈形状为抛物线,最大坝高104 m,坝顶弧长232 m;坝顶共设12个水平位移测点,大坝两岸山体基岩各设置1个水平位移工作基点A、B,采用边角前方交会法监测坝顶各位移测点的水平位移。
根据实际观测的测点所在拱圈二次函数求得各测点相应之θ角(见表1)。
现场观测求解测点所在的抛物线型拱圈方程时,在拱冠中心线上的C0点安置全站仪,观测同一拱圈上左右拱端对称位置的1、4测点及近拱冠2、3测点在平行于大坝坐标系的X0C0Y0坐标系中的坐标,其中1、4测点连线平行于X方向,求得在X0C0Y0坐标系中的拱圈二次函数y=ax2+y0,y0为拱圈上拱冠测点至C0点的距离。
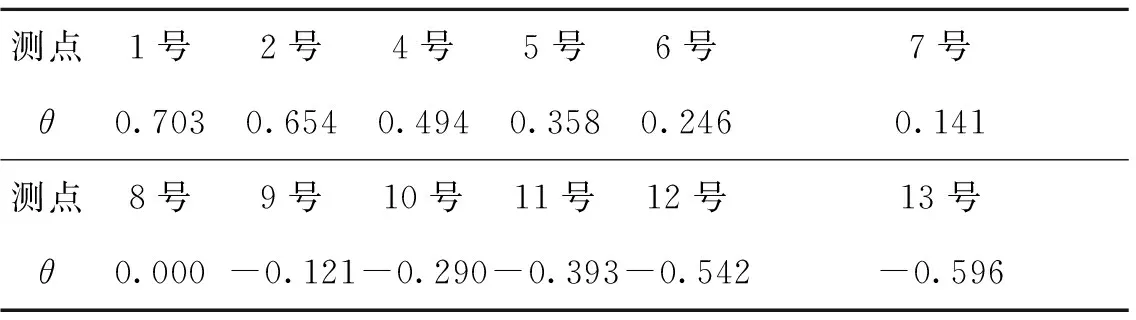
表1 各测点相应之θ角 弧度
由于实际施工放样及观测误差,a左、a右均含有误差。对于左右岸对称的抛物线可取a左、a右的均值作为整个抛物线的值,对于左右岸非对称的抛物线应分别左右岸计算拱圈方程。


对于圆弧型的拱圈上某一点C(x,y)及拱冠O(0,0),其半径R=(x2+y2)/2y。
1.3 坐标旋转角θ推算误差分析
在拱坝上位移测点C1产生位移后为C1′,点位位移量为C1C1′,其径切向位移量分别为:
因坐标旋转角θ推算误差(即γ角误差)导致的径切向位移量中误差为:
上式中,mθ为坐标旋转角θ推算中误差,单位为弧度,主要由a左、a右误差引起。因拱坝径向位移量远大于切向位移量,故上式中γ较小,径向位移量中误差mΔY′远低于切向位移量中误差mΔX′,为保证切向位移量精度,如当点位位移量C1C1′为40 mm时,要求因mθ导致的切向位移量中误差mΔX′基本不影响规范规定的切向位移量中误差(即小于0.4倍规范规定的中误差,约小于0.4 mm);则mθ必须控制在0.01弧度以内,显然这在工程监测中并不困难。
1.4 拱坝水平位移监测误差分析
图1中,拱坝水平位移监测工作基点及各位移测点在相应的旋转后坐标系X1OY1中的坐标按下式计算:

2 折线型大坝水平位移方向确定
对于折线型或曲线型坝,也可按照上述拱坝在不同坐标系中计算径切向位移量的方法,将主坝轴线坐标系旋转至各段不同坝轴线方向的坐标系,再计算在旋转后相应坐标系中的坐标位移量。
2.1 折线型大坝水平位移监测工程实例
图2为浙江龙游社阳水库粘土心墙坝(见图2),坝顶轴线为由三段直线组成的折线,坝顶总长487 m,坝体共设5个横向断面水平垂直位移测点,大坝两岸山体基岩各设置1个水平位移工作基点基左、基右,采用Leica TM50全站仪按四测回边角测量法及极坐标法监测坝体各位移测点水平位移。

图2折线型坝水平位移观测计算
2.2 折线段大坝各测点水平位移观测计算
(1)主坝轴线方向确定的主坝坐标系中水平位移计算
在主坝轴线X方向确定的主坝坐标系中(为使得所有测点X、Y坐标全为正,可将该坐标系适当平移)解算第3、第4横断面位移测点坐标及其位移量,即将工作基点基左、基右及第3、第4横断面中相关的位移测点坐标全部在该坐标系中解算。
在本工程中,在主坝坝顶2-3测点安置全站仪,以基左(740.258 6,245.489 2)、基右(200.000 0,200.000 0)作为已知点进行水平方向、垂直角(观测EDM三角高程用)、平距观测。为得到坝顶其他位移测点的坐标,同时观测其他位移测点的水平方向、垂直角、平距。在平差计算中,以方向中误差、测边固定误差、测边比例误差分别为0.7、0.6、1.0,按先验方差进行平差计算得到2-3测点在主坝坐标系中的坐标及中误差分别为(471.627 1,341.249 7);(mX=±0.37 mm,mY=±0.57 mm)。在主坝坝顶2-3测点安置全站仪同时(极坐标法)观测得到了坝顶2-4测点的坐标及中误差分别为(354.046 7,341.221 7);(mX=±0.61 mm,mY=±0.56 mm)。在主坝坝顶2-4测点安置全站仪以基右(200.000 0,200.000 0)作后视点,按极坐标法观测得到了本测站最弱点4-4测点的坐标及中误差分别为(356.049 5,385.277 7);(mX=±0.21 mm,mY=±0.60 mm)。考虑到工作基点本身的误差传播导致最弱点4-4测点的坐标位移量全中误差为:
均满足规范规定的3.0 mm的精度要求。
(2)X1方向确定的左岸大坝坐标系中水平位移计算
在X1方向确定的左岸大坝坐标系中(将主坝坐标系旋转θ1角,θ1=-15°57′16″或θ1=344°02′44″,并适当平移)解算第1、第2横断面位移测点坐标及其位移量,即将工作基点基左、基右及第1、第2横断面中相关的位移测点坐标全部变换到该坐标系中解算。
在本工程中,在左岸坝顶2-2测点安置全站仪,以旋转后坐标系中的基左(644.265 9,439.510 2)、基右(137.321 5, 247.270 7)作为已知点进行水平方向、垂直角(观测EDM三角高程用)、平距观测。为得到坝顶其他位移测点的坐标,同时观测其他位移测点的水平方向、垂直角、平距。平差计算中以方向中误差、测边固定误差、测边比例误差分别为0.7、0.6、1.0,按先验方差进行平差计算得到2-2测点在左岸大坝坐标系中的坐标及中误差分别为(450.038 7,469.562 6);(mX=±0.52 mm,mY=±0.59 mm)。在左岸坝顶2-2测点安置全站仪以基左(644.265 9,439.510 2)作后视点按极坐标法观测得到了本测站最弱点4-2测点的坐标及中误差分别为(453.589 7,513.568 9);(mX=±0.22 mm,mY=±0.60 mm)。考虑到工作基点本身的误差传播导致最弱点4-2测点的坐标位移量全中误差为:
均满足规范规定的3.0 mm的精度要求。
(3)X2方向确定的右岸大坝坐标系中水平位移计算
在X2方向确定的右岸大坝坐标系中(将主坝坐标系旋转θ2角,θ2=74°00′10″,并适当平移)解算右岸大坝第5横断面位移测点坐标及其位移量,即将工作基点基左、基右及第5横断面中相关的位移测点坐标全部变换到该坐标系中解算。
3 结 论
(1)曲线型大坝水平位移方向主要是正应力的作用方向。拱坝需监测各位移测点径向及切向位移;折线型坝一般需监测各位移测点所处的垂直于和平行于该处坝轴线方向位移。为求得曲线型坝各位移测点的水平位移,可将主坝轴线方向坐标系旋转至各位移测点所要监测位移方向构成的新坐标系,并在新坐标系中解算监测方向的水平位移。
(2)曲线型大坝水平位移监测精度应保证在新坐标系中监测位移方向中误差满足规范要求。
