一种功能分层的无人机测控链路互联互通设计方法
2018-12-19
(中国西南电子技术研究所,成都 610036)
1 引 言
随着无人系统技术的发展及其在战场上的普及应用,各军兵种、功能各异的不同类型的无人机系统协同问题日益突显,美军发布的多版无人系统发展路线图都指出提升无人机系统的互操作性是解决以上问题的关键。美军情报、监视与侦察(Intelligence,Surveillance and Reconnaissance,ISR)宽带数据链[1-3](国内也称为无人机测控与信息传输数据链,简称无人机测控链路)互连互通的能力是实现无人机系统互操作的前提,而测控链路的互联互通内涵为地面终端可接收来自不同厂家机载终端的任务、辅助和链路管理数据,机载终端可接收来自不同厂家地面终端的命令、控制和链路管理数据。
国外无人机领域起步较早,也经历了无人机数据链种类繁多、不能互联互通的过程。随着无人机在各个领域的大量应用,各国都认识到数据链标准化的重要性。为此,美国于2002年11月发布了北约图像系统互操作数据链标准STANAG 7085[4-5]的第一版,2004年发布了第二版。美国和北约国家的新型无人机数据链均向北约STANAG 7085标准统一,用于实现各种无人机系统甚至有人机与无人机之间的互联互通互操作。各厂家都遵循STANAG 7085标准进行设备研制,还可实现不同厂家的设备互联互通,其中美国的TCDL数据链就是符合7085标准的数据链之一,已在美国各型无人机以及与无人机协同的有人机中广泛使用。
国内在无人机领域起步相对较晚,但随着近20年无人机领域的大力发展,也研制出大量适用于不同应用方向的无人机系统,并配套研制了多种无人机测控链路设备,满足了各种无人机系统对控制及ISR信息传输的需求。随着无人机应用范围拓展,伴随而来不同功能的无人机型号的日益繁多,无人机测控链路的互连互通的能力越来越受到重视。虽然国内陆续制定了一系列无人机测控链路相关的标准和规范[6],但主要是一些基本功能、指标的常规性的要求,不足以清晰地描述无人机测控链路为实现互联互通所需的设计指导和约束。因此国内大部分无人机测控链路仍然是与无人机型号匹配的一型一链配置,不具备一链多型无人机或不同厂家链路设备互联互通能力。
本文通过对按功能分层建立的无人机测控链路抽象架构影响链路互联互通的要素分析,结合我国无人机测控链路的实际情况,提出了一种适用于不同型号无人机测控链路的互联互通的设计方法。
2 无人机测控链路分层抽象模型
参考OSI开放式系统互联参考模型,采用功能分层概念建立测控链路的抽象模型[7]如图1所示。测控链路分层模型包含应用层、格式层、链路层、物理层4层,各层都涉及传输特性、管理活动和协议、数据流的组织等功能特性。
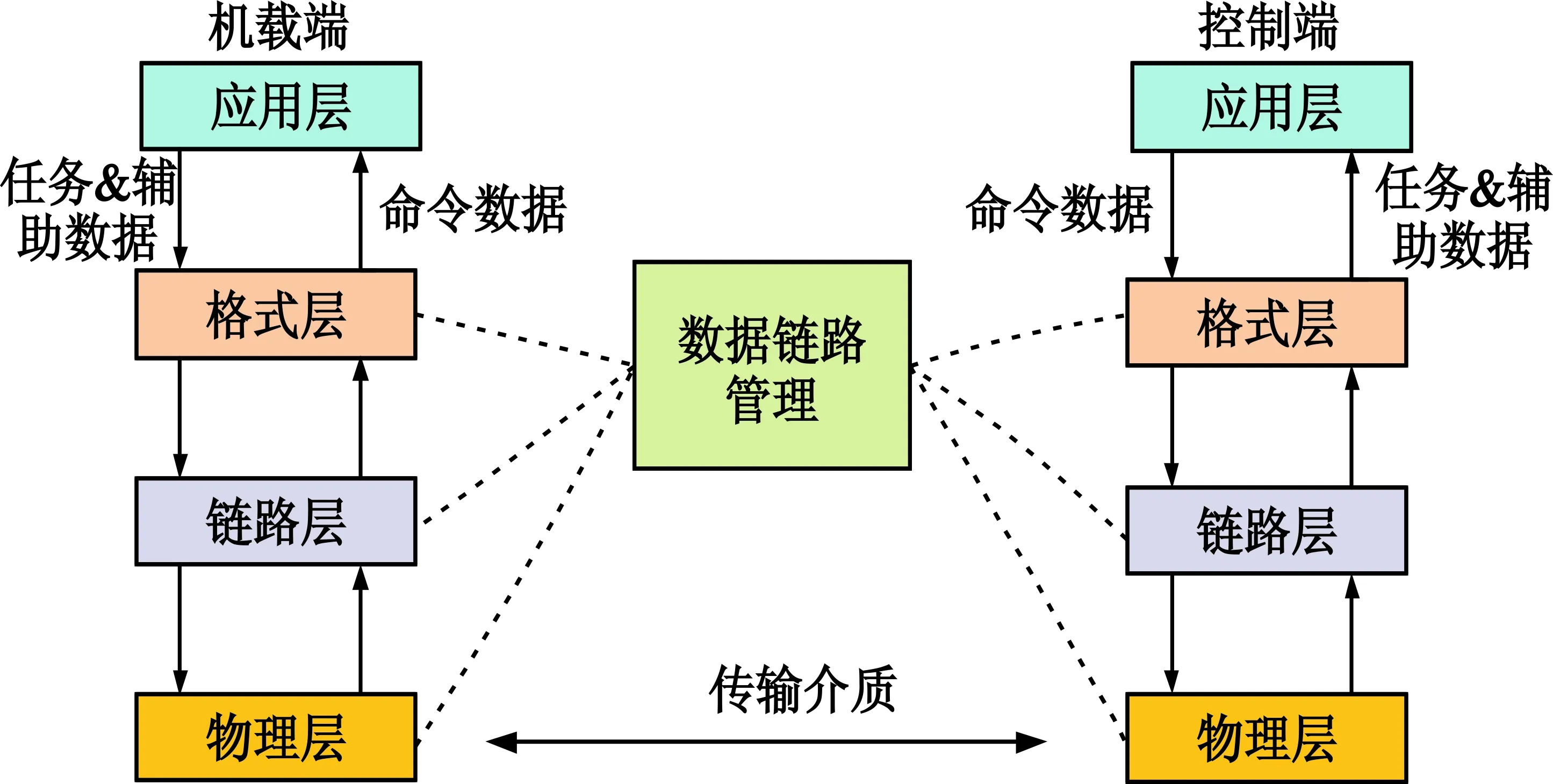
图1 链路4层模型Fig.1 The model of four-layer link
测控链路传输的数据从功能上划分为三大类数据,即传感器数据(含辅助数据,包括实时的传感器数据和保存在记录器的非实时的传感器数据)、管理数据(包括平台、传感器的控制管理类指令消息)和链路控制数据。这3类数据通过抽象分层功能模型与物理模型间有一定的对应关系,图2显示了下行空地链路的分层模型和物理模型之间的对应关系,同样适用于上行地空链路,但数据流方向相反。为实现互联互通,机载终端和地面终端的相应层级需要匹配,如格式层对同种类型数据格式封装匹配,链路层对格式层适配后的数据复接和解复接(组帧和解帧)匹配、链路层的链路管理数据的请求和响应匹配(空地无线链路建立、维持、优化和拆除),物理层波形及传输参数配置匹配等,以确保相互通信。
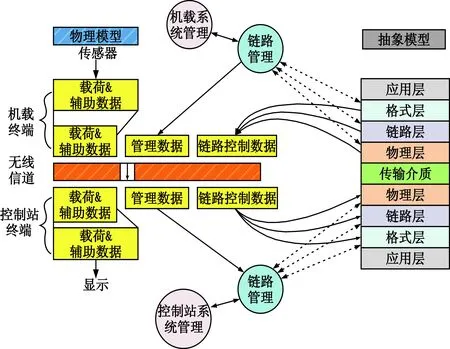
图2 空地链路的数据流和功能模型的对应关系Fig.2 The corresponding relationship between data stream and functional model of air-ground link
功能模型各层级对互联互通影响要素如表1所示。

表1 功能模型中各层级对互联互通影响要素Tab.1 Interconnection influence factors of each layer in functional model
通过表1可知,应用层对外物理电气接口及通信协议与无人机平台直接相关,通常由平台专有接口规范进行规定;格式层中的用户数据格式可采用透明传输,不影响互联互通。但因为不同链路体制其链路管理流程不同,需要对链路管理信息及报文格式中参数的格式及范围进行统一设计:物理层需要约定好空地链路通信波形以及传输参数可实现无线信号调制解调;链路层作为消息处理及链路管理活动的功能实体是影响链路互通互通的关键层级,需要设计格式化的链路管理参数与透明传输的用户数据按需复接为无线传输帧。
根据上述分析,只需将各层级中影响互联互通的因素转化为测控链路端机对外接口、传输波形及通信参数、无线传输帧格式及信息/报文格式、链路管理流程等方面设计约束,即可实现不同型号无人机测控链路的互联互通。
3 无人机测控链路连通性设计
3.1 端机对外接口
端机对外接口与链路外部接入设备有关,包括与传感器、记录设备、平台(地面指控站、机载平台管理设备、任务管理设备等)、链路管理设备等的接口。
由于测控链路端机对外接口中传输的用户数据内容采用透明传输,不影响互联互通;而端机实体的接口形式、协议通常由型号专用接口规范进行规定,不影响作为配套的测控链路端机之间的互联互通。本文仅对端机对外接口中必要的约束要素进行描述,如表 2所示。

表2 端机对外接口要素Tab.2 External interface factors of terminal machines
3.2 传输波形及通信参数
传输波形及通信参数的匹配保证空地通信各方以同一方式了解参数的定义和取值范围,是机载端机和地面端机连通性的基本保证。传输波形是链路连通性主要影响因素;通信参数中除工作频率、频点步进外,其余参数只是反应端机自身性能的优劣,而不会影响空地连通性。而传输波形的连通性设计,必须完整描述发端各波形要素的详细参数。
3.3 无线传输帧格式
无线传输帧是按一定规则约定实现对传感器数据、管理数据和链路控制数据等的封装,主要包括格式层对各类数据的数据分段/重组和适配,并按照数据来源将用户数据封装后进行透明传输,以及链路层将格式层适配后的数据进行复接和解复接操作。无线传输帧组帧流程如图3所示。

图3 无线传输帧复接原理框图Fig.3 The functional block diagram of wireless transmission frame rejoin
无线传输帧的解帧(解复接)即是组帧(复接)逆过程,组帧及解帧操作流程程序不会对互操作性造成影响,但对无线传输帧格式理解不一致将导致链路不能互联互通。
目前,国军标GJB 7102-2010所定义的无线传输帧格式在适应多类型用户数据包和较长的用户数据包方面存在较大的局限性:子帧总长度过短,数据区有效长度受限,三类控制数据往往不能同帧发送;采用多子帧发送时,传输效率低且低优先级数据延时大;往往不能满足不同型号无人机用户数据传输的需求。在单包用户数据大于数据区长度时,除定制重设帧结构,只有将用户数据分包多帧传输,而帧结构中缺乏分包连接标志(或复接表),没有显性分割/重组规则,直接影响链路互操作性。
针对现有国军标对无线传输帧格式定义的局限,笔者通过对功能模型中各层级对互联互通影响要素的分析,设计了一种具有较高通用性的实用无线传输帧格式。该无线传输帧通常可分为报头和有效数据两个字段:报头包括帧头(帧同步字)、帧标识、地址、分包连接标志(复接表)、密管信息、帧计数、帧校验等信息;有效数据可包括多个数据子区,分别封装不同类型的数据(含链路管理数据、用户数据等),分区的类型和长度由报头中分包连接标志进行定义。
采用动态复接帧技术的实用无线传输帧复接时,根据用户数据类型的多少和数据包长度生成对应的数据子区,并将数据子区的类型和数据子区有效数据长度填入复接表,实现多种数据按需传输;接收端根据分包连接标志中的数据类型和长度信息,即可完成对无线传输帧中各类数据的解析、处理和分发。
实用无线传输帧具有的按需传输特性,对不同型号无人机平台差异极大的用户数据包类型和数据包长度需求,具有良好的适应性;无线传输帧中对用户数据包的显性分割/重组规则定义,使遵循该规则的无人机测控链路具有良好的互联互通性能。
实用无线传输帧结构图如图4所示。
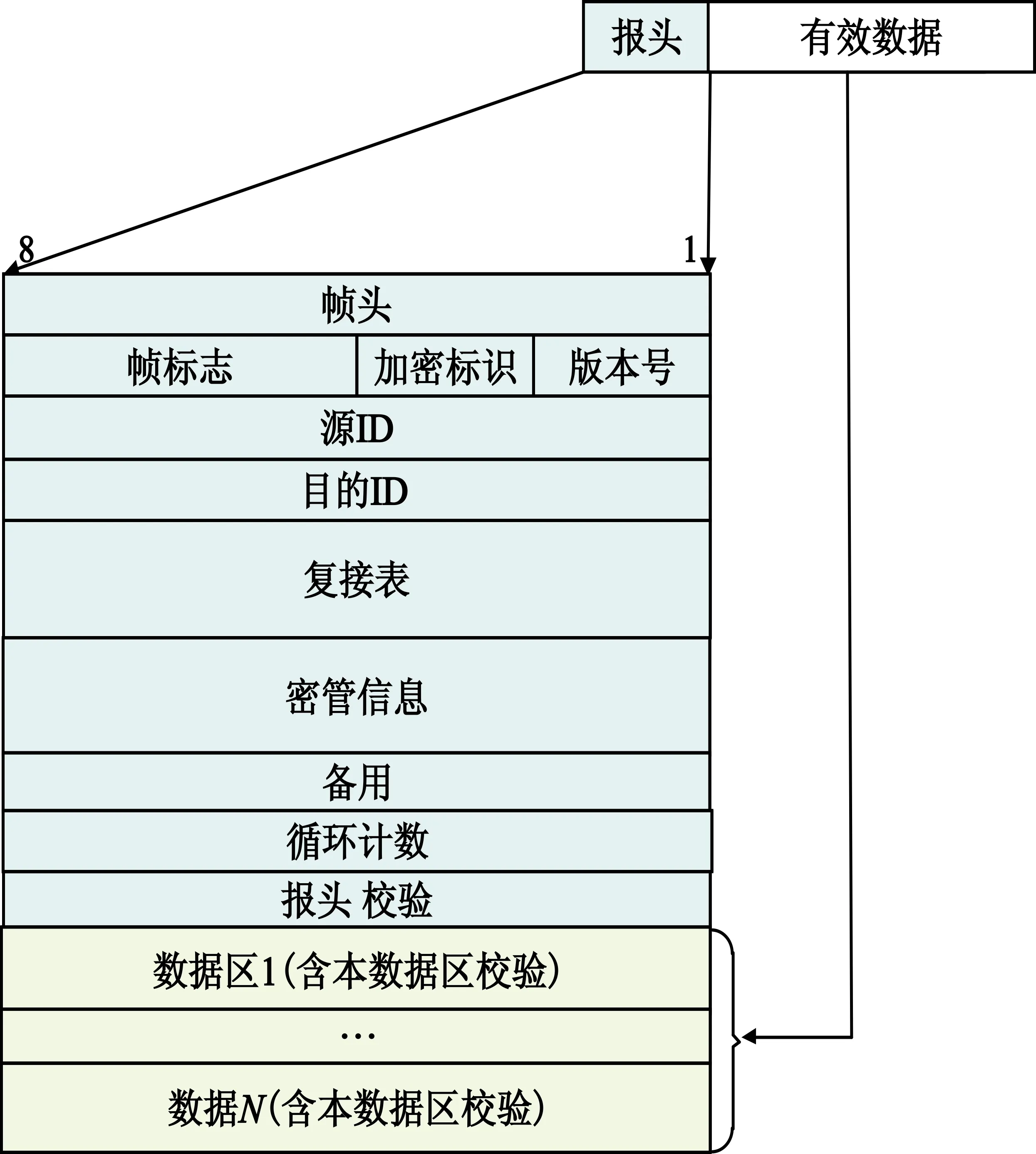
图4 实用无线传输帧结构Fig.4 The structure of practical wireless transmission frame
无线传输帧结构中不同参数对链路的连通性影响程度有所不同,分别就“帧起始信息”字段和“数据区”字段内容进行描述,如表3所述。

表3 实用无线传输帧结构中不同参数对连通性影响Tab.3 Influences of different parameters on connection in practical wireless transmission frames
3.4 链路管理参数格式
在无线传输帧的各种消息/报文中,位于数据子区的链路管理数据最大程度地影响空地端机间互操作性,必须要进行详细进行定义。链路管理数据主要包括波形、频率、带宽和功率等必须的链路操作指令,以及用于链路建立和维护的注入指令(如地面站位置数据等)。各种链路管理数据功能划分以及对链路连通性影响如表4所示。
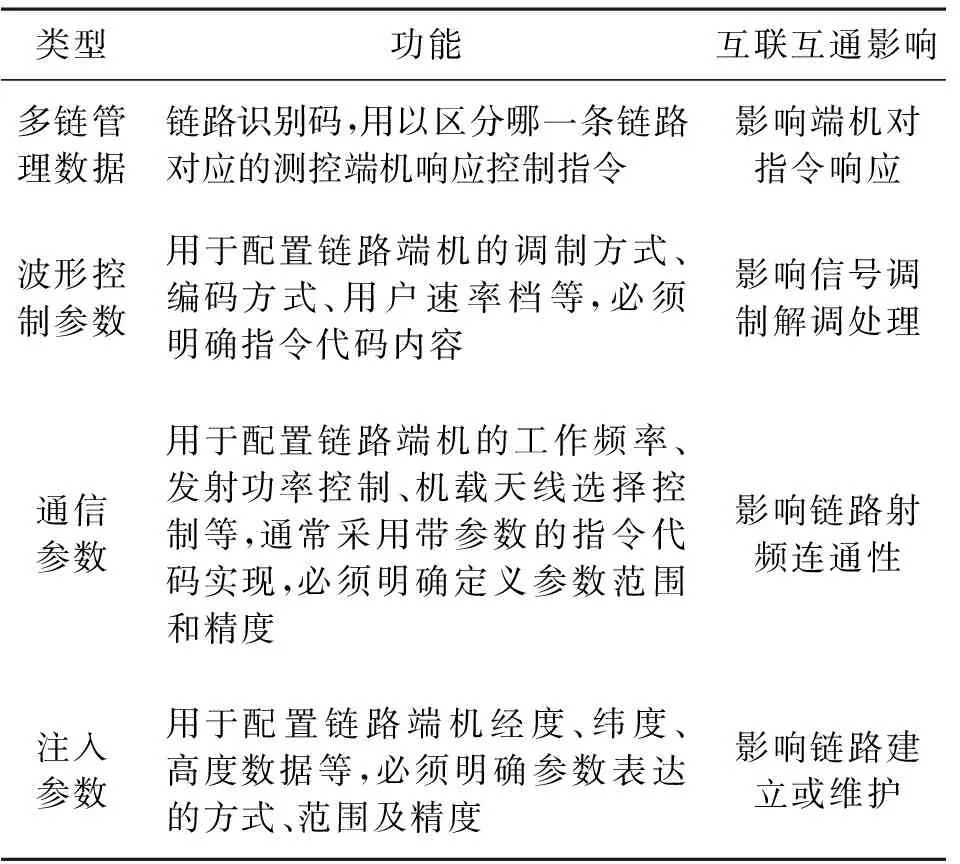
表4 链路管理参数对连通性影响Tab.4 Influences of link manage parameters on connection
链路管理数据参数格式如图5所示。图5中链路管理数据参数中控制指令类型和控制指令子类型复用1个字节表示,图中左上角的“7”代表最高bit位,右上角的“0”代表最低bit位。

图5 链路管理数据参数格式Fig.5 The parameter format of link management data
3.5 链路管理流程
链路管理的目的是在环境限制和作战任务限制条件下使链路运行最优化,其实现途径就是通过各种链路管理活动,包括:评估电磁环境,设置数据传输参数,控制数据流量,根据预先计划或依据动态协商结果向链路终端分配资源,等。
链路管理流程分为机载终端部分和地面终端部分,负责规定必须的链路操作,包括对波形、频率、带宽和功率等的控制。链路管理功能一般由地面终端发起,机载终端可请求改变链路参数,但需地面终端确定是否改变和何时改变。
链路管理的特定活动通常体现为某种在某个终端被调用,用于建立或维持链路的程序。如果该程序对互操作性造成影响,必须对这些特殊程序进行规定;如果该程序不会对互操作性造成影响,就不需要进行约束。影响测控链路连通性的主要链路管理操作因素如表5所示。
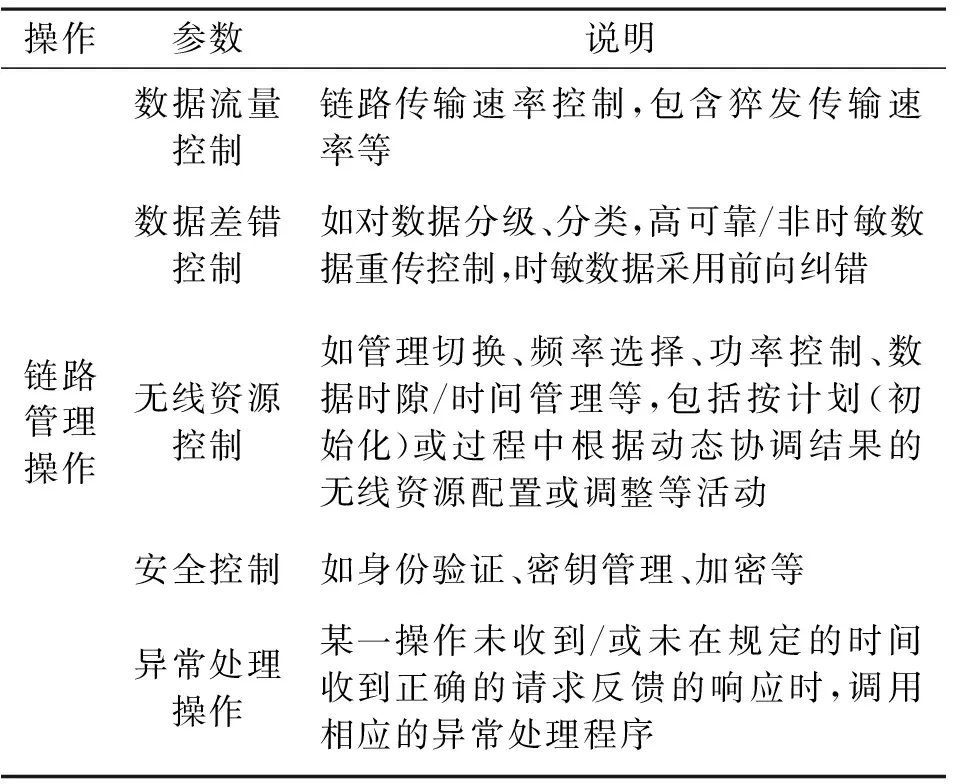
表5 影响测控链路连通性的主要链路管理操作因素Tab.5 Primary factors of link management and operation influencing TT&C link connection
下面以无线资源控制中端机初始化流程和频谱感知及自适应规避流程进行说明。
3.5.1 端机初始化流程约束
初始化上电后,数据链机载终端和地面终端分别调用自己的初始化程序对参数进行配置,初始化程序本身不会影响连通性,但如果配置导致链路机地参数的不匹配,将直接影响到机载、地面端机的不能连通。对此,端机初始化流程活动必须约束的参数包括射频信号的初始传输波形;射频信号的初始工作频率(波道);机载端机、地面端机的ID号;数据加密配置;使用特殊天线方向图,如采用全向天线,用于初始信号的获取和提取机载惯导数据辅助定向天线指向。
3.5.2 频谱感知及自适应规避流程
频谱感知[8-9]及自适应规避流程是机载端机或地面端机根据接收端对电磁环境分析,结合对接收端正常业务接收质量评估,调用的端机内部自适应规避程序进行的无线资源控制操作。该程序分为多个步骤,在端机内部运行的步骤不会影响互操作,但当存在需要与另一方协调的步骤,直接影响连通性。
以地面端机接收频谱感知及自适应规避流程为例进行说明。地面端机该流程由端机内部协议管理设备发起,流程示意图如图6所示,其工作流程如下:
(1)协议管理设备向频谱感知设备发送流程起始信息。
(2)频谱感知设备控制信道设备分段对整个工作频段进行频谱感知,信道设备响应并回报控制到位信息。重复这两步,直至整个工作频段分析完成。
(3)协议管理设备中频谱分析模块接收频谱感知设备输出的分段频谱感知信息,生成工作频带频谱分析结果至自适应规避策略模块。
(4)自适应规避策略模块结合频谱分析结果以及业务数据接收质量评估,制定下行接收工作频率调整参数,生成上行频率控制传输帧,并调整地面端机接收工作频率,同时将控制结果告知操作席位。
(5)通过上行链路通报机载端机,机载端机接收并响应下行工作频率控制,直至下行链路重新锁定,本次流程完成。

图6 频谱感知及自适应规避流程示意图Fig.6 Flow chart of frequency spectrum sensing and automatic adaptation and elusion
图6所示流程中,①~⑤都只是地面端机内部为实现频谱感知及自适应规避功能采用的算法或策略,仅仅反应地面端机自身性能的优劣,不影响机载、地面连通性,不必反映在无线传输帧的链路管控参数中;而⑥和⑦表示链路自适应规避流程中对机载端机和地面端机的工作频率调整操作,就必须以频率控制指令形式反映在无线传输帧的链路管控参数中,且需明确定义参数表达方式、范围和精度,使机、地端机对该指令格式达成一致的理解,才能实现机载端机和地面端机互连。
4 结束语
随着软件无线电技术的发展,当前大部分无人机测控端机设备均具备通过加载相应功能软件模块实现功能变更,而本文提出的基于功能分层的无人机测控链路互联互通设计方法,在不涉及产品具体形态和实现方式前提下,通过约束通信信息帧格式、物理波形和通信参数等即可实现不同厂家测控链路设备互联互通,为我国现役的各型无人机链路改造及后续新型无人机链路通用化设计奠定了基础。
采用该方法研制的通用化无人机测控链路,利用分包连接标志按需复接的无线传输帧,兼容适应用户数据包类型和长度差异很大的不同型号无人机平台对数据传输的需求,具备“一链多型”适应能力,解决了不同厂家、不同型号无人机系统“一型一链”配置的问题,目前已投入实际应用。后续将在本文设计的无线传输帧基础上,进一步细化形成链路协议规范,可支持该型通用化测控链路与遵循该协议规范约束的其他厂家机载或地面端机互联互通,大幅降低用户单位采购、维护和使用成本,减少用户单位对操作使用人员的培训难度和周期,降低整个生命周期内的使用成本,因而具有极其重要的应用价值。