农业机器人移动平台行进方式综述
2018-12-19樊正强杨青丰
樊正强, 张 青, 邱 权, 杨青丰
(1.河北农业大学机电工程学院,河北保定 071001; 2.北京农业智能装备工程技术研究中心/北京市农林科学院,北京 100097)
在农业生产领域,关于移动机器人的研究最早可以追溯到20世纪60年代,但是农业机器人真正得到快速发展却是在最近几十年[1]。随着社会的进步和人们对农产品需求的提高,农业生产已经开始由原来的人力劳动逐渐向自动化和智能化方向转变,农业移动机器人也因此迅速成为研究热点[2]。目前关于农业机器人的研究方向主要集中在4个方面:(1)农业机器人本体的研制和稳定性分析;(2)机器人自动导航技术;(3)农业传感技术与图像处理;(4)机器人硬件、软件开发[3-6]。农业机器人的快速发展,能够在提高农田作业精度和工作效率的同时减少对环境的污染,还能有效避免化肥、农药与人体的直接接触,是一种新的可持续发展模式[7-8]。
农业机器人应用领域非常广泛,按照其功能可分为除草机器人、采摘机器人、搬运机器人、土壤/作物信息采集机器人、收割机器人等[9-10]。与室内或工业机器人相比,农业机器人最大的特点是其主要作业于非结构化环境中并且面对的地形更加复杂[11]。农业机器人在本体研制的过程中须要考虑的问题包括机器人过田垄、行间直线行走、地头转向以及在松软泥泞的田间行进等问题[12],而这些问题与机器人行进方式紧密联系在一起,因此选择适当的行进方式可以有效解决机器人田间作业稳定性问题[13]。常见的移动机器人行进方式包括轮式、履带式、腿式以及复合式等[14]。不同的行进方式对机器人在农田中工作时的稳定性有重要影响[15]。本文对农业机器人的各种行进方式进行了分析。
1 常见的不同行进方式的农业机器人
1.1 轮式农业机器人
轮式农业机器人因其结构简单、行走灵活、转向方式多样化而受到众多机器人研究者的青睐,也是目前研究最多的农业机器人,其优点主要包括自身质量轻、占用空间小、承载能力大、驱动和控制方式简单、行进速度快以及工作效率高等[16];缺点是克服障碍能力有限,例如路面状况会直接影响其运行稳定性,尤其在复杂的农田环境中作业更须要研究如何精确控制其运动轨迹。轮式农业机器人通常根据实际需要确定轮子的数量,最常见的是轮式农业机器人。关于轮式农业机器人的研究主要集中在转向控制问题上[17],通常按照机械结构将其转向方式概括为3种:铰接式转向、差速转向和车轮转向。车轮转向主要包括二轮转向、四轮转向、蟹形转向和原地旋转4种转向控制方式[18]。图1显示了轮式农业机器人常用转向控制方式。一般情况下,二轮转向和四轮转向符合阿克曼转向定理[19],它们在转向时会围绕一个圆心点作纯滚动圆周运动。当二轮转向和四轮转向内外侧车轮转过的角度相等时,四轮转向相对于二轮转向的转弯半径减小了1/2。蟹形转向可以实现机器人的侧向运动,甚至横向运动。原地旋转正好和蟹形转向相反,可以在不改变机器人当前位置的情况下实现零半径转向。关于轮式农业机器人的例子比较多,如美国华盛顿州立大学张勤团队的bin-dog果园搬运机器人[20]、巴西圣保罗大学研发的Agribot农业机器人平台[21]以及国内由中国农业大学研发的作业目标信息获取农业机器人[22]、华南农业大学研发的电动轮式机器人[23]、中国农业机械化科学研究院和中国农业大学研发的农用轮式机器人平台等[24]。一些典型的轮式农业机器人如图2所示。


1.2 履带式农业机器人
履带式农业机器人结构种类较多,常见的可分为带履带臂和不带履带臂2种,带履带臂的又被称为履腿复合式机器人[25-26]。通常履带式机器人可以根据其自身结构分为单节双履式、双节四履式以及多节多履式[27]。图3显示了履带式农业机器人的常见结构,其中,图3-b和图3-c带有履带臂,相比图3-a有更好的越野性能,在农田中工作时,可以根据地形的需要决定履带臂的高度,从而顺利通过障碍物。履带式农业机器人的优点包括:结构紧凑,负重能力强;与地面的接触面积大,下陷深度低,适合在松软或者泥泞的农田作业;由于履带式机器人通常采用差速方式转向,因此可以实现零半径转弯,降低了对空间的要求[28];履带式机器人越野性能强,可以有效解决过田垄和跨越障碍物的问题[29]。履带式农业机器人也有一些缺点,主要包括:移动速度慢;消耗能量大;行驶机构容易磨损,对履带的材质和构型要求高;其本身的质量大,导致与地面摩擦阻力过大,因此在松软土地上转向时,容易对平整的农田造成不必要的损坏,甚至会对农作物造成伤害。一些关于履带式农业机器人的研究在文献[30-34]中给出,其中分别介绍了采用履带式结构的自动可视除草机器人、农用仿形履带机器人、开放式农业机器人移动平台、集田间除草与信息采集为一体的多功能履带式农业机器人Armadillo以及履带式油菜移栽栽植孔成型机。一些典型的履带式农业机器人如图4所示。
1.3 腿式农业机器人
与轮式或者履带式农业机器人相比,腿式农业机器人最大的特点是其运动轨迹由一系列离散的点组成[35],这也造就了其能够适应更复杂的地形环境,不用太多考虑地面的平整度,因此跨沟壑、过田垄和梯田作业成为其强项。又因为腿式农业机器人与地面形成点与点的接触,因此不会对农田造成较大的破坏。腿式农业机器人的自身缺点也非常明显,首先腿式机器人能量消耗高,工作效率低;其次由于其本体腿关节处的自由度过高,导致其腿部的协调性难以控制,因此控制算法对其工作时的稳定性有重要影响[36];另外腿式农业机器人有相对较小的负重能力,不宜搭载过重的传感器或操作装置[37]。正是由于腿式农业机器人的这些缺点,因此研究者对纯腿式的农业机器人研究比较少,而更倾向于研究轮腿、履腿等复合式机器人,这样既能发挥腿式农业机器人的优点,又可以避免纯腿式农业机器人在控制方面的难度,增强了其运行稳定性,同时也可以适应更多的地形。从现有文献看,目前对于腿式机器人的研究主要集中在双腿、四腿、六腿结构上[38]。文献[39-40]中介绍了四腿式和六腿式农业机器人,其中分别介绍了四足锄草机器人和多机器人协调合作的六足种植机器人(http://dorhoutrd.com),这2种机器人如图5所示。



1.4 复合式农业机器人
复合式机器人包括轮履复合式、轮腿复合式、履腿复合式以及轮履腿复合式等[41]。用于农业方面的复合式机器人通常由能够适应非结构化环境的多用途机器人改装而成,相关研究在文献[42-44]中给出,其中分别介绍了轮履式农业机器人越障控制方法、适应于非结构环境的多功能轮腿复合式机器人和由中国科学技术大学研发的新型六轮腿机器人。图6是多功能轮腿复合式机器人和新型六轮腿机器人。复合式农业机器人可以避免单一行走结构机器人的一些弊端,人们可以根据农田环境的要求选择适合地形的复合式结构[45]。当在复杂农田环境中行走同时又对速度和效率要求不高的情况下可以选择履腿复合式结构; 当农田土地比较松软又对速度和效率要求比较高时,可以采用轮履复合式结构;当地面沟壑、田垄过多或者在梯田作业同时又对效率要求高时,可以考虑轮腿复合式结构;当地面非常特殊,要求机器人可以适应各种复杂环境时,可以考虑轮履腿复合式结构,但是这种结构过于复杂,目前对这方面研究较少。复合式农业机器人的优点是对各种地形都做了充分的考虑,可以满足较大难度的作业需求,但其缺点也很明显,其机械结构过于复杂,控制机器人行走时考虑的因素较多,面对复杂地形选择适当行进方式的控制算法较复杂。混合式农业机器人并非可以继承各类单一行进方式机器人的全部优点,正如文献[15]中提到的,由于混合式行进方式相比其他行进方式的机器人机械结构更加复杂,往往导致混合式结构在行走时会削弱单一行进方式的一些优点,但同时又会综合各行进方式的部分优点。因此,复合式机器人一般用于特定场合的农田环境中作业。

1.5 农业机器人各种行进方式比较
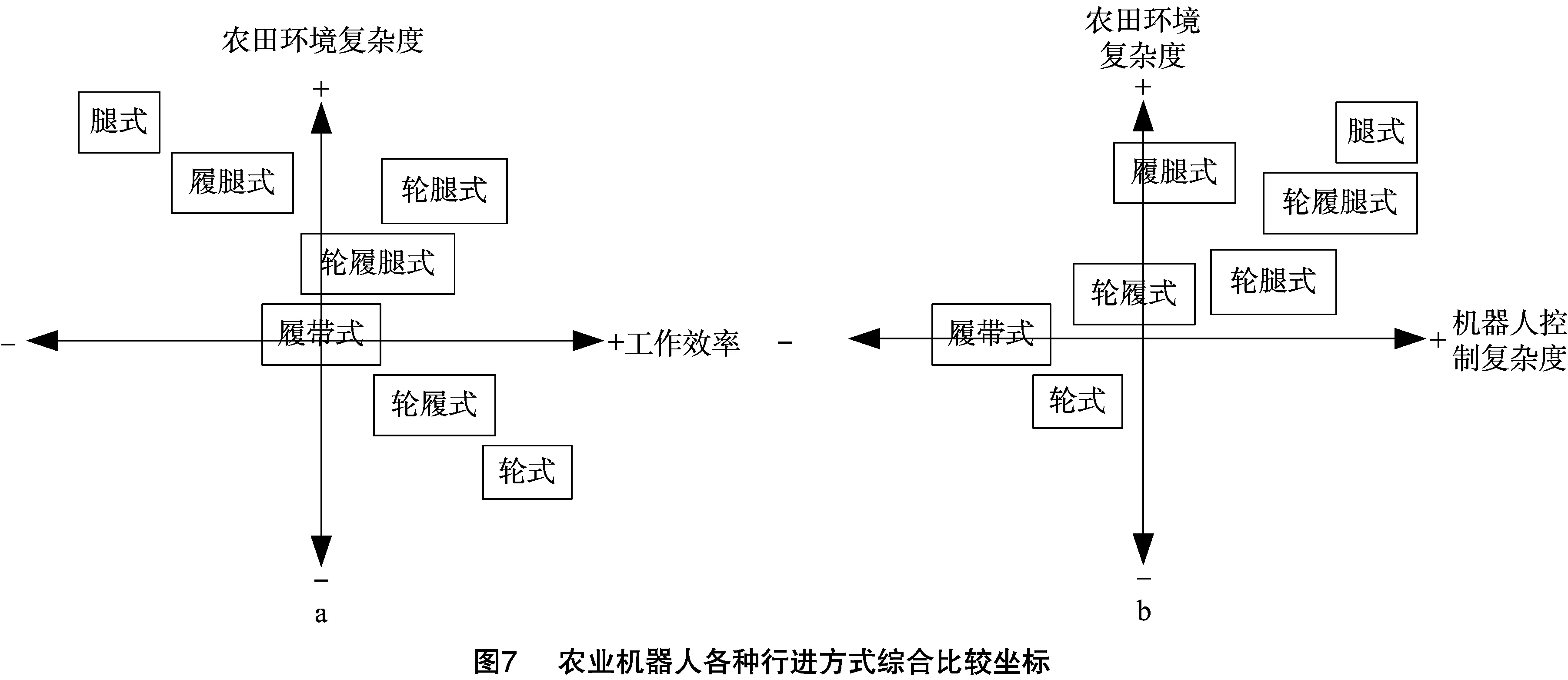
根据前述内容将农业机器人各种行进方式的一些主要特性做成表格进行比较,如表1所示。从表1中可以看出,在能源利用率方面,轮式消耗能源最少,腿式最多,履带式居中;作业效率方面,轮式作业效率最高,腿式最低,履带式居中;跨越障碍方面,轮式越障能力最弱,腿式最强,履带式居中;控制复杂度方面,履带式最容易,腿式最难,轮式居中[46]。而复合式结构的机器人结合了各种行进方式的优缺点。图7是根据表1作出的农业机器人各种行进方式综合比较坐标图,图7-a、图7-b分别以农田环境复杂度和工作效率以及农田环境复杂度和机器人控制复杂度为坐标轴对各种行进方式进行了对比。综合各方面因素可知,无论在能源利用率、作业效率还是控制方面,轮式和履带式技术都比较成熟,实用能力更强;而腿式和复合式结构虽然越障能力极强,但是在技术方面远低于轮式和履带式行进方式,同时由于它们工作效率较低,因此更适合通过多机器人协调控制来完成作业任务。

表1 农业机器人各种行进方式综合比较
注:L(low)表示低,M(medium)表示中,H(high)表示高。
2 存在的问题
就目前来看,农业机器人移动平台研究虽然已经取得了很大进展,但是根据研究现状可以发现,目前对农业机器人的研究主要集中在轮式和履带式相关结构上,而对腿式和复合式结构研究较少[47],其主要包括两方面原因:首先从硬件角度看,虽然很多高精度传感器技术已经成熟,但是这些传感器大部分都是通用型的,对于应用在农业机器人领域的专用传感器研究较少;其次是算法方面,在腿式结构机器人研究中涉及自由度过高、控制复杂等问题,如何找到一种合适的算法实现对腿式或者混合式机器人的精确控制仍然有待研究[48]。即使较简单的轮式或履带式机器人目前也没有大面积用于农业生产,还主要集中在研发和试验阶段。关于农业机器人的推广要解决3个问题:(1)电池的续航问题,保证机器人持续作业;(2)成本问题,只有控制好成本才有市场可言;(3)智能问题,面对普通农民必须开发出操作简单、工作稳定的农业机器人[49]。
3 结论与展望
本文综述了农业机器人移动平台常见的行进方式。农业机器人常见行进方式包括轮式、腿式、履带式和复合式,复合式机器人又包含了轮腿、履腿、轮履和轮履腿4种结构,总共3种单一行进方式、4种复合式行进方式。根据各种行进方式的特点,对它们所能适应的农田环境进行了分析:轮式和履带式虽然相对于带腿式结构的机器人对复杂环境的适应能力较弱,但是由于它们工作效率相对较高、控制简单,可以完成大部分农田环境作业,是目前研究最多的农业机器人;腿式和混合式结构机器人,尽管可以适应更复杂的环境,但是它们工作效率比较低并且控制复杂,因此研究相对较少,目前它们主要用于特定场合的农田环境。
农业机器人在社会上发挥越来越重要的作用,并逐渐成为现代农业智能化水平的标志之一[50]。为了更好地适应农田环境作业,未来应该更加关注腿式和混合式农业机器人的发展,尤其是腿式机器人作为仿生机器人的一种,始终是一道难题,在农业方面的应用更是少之又少,须要加大对其研究力度促进农业机器人行业的迅速发展;同时也要推广轮式和履带式农业机器人的实际应用能力,早日实现农业机器人的规模化和市场化,为我国智慧农业的发展开辟新的道路。