基于多智能体一致的分布式网络化防空火控系统*
2018-12-19王一帆盛安冬李银伢戚国庆
王一帆,盛安冬,李银伢,戚国庆
(南京理工大学自动化学院,南京 210094)
0 引言
为了精确掌握空情信息以及缩短对空火控系统的反应时间,网络化防空火控系统是信息化作战条件下火控系统发展的必然趋势。不同于传统的火控系统,网络化火控系统具有反应速度快,战场适应性强和组网灵活等优点。
在早期的防空火控系统中,利用火控网中心对各作战单元(包括跟踪系统和火力系统)上报的信息进行集中式处理。这种集中式的信息处理方式具有中心节点信息处理任务繁重、扩展性差以及抗毁性差等缺点[1]。鉴于传统集中式信息处理方式的不足,许多学者致力于网络化火控系统结构的研究。文献[2]提出一种基于分布式节点的防空火控系统,研究了该系统的同步技术、基线转换以及数据融合问题。文献[3]基于网络化控制系统理论设计了网络化防空火控系统的体系结构和工作流程。同年,文献[4]针对网络化防空火控系统的航迹融合问题进行了研究,提出了基于联邦Kalman滤波技术的航迹融合方法。文献[5]分析了防空火力系统的发展现状,提出了弹炮结合武器系统的发展趋势。2017年,文献[6]研究了陆战武器网络化火控系统的架构、作战模式以及系统信息流程,总结了网络化火控系统的发展应用前景。上述文献的研究成果为网络化防空火控系统的设计与实现奠定了良好的基础。
近年来,多智能体系统以其可靠、高效以及分布式一致等优势,在机器人、电力系统以及卫星集群控制等领域日益受到关注[7-9]。本文将多智能体一致性思想引入网络化防空火控系统,将网络化火控系统中的作战单元视为智能体,利用拓扑图描述多智能体的通信结构;基于此,文中提出了基于无偏测量转换Kalman一致性滤波(UCMKCF)的数据融合算法。在通信拓扑图联通时,所提基于多智能体一致的分布式网络化防空火控系统无需中心节点融合即可获得一致精确的目标运动状态估计,提高了网络化防空火控系统的协同作战能力。
1 防空火控系统目标跟踪模型
网络化防空火控系统中,典型空中飞行目标在笛卡尔坐标系下的状态方程可描述为


图1 火控跟踪系统测量模型

探测器Ci对应的量测方程(2)为非线性方程,可将极坐标系下测量值无偏测量转换为伪线性测量[10]。式(2)可转换为

其中


其中

2 基于多智能体一致的分布式网络化防空火控系统
2.1 传统网络化防空火控系统
传统网络化防空火控系统的火控网中心通过网络收集与之相连接的探测器的观测数据,并对其进行有效的处理,形成统一的目标状态信息。数据处理主要由数据预处理和数据融合两个部分组成。
数据预处理包括时空误差配准和航迹关联。首先,火控网中心收集到的目标测量数据存在时间差。因此,火控网中心需要对带有时标的测量数据进行时间配准[11]。此外,考虑到探测器布站,需通过基线测量将目标测量信息转换为公共坐标系下的数据[12]。
在传统网络化防空火控系统中,火控网中心不仅需要处理各探测器的情报信息,而且还要执行指挥功能(火力分配、引导跟踪等)。因此,传统防空火控系统通信组网复杂,计算量和通信量很大。在实际应用时,网络化火控系统所面临的都是复杂、困难以及激烈对抗下的战争环境。一旦火控网中心通信中断或遭受攻击,整个火控系统将无法运作,故传统网络化防空火控系统的抗毁性差。
2.2 基于多智能体一致的网络化防空火控系统体系结构设计

图2 基于多智能体的分布式网络化防空火控系统体系结构
针对传统网络化防空火控系统的不足,文中提出一种基于多智能体的分布式网络化防空火控系统,并探索一致性滤波(Consensus filtering,CF)在分布式防空火控系统中的应用。
图2给出了该分布式网络化防空火控系统的体系结构。将火控子网中的各火控单元描述为网络中的单个智能体,用无向图表示多智能体(火控单元)的通信结构。为节点集为边集,表示图的边。i节点的邻居节点用集合表示。利用表示图的邻接矩阵,若。若,元素aij满足,节点的度为与该节点相连的邻居节点个数,度矩阵中的元素Δij满足。图的Laplacian矩阵定义为。
图2中,在系统指挥层,火控网信息协调中心是网络中的中枢单元,可与各火控单元进行通信,负责指挥控制和火力分配。在系统执行层,通过网络接口设备,各火控单元根据自身的带宽与一个或多个邻居节点建立通信链路生成信息传递网络。同时,通过与邻居节点的信息交互,进行分布式航迹融合,使得网络中各火控单元获得一致精确的目标信息。
与传统的网络化防空火控系统相比,所提网络化防空火控系统的体系结构具有下述特点:
1)网络中的火控单元(智能体)仅通过与邻接智能体进行信息交互并进行数据处理,将火控网中心的数据处理任务分散到各个智能体,从而降低火控网中心的计算负担和通信量。
2)便于火控系统的扩展,所提网络化火控系统中的智能体可根据实际战场环境需求进行通信拓扑重组,新加入组网的智能体仅需要和原网络中的任意一个或多个智能体建立通信链路,在一定条件下可实现与其他智能体协同作战。
3)所提网络化火控系统按照网络中节点的不同功能将系统划分为执行层和指挥层,即将信息融合与指挥决策分离,具有较强的抗毁性。
本节主要给出了基于多智能体一致的分布式网络化防空火控系统的体系结构,下一节将给出这种新型防空火控系统对应的航迹融合算法。
3 基于一致性滤波的分布式航迹融合

图3 分布式网络化防空火控系统数据处理流程
图3给出了分布式网络化防空火控系统数据处理流程。目标航迹融合在火控单元(智能体)完成,不再依赖于火控网中心的集中式处理。各火控单元仅需与邻接火控单元交换带时标的目标信息,利用交互所得目标信息的时标进行时间配准,并将目标信息转换到公共坐标系完成数据的空间配准,最后通过航迹融合得到目标运动参数估计。
在实际工程应用中,由于可能存在障碍物遮挡、探测能力受限、测量丢包以及高噪声工作环境等因素,使得火控跟踪系统的探测概率小于1,即存在不完全量测现象[13]。利用服从Bernoulli分布的二元变量表示k采样时刻火控探测器i的测量情况。当时,火控探测器i获得测量;反之,表示测量丢失。火控探测器i的探测概率为。
针对基于多智能体一致的分布式网络化防空火控系统的航迹融合问题,文中提出一种无偏测量转换Kalman一致性滤波(UCMKCF)算法。下面给出k采样时刻火控单元(智能体)i的目标状态估计算法:
步骤3:根据式(5)~式(6)分别计算智能体 i的转换测量误差均值和方差。
步骤4:智能体i进行一步预测

步骤5:智能体i进行量测更新

步骤7:获得智能体i的Kalman一致性状态估计

式中,ε为取值较小的一致性系数。
下面给出所提UCMKCF算法稳定的条件:


引理2:考虑具有固定通信拓扑的网络化防空火控系统,目标状态方程和测量方程如式(1)、式(3)所示。当系统参数矩阵满足假设1,2,则所提算法估计误差均方意义下指数收敛[15]。
4 试验与分析
利用文中所提基于多智能体一致的分布式网络化防空火控系统的体系结构,构建具有1个火控网信息协调中心和6个火控单元(智能体)组成的分布式网络化防空火控系统,并给出了所提航迹融合算法(UCMKCF)的估计性能。
表1给出了各火控单元的布站,图4给出了由6个火控单元(智能体)组成的分布式网络化防空火控系统的通信拓扑。

表1 火控单元布站

图4 分布式网络化防空火控系统通信拓扑
目标状态转移矩阵Fk和过程噪声方差Qk为

其中,采样周期T=0.32 s,目标过程噪声q=1 m/s2。
为了简化分析,考虑各火控探测器的采样周期及测量精度相同。探测器测距精度,方位角测量精度,高低角测量精度。探测器探测概率。目标在笛卡尔坐标系下匀速飞行,目标初始状态为

对于式(1)、式(3)所示的网络化防空火控系统跟踪方程,给出满足假设1、2的系统参数为:

图5分别给出了分布式网络中各火控单元的位置均方根误差(RMSE)和速度 RMSE[13]。位置RMSE和速度RMSE可表示为

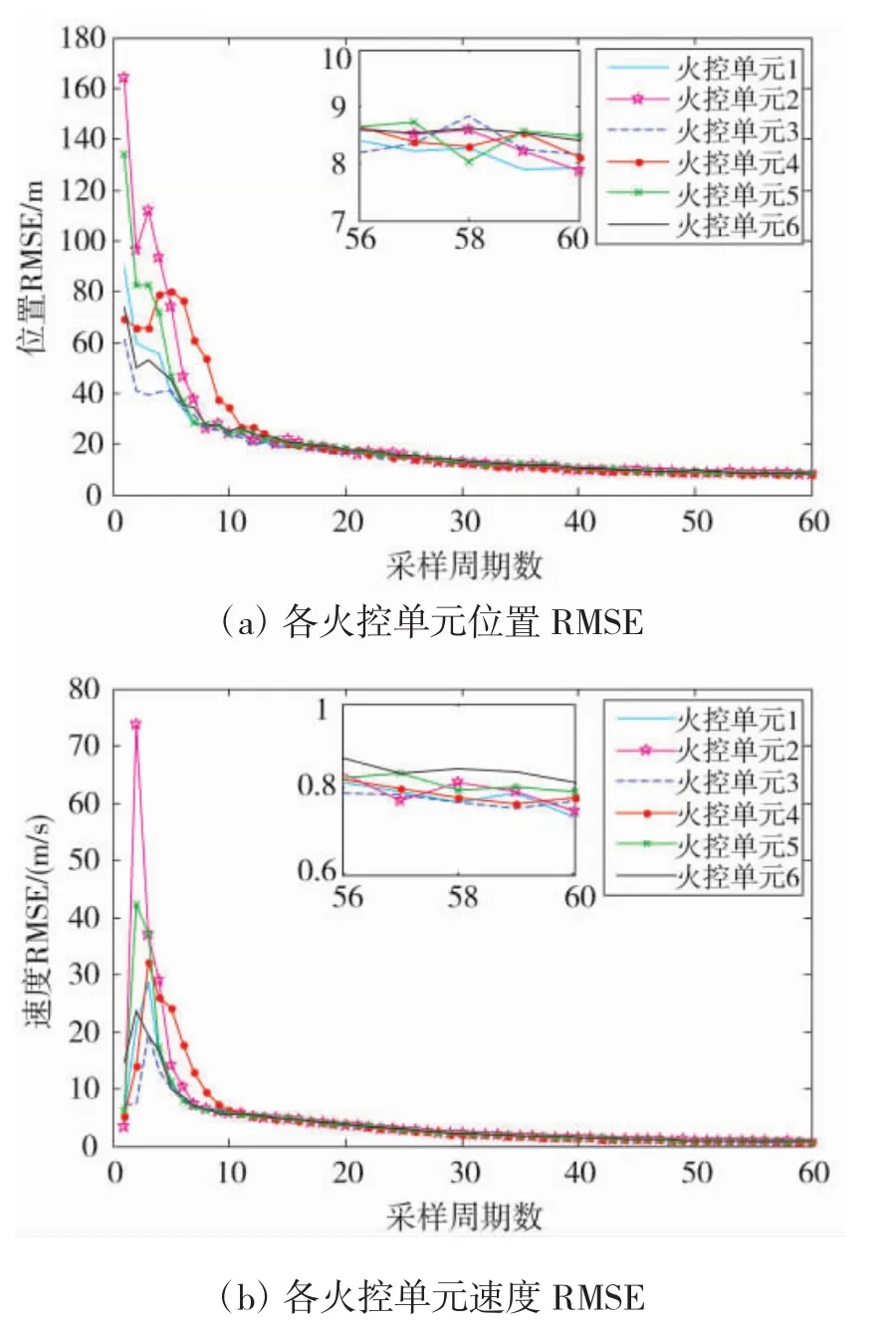
图5 分布式网络化防空火控系统各火控单元估计精度
由图5可知,利用本文所提UCMKCF可精确地估计运动目标状态。同时,各个节点的估计误差在滤波算法收敛前即可达到一致。
进一步考虑不完全量测现象对火控跟踪系统的影响,以节点3为例,表2给出了不同探测概率3下稳态RMSE。从表中易知,火控单元的估计精度随着探测概率的增大而提高。

表2 不同探测概率下火控单元3的稳态RMSE
文中所提分布式UCMKCF算法仅通过网络内各火控单元之间通信,即可实现对目标状态估计的一致。与传统火控系统相比,所提火控系统将火控网中心的信息融合功能分散到各节点,火控网中心仅需完成指挥决策功能。同时,所提防空火控系统体系结构大幅降低了火控网中心的通信量和计算量,也增强了火控系统的稳定性和抗毁性。
5 结论
本文针对基于多智能体一致的分布式网络化防空火控系统的体系结构和信息融合技术进行了深入的研究。借鉴多智能体思想构建了不依赖于火控网中心信息融合的分布式火控系统体系结构,并提出了一种无偏测量转换Kalman一致性融合(UCMKCF)算法。试验结果说明:通过网络内节点之间的信息交互,所提算法可使各火控单元获得精确并一致的目标状态,为后续的协同作战提供了必要条件。文中所提防空火控系统的体系结构和融合技术可为工程实际中的火控系统设计奠定良好的基础。
