节能型太阳追踪功能光纤导入式照明设备研制
2018-12-18张建超德雪红郁志宏
张建超,德雪红,葛 延,郁志宏
(内蒙古农业大学 机电工程学院,内蒙古 呼和浩特 010018)
1 引言
多年以来建筑的日间采光完全依赖开窗,而无法开窗或开窗面积和位置受限的空间,却只能依靠电力照明来补充照度不足的要求。从上世纪末开始,世界各国一直都在对阳光导入照明的技术原理和装置进行研究[1-5],但成果均不明显。当前,光纤导入式的照明技术在日本已经有了成熟的商业应用方案,国内也逐渐出现了一些可实际应用装置的案例[6-11],但目前还没有更高效的、节能的阳光导入照明设备问世。
提出太阳能光纤导入式照明设备可改变此现状,此种设备利用光学、机械原理和自动控制原理等理论设计而成,该设备将光采集装置放置于室外光照充足处,通过阳光在柔软光纤中进行传输,实现室内照明,照明点可布置在室内任意位置,从而彻底将照明点和开窗位置分离开来,让建筑物日间照明方式产生划时代意义改变[12]。且该技术应用有诸多优点,如光电分离,节能效果好,效率高成本低廉,操作方便,能大幅拦截紫外线,有利于人类身体健康等[13]。
2 设计原理
2.1 太阳能光纤照明原理
利用光纤导入方式为不便于采光照明的房间实现较低成本的日光照明。这里的太阳能光纤导入式照明设备涉及到光传输、折射、全反射等原理[6-9],如图1所示。该系统是由三部分—聚光、传导和放射—组成。
平行的太阳光透过聚光装置进入到照明系统中,汇聚到光纤内,经传输后由系统尾端的放射装置射出,实现自然光照明。
2.1.1聚光装置
为实现阳光的采集和传输,设计的光路,如图1所示。先通过透镜折射聚焦,把平行光线聚集于近焦点处实现光与接收器之间的耦合,再通过接收器与光纤之间的界面进入光纤,设备需要太阳方位追踪结构,以实现光路传输的精确度。
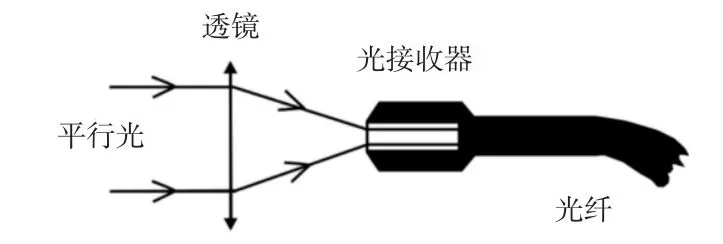
图1 由菲涅尔透镜、光接收端和光纤组成的光路径图Fig.1 The Optical Path Consists of a Fresnel Lens,a Light Receiving End,and an Optical Fiber
由于太阳光经过汇聚作用后光能和热能高度集中,光接收器经过散热设计,经实验验证,其热量可及时散失,温升在光纤承受正常值内。
根据需要可以在整个光采集器外面安装带有紫外线隔离功能的透明外罩,进一步减少紫外线并加强装置的防尘保护。
2.1.2 传导装置
根据全反射原理,光纤照明系统可实现将光传输到室内指定位置,且光纤传输产生的电磁影响几乎可以忽略,对电磁敏感以及防火安全要求高的场合有较强适用性。同时因为线径细,易于布线。光纤相比金属导线重量较轻,且具有较强的抗腐蚀性。目前市面上的塑芯光纤性能优良,成本较低,具有较强利用价值。本设备采用单芯塑芯光纤,直径为Ф5mm。
2.1.3 放射装置
放射装置原理及作用,如图2所示。放射装置是配置在光纤末端的各类反射式或折射式的发光附件,其终端可配置筒灯结构、透镜结构(发散或汇聚型光)、水下结构及地面专用结构等形式。
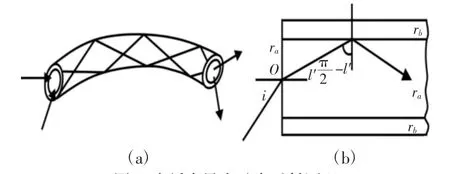
图2 光纤内导光及全反射原理Fig.2 Fiber Optic Light Guide and Total Reflection Principle
2.2 太阳追踪控制原理
本设备必须通过太阳方位追踪以实现光路。
2.2.1 太阳追踪控制系统组成
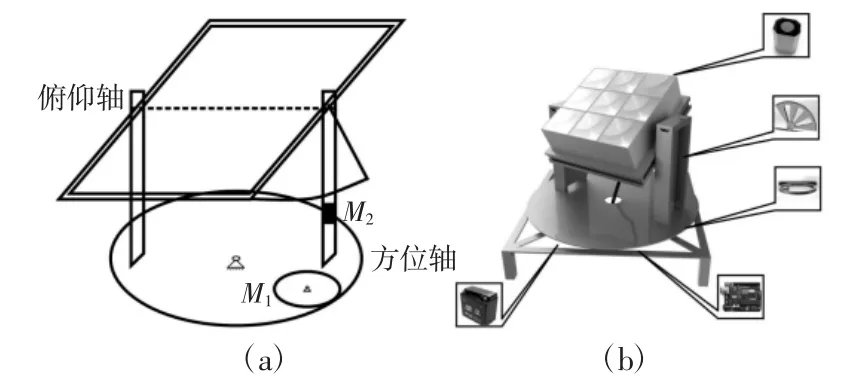
图3 追踪控制系统机械结构示意图Fig.3 Tracking Control System Mechanical Structure Diagram
太阳追踪装置的整体机械机构,如图3(a)所示。主要通过控制方位电机和俯仰电机进行角度调节,俯仰角度可在(0~90)°间调节,方位角度可在(±180)°内调节。该追踪控制系统采用基于ARM单片机的Arduino UNO控制板作为主控制器,通过GPS模块得到时间及坐标数据,通过光角度传感器检测偏差角度,经过数据采集和处理,控制步进电机执行相对应的运动,达到追踪太阳方位的目的。控制系统的结构框图,如图3(b)所示。主要包括主控电路(进行PID运算)、GPS模块、光传感器、步进电机及驱动电路、机械转动机构等。
采用基于光敏电阻的自制光角度传感器,其界面示意图,如图4所示。传感器安装平面与透镜平面平行。
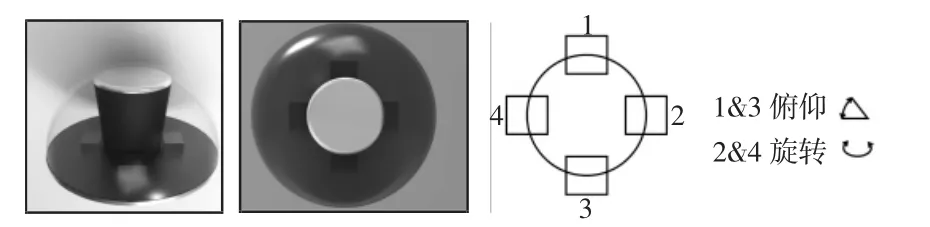
图4 跟踪状态检测单元及示意图Fig.4 Tracking Status Detection Unit and Installation Diagram
2.2.2 太阳追踪控制实现
本系统选用GPS天文学太阳方位角计算与光角度传感器双闭环控制方式。通过日期时间计算太阳方位角与高度角,并控制步进电机转动,使光采集器的透镜对准太阳方位,如图5所示。

图5 太阳能追踪控制系统框架图Fig.5 Solar Tracking Control System Framework Map
在实际设计过程中,考虑到天文学太阳方位计算庞大计算量以及该原理对设备安装精度极高要求,采用以下改进设计:(1)简化太阳方位计算公式,舍去部分误差补偿项以减少运算量。(2)由于光传感器具有追踪精度高、追踪范围小的特点,通过算法实现:低精度方位追踪主要依靠天文学算法,高精度对准依靠传感器和天文学算法共同计算,采用双闭环,在减小控制器整体计算负荷情况下,提高控制精度到较高水平[12]。
3 结构装置设计
3.1 机械部分设计
光采集器主体采用阵列式长方体铝采集盒,单个采集盒可独立完成光的汇聚和耦合,质量为 372g,尺寸为(90×90×13.8)mm。采集盒阵列由铝合金型材外框挤压固定,这样的小框架阵列结构其由于重量产生的弹性形变很小可以忽略。9个采集盒排列成3*3阵列作为采集器主体(由于采用模块化设计,本设备可经过简单修改实现任意不同数量和形式的阵列采集器),包括外框和转轴等零件的采集器主体质量在(4.9~5)kg之间,转轴径向承受的力F约为50N。转轴的轴线穿过整个采集器主体的重心,使静态下的转矩最小,并保证转动的平衡性。
这里做如下力学分析:采集器具有俯仰转动和方位角转动两个自由度。俯仰转动通过安装在采集器上转轴实现,转轴通过滚珠轴承安装在垂直安装的支架上,步进电机通过齿轮减速机构驱动采集器转动实现俯仰角转动。转动惯量I1为:

式中:m1—光采集器质量;I1、I2—光采集器垂直于转轴的两个边长。方位角转动通过圆盘的转动实现,垂直支架安装在直径450mm的圆盘上,圆盘通过同心安装的盘型滚珠轴承与底座连接,圆盘上安装有内花键齿轮与步进电机的输出轴齿轮啮合。整个转盘上机构质量m2为(8.9~9)kg。圆盘转轴穿过光采集器的质心,转盘上机构转动惯量I2为:

其中,r近似使用转盘半径计算,实际转动惯量不大于I2。
由于两个自由度的设计都让转轴穿过质心,当设备保持在某一角度静止时,理论上需要的力矩为零。齿轮减速机构具有力矩变换作用,理论上步进电机需要提供的保持力矩将接近零(不能为零,否则电机会失步导致角度改变)。
3.2 电机及减速系统部分设计
驱动电机采用四线两相混合式步进电机42FH03-01。步距角1.8°,步距角精度5%。额定电流0.8A。保持转矩0.3N.m,20mm边缘处最大径向力28N。最大温升80°C。
驱动器采用驱动电流可调,细分数可调的M335步进电机驱动器,设置为32细分状态,可设置保持转矩半流功能。
俯仰自由度的齿轮减速机构减速比100:6,水平转动自由度的齿轮减速比90:8。
俯仰运动电机接收到1个脉冲时俯仰角的变化角度θ1为:

水平转动电机接收到1个脉冲时方位角的变化角度θ2为:

通过计算得到的转动精度较高,实际追踪太阳方位过程可以实现无跳变的平滑追踪。
由于太阳位置变化非常缓慢,使用过程中多数时间电机实际需要输出转矩远远小于额定转矩。为减少电能消耗,将驱动器设置为较小电流。
3.3 控制部分设计

图6 控制流程图Fig.6 Control Flow Chart
控制器采用基于ARM单片机Arduino控制器作为其控制核心。传感器信号包括GPS时间、GPS坐标、光照强度、光照角度、电池电压等。
控制器在蓄电池电量正常时开启,读取GPS芯片的数据,根据GPS经纬度坐标位置,GPS日期时间等数据计算当日的太阳高度角和太阳方位角,并将坐标点记录为当天的坐标数据。为减少计算量,太阳高度角和方位角用精度较低的近似公式计算,运行过程将通过光角度传感器反馈控制得到更高精度。
控制程序主要包括角度的运动控制和能源利用效率控制两部分。控制流程,如图6所示。
3.3.1 运动控制环
采用闭环控制。通过读取GPS坐标和GPS日期时间计算出太阳的位置坐标,根据实际电机角度,通过PID运算转换为电机控制信号,控制电机转动从而使光采集器透镜正对太阳方向。光照角度传感器检测透镜相对太阳的实际角度并根据反馈的偏差值对控制信号进行修正,形成闭环控制。
3.3.2 能源效率控制环
根据实际太阳方位变化速率,采用每隔30s进行一次角度跟踪的方案,避免实时跟踪造成大量电能消耗。控制器通过对光照强度和蓄电池电压监控,使整个系统在光照强度过低时采取停止角度跟踪或关闭控制电源方式减少电能消耗。
4 照明实验及数据分析
光采集器实物图,如图7所示。规格为:(700*700*500)mm。设备安装于楼顶平台处进行实验测试。实验时在光采集接收器上安装温度传感器,用于检测温度数据。

图7 光采集器试验装置实物图Fig.7 Light Collector Test Device
实验过程中集光装置能够平稳追踪太阳方位,同时在光输出端光照稳定,亮度均匀,没有出现光照间断或亮度变化。同时对其实验过程做了进一步的光功率和电功率等数据的测试如下。
4.1 光照强度测试分析
数据采集于时间:2018年1月份,坐标:位于经度111.65°E,纬度 40.82°N。
测试仪器选择TES1339型专业级照度计。实验设备的集光面积共69,696mm2,200Db/km的塑芯光纤长度1m,光纤直径规格5mm,利用带有φ5mm开孔的暗箱进行数据测量。该装置理论设计聚光倍率可以达到394倍以上。在太阳角度和阳光色温有代表性的时段,进行一系列光强度实验测试结果,如表1所示。
该装置在阴天工作效率非常低,如表1所示。但光照良好的晴天工作效率较高,适宜安装在晴好天数比例较多的地区;同时,根据表中数据可以看出,在光照良好的中午,在暗室内可提供的光照强度大约相当于正对太阳方位开边长21cm的正方形窗户,照明效果符合预期要求,传递效率达到60.9%以上,实验效果良好。
一日内从早晨9点到17点每隔一个小时测量光采集器光强度及光传递效率变化规律点线图,如图8所示。从图中可看出,晴天光采集器光纤输出光强度图8(a)大致呈现下抛物线形状,在午间(12:00~14:00)呈现达到最高值,早(9:00)和下午(17:00)相对低些;但其晴天光传递效率正相反,如图8(b)所示。呈现上抛物线形状,午间相对低些,早和下午相对高些,这主要是因为正午阳光含有更多比例短波长的蓝紫光,而短波长光更容易产生折射,降低了效率。
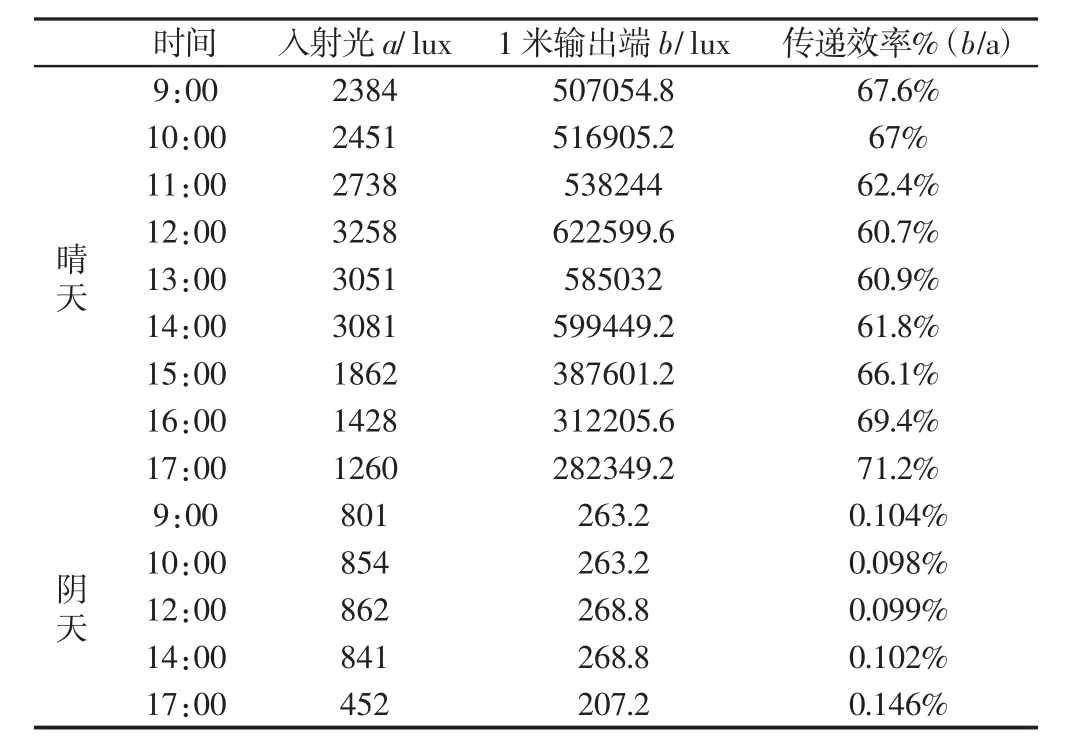
表1 光采集器光强度测试实验结果Tab.1 Light Collector Light Intensity Test Results
根据图8(a),图8(c)还可看出,阴天光采集器光纤输出光强度非常低(阴天几乎无平行光,无法实现理论设计的光路传输)。设备几乎不能进行照明,且早、中、下午变化不明显,且光传递效率也极低,故本设备在阴天不具有使用价值。
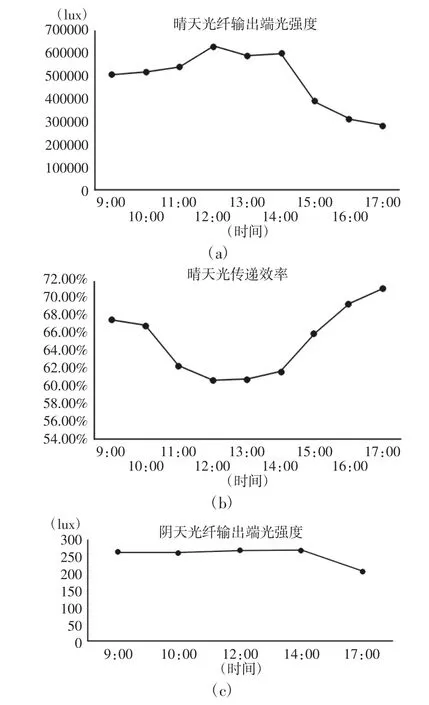
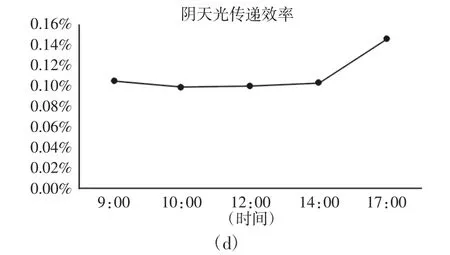
图8 光采集器光强度测试实验结果折线图Fig.8 The Line Chart of Light Collector Light Intensity Test Results
4.2 耗电功率测试分析
本设备为满足节能环保要求,设备采用自我供电方式设计,采用12V电瓶作为储能电源,通过三块太阳能电池板共28W为其充电。为检测其全天候电源消耗和储备性能,本实验对晴天、阴天(阴天光强度低于门槛时设备处于保护状态,运动机构不工作)等天气状态下设备储耗电情况进行测试,以每日24h作为一个周期,进行测试,数据如表2、表3所示。晴天设备的日总耗电量低于光伏发电总量(3.6+3.2-8.9=-2.1AH),如表2所示。通过蓄电池的缓冲作用,可以满足全天耗电需求。根据表3数据,阴天的发电量较低,耗电量也维持在较低(阴天设备处于保护停机状态),总耗电量仍小于发电总量,其数据为(0.4+1.6-3.25=-1.25AH)。因此无论晴天还是阴天,设备自身电力需求可以完全依赖自身发电,无需对其进行额外供电。这也实现了设备安装使用过程中简化,只需布置光纤,无需进行电线布置。同时,从表中还可以看出,晴天耗电量相对较大,这是因为:晴天采集器的运动装置和控制装置处于连续工作状态,运行中需要用电量相对较大,而阴天设备感应不到阳光,运动装置及控制装置处于非连续工作状态,故耗电量相对较低。

表2 晴天光采集器平均耗电功率测试实验Tab.2 Light Collector Power Consumption Test in Sunny Day

表3 阴天光采集器耗电功率测试实验Tab.3 Light Collector Power Consumption Test in Cloudy Day
4.3 散热系统分析
光采集器的重点结构采用铜质散热,热导率较高,在实验过程中最高温度维持在55°以下(光纤耐热允许范围为(-40~80)℃),即温度没有超出光纤材料允许范围,满足长时间使用要求,故光接收端在使用中不会产生高热而烧毁。
5 结论
采用自制光照角度的传感器,基于双轴跟踪方式,采用基于ARM的控制器及双闭环PID控制算法设计了一种太阳追踪控制系统,并设计了光采集和传导装置。结果表明:(1)光采集器的追踪精度达到设计要求,满足跟踪需求。(2)光采集器的散热设计满足长时间使用要求,光接收端在使用中不会产生高热而烧毁。(3)整个系统的能源控制算法满足要求,自身发电可满足系统的能耗要求。(4)本照明装置在实验中光照强度的传输效率达到60%以上,具有研究价值。