基于特征融合的目标检测技术研究
2018-12-17孙铭镭杨波韩立园
孙铭镭,杨波,韩立园
(长春理工大学 电子信息工程学院,长春 130022)
目标检测的难点在于如何在环境中找到目标物的特征,从而准确的检测。现如今对于目标特征的检测主要有几种:(1)对于目标颜色特征的检测方法,如:Arya P.Unnikrishnan[1]等人提出的利用颜色特征来检测车牌的研究和张慧君[2]提出的目标颜色检测与跟踪系统;(2)对于目标纹理特征的检测方法,如:João Batista Florindo[3]等提出了一种基于离散Schroedinger纹理特征的新方法和程淑红[4]等利用纹理特征来检测汽车型号的方法;(3)对于目标轮廓特征的检测方法,如:Paraic Quirke[5]提出利用轮廓特征检测铁路桥损伤检测和史思琦[6]对轮廓特征的提取、描述和评价这一主题展开研究;(4)对于目标局部特征描述子的检测方法,如:李根[7]提出的基于局部特征的人脸检测和崔广才[8]提出了一种基于傅里叶与局部特征结合的人体姿态识别方法检测的方法;(5)对于目标混合特征的检测方法,如:D.S.Jang,H.I.Choi(2010)[9]提出了一种基于图像检测的模型,通过对目标物体的移动产生的图像序列的检测。然而这些检测的方法都有局限性,如在复杂的环境背景下检测的准确性会有所降低或者检测方法复杂。本文采用颜色特征和轮廓特征相融合的检测方法,能够在复杂的环境下提升检测的准确率并且检测起来更加简便。
1 目标检测原理
由于使用数字化所表示的图像数据维数一般都很高,所以如果直接对目标图像所在的原始数据进行操作或者处理会变得比较困难。为了便于使用,通常对数字图像进行各种处理和操作以提取图像本身的各类特征。事实上,对物体的认知也是建立在对物体特征的分类和描述的基础上得来的。人们了解事物的过程就是将目标表示为各种特征的组合,这样才能对各种特征进行准确分类并与已知的特征进行比较和判别,得到理想的目标。所以,对于目标检测,可以理解为通过使用合适的描述目标的特征描述方式寻找某类特征,在得到特征后与已知数据相互比较,得出相似程度,最终实现目标的分类和检测的过程。从之前的介绍可以看出,特征的相似度判别和目标特征及其描述方式是决定检测准确度的关键一环。
考虑到环境背景、技术手段、应用场合等因素的影响和限制,为了获得准确的检测数据,选取合适的方式来获得最佳目标特征就变得十分重要。一般来说,在目标检测过程中,在进行特征描述和选择时需要考虑的几个主要因素有:独特性、显著性和稳定性。
(1)独特性。在目标检测时会有许多的干扰物,而如何区分干扰物和目标,就要在选取特征时,选取一个目标所具有的独特的特征,该特征可以把目标和干扰物准确的区分开来,这就被称作目标的独特性。能否有效的选取具有独特性的目标特征,会影响到在检测上的效率和准确性,而往往使用一种特征无法准确的区分目标和背景。
(2)显著性。选取的特征是否能够反映出目标所具有的特性或者可以代表目标的特性被称作特征的显著性。每个物体都有许多不同属性和类别的特征,而在不同的场景下如何选取合适的特征,使该特征能够更加准确和容易的检测到目标是在目标检测时一个很重要的环节。
(3)稳定性。如果在一种场景中准确的检测到了目标,而当场景变化时却无法找到目标,这时就可以说所选取的特征稳定性不够。特征的稳定性可以说是在外界环境变化时,依然可以使用之前的特征准确检测到目标,但是往往使用单一特征很难做到这点。
为了能够有效地检测到目标,在选取目标特征时应尽量考虑到这三点特性,并最大程度的满足这三点。但是在现实环境中,有来自目标遮挡、物体运动和噪声等因素的干扰,很难使用单一特性同时满足这三点。所以本文采用目标颜色及轮廓特征融合的方式使来检测目标,从而更好的抓取目标特征的显著性与独特性,从而提高检测准确率和稳定性。
2 基于HSV色彩空间的颜色特征检测
色彩空间模型是一种描述使用一组值表示颜色的抽象数学模型。本文使用的是HSV色彩空间模型,这种色彩空间模型具有能够非常直观的表达色彩的明暗、色调,以及鲜艳程度的特点,这个特点可以利用到目标的颜色特征的获取。
2.1 HSV色彩空间
1978年美国的计算机科学家埃尔维·雷·史密斯提出了HSV色彩空间模型这个概念,它是由RGB色彩空间模型的一种非线性变换得来的。
HSV色彩空间中的H、S和V分别代表着色调(Hue)、饱和度(Saturation)和明度(Value)。其中H是色彩的基本属性,用角度来度量它。色调H取值范围为0-360°,如果按逆时针方向同时从红色开始计算,则可以知道红色、绿色和蓝色分别为0°、120°和240°。而它们的补色是:黄色、青色和品红,使用色角度表示分别为60°、180°和300°;S是指色彩的纯度,取值范围为0-100%,S越高色彩越深并且艳丽;V是指色彩的明亮程度,取值范围为0(白)-100%(黑)。HSV色彩空间模型如图1所示。

图1 HSV色彩空间模型
2.2 颜色特征检测
首先对图像作预处理(图像作灰度化、二值化和滤波)。将图像预处理后,将图像进行RGB到HSV色彩空间的转化,做完准备工作后就可以进行对目标的颜色检测了。算法流程图如图2所示。

图2 颜色检测流程图
2.3 HSV转换与颜色特征的检测
RGB转化到HSV是有数学理论依据的,设max为R、G、和B中的最大值,而min为它们中的最小值,则转换公式如(1)、(2)和(3)所示:

在进行完预处理和HSV转换后,对于图像的颜色特征检测就可以开始了。在进行颜色检测后将得到的颜色检测特征数据与目标所在的原始图像颜色数据进行作差比较,最后得到的差值与阈值作一个比较,小于阈值的像素点就是目标像素点。
其中阈值的选择使用动态阈值。使用Otsu[10]方法来确定阈值。Otsu方法是一种最佳全局阈值处理的方法。但是该方法比较复杂,本文对Otsu进行了一些算法的改进。假设原图是一副大小为M*N的像素图像,令{0,1,2,…,L-1}为图像的L个不同灰度级,同时选择一个阈值k,阈值k把图像分割成了两部分,T1和T2,其中T1由图像中灰度值区间在[0,k]的像素组成,并记像素个数为N1;而T2由灰度级区间在[k+1,L-1]像素组成,并记像素个数为N2。则有像素被分类到T1中的概率P为:

同理可知像素被分类到T2的概率P2为:

被分配到T1、T2的像素的平均灰度值m1、m2分别为:


整个图像的平均灰度mG为:

则类间方差σ2为:

将公式(8)代入(9)中可得:

通过公式(10)可以看出,两个均值m1和m2彼此间隔越大,则σ2越大,所选取使得σ2最大的k值。
颜色检测的结果如图3所示。

图3 颜色检测结果
3 轮廓特征检测
如图3所示,可以看到在目标的颜色特征和环境背景有相似的时候,很容易产生错误的检测结果,导致目标检测的失败。因此加入了对于目标轮廓特征的检测,来提高检测的正确率。
对于图像的轮廓检测过程由以下五部分组成:图像预处理、对于目标的检测、图像的目标分割、图像的目标特征提取与选择、图像的目标分类,如图4所示。

图4 图像轮廓检测流程图
(1)图像预处理:为了提高目标与背景还有其他干扰物的对比度,增强数据的有效性和可用性,从而在图像处理时做到事半功倍的效果,在目标检测前先做些图像的预处理。
(2)目标检测:在图像中有一些区域可能是目标所在的地方,而目标检测的目的就是把这些区域划分出来。
(3)图像分割:分割的依据就是目标检测中得到的可能存在目标的区域。从而把图像分割成若干个特定的目标区域。边缘轮廓检测使用边缘提取技术来确定目标的边缘位置。本文图像分割选取前文介绍的阈值法中的Otsu方法。
(4)特征提取与选择:目标的提取,就是要计算每一个所知目标的特征向量。在计算完成后就能够区分在图像中每个物体的独特特征。而特征选取是为了获得一些有用的数据,从而可以让目标和干扰物之间产生最大差异,这样可以提高下一步中目标分类的计算效率和准确性。
(5)目标分类:在完成上面几步的处理后,开始对目标进行分类。分类的过程就是将在图像中的检测到的每个目标的特征矢量与已知的目标的理想特征矢量进行一一比较,每次进行特征比较后,都会给该目标一个与所要检测的目标相似的概率,在将所有可能是目标的特征向量进行计算比较后,再将所得到的相似概率与门限值作比较,如果超过门限值的相似概率过多,则将具有最高相似概率的目标看成所要检测的目标。
对于目标的轮廓检测结果如图5所示。

图5 轮廓检测结果
4 颜色与轮廓的混合特征的目标检测
在颜色特征和轮廓特征的检测图中,检测信息不是相互排斥的,而是互相补充的,检测信息的融合可以使目标物的信息更加完整。同时,能够更加准确的检测目标。首先进行颜色和轮廓检测,假设颜色检测完成后有N个颜色符合目标,而轮廓检测后有M个符合目标轮廓,此时进行融合,同时符合两种特征检测的为目标物。算法流程图如图6所示。
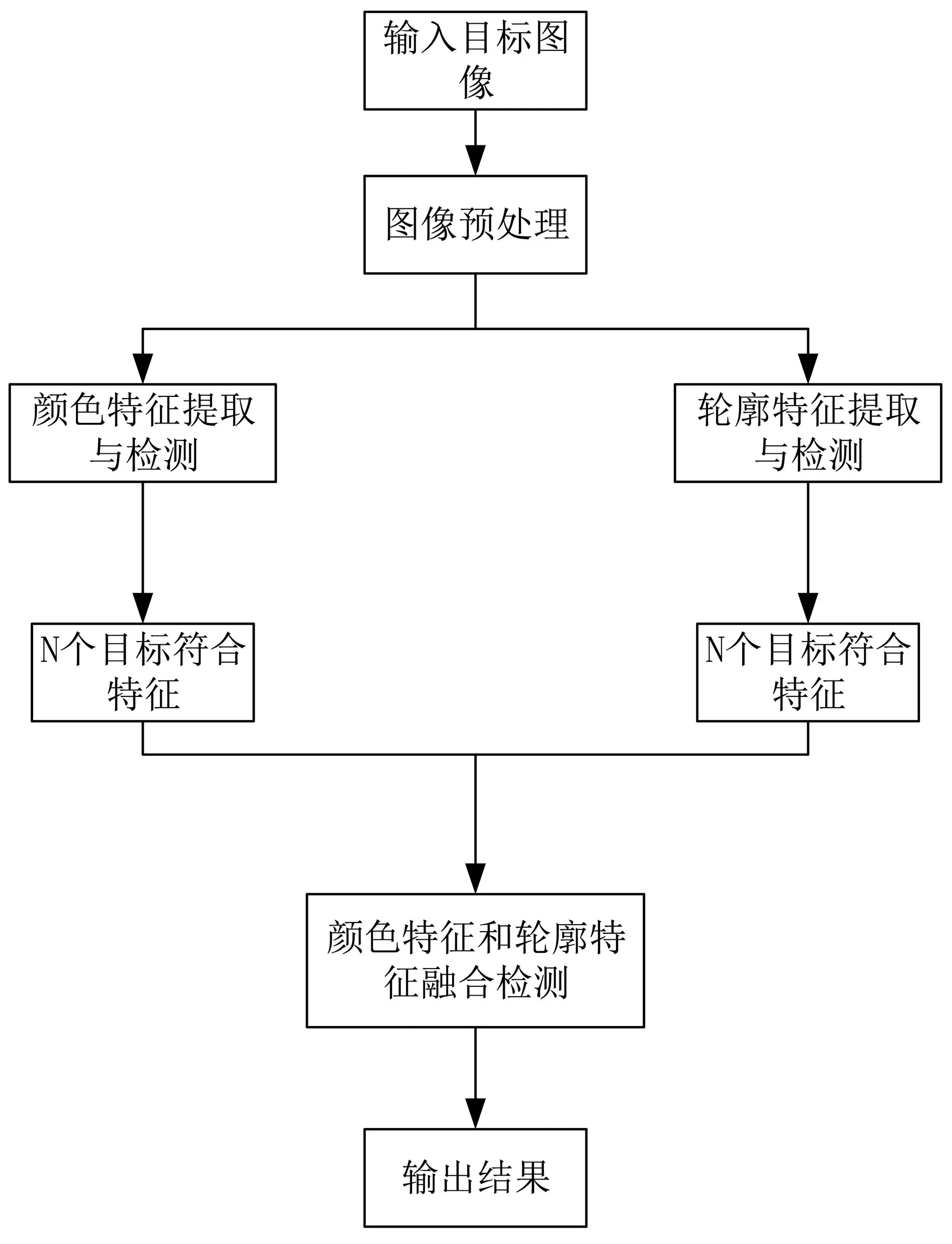
图6 颜色特征和轮廓特征融合检测流程图
5 实验结果与分析
通过颜色特征和轮廓特征的融合检测的到了如图7所示的结果,可以看出对于目标和背景颜色差别很大,只用颜色检测就可以很好地检测出目标物。然而,在背景颜色与目标颜色近似时,当单一用颜色检测时,会将与目标颜色相近的物体全部检测,导致结果不准确。同理,当对目标进行轮廓检测时,目标轮廓在环境中与其他物体的轮廓差异很大,则可以很好地检测出目标物。但是,当有其他物体和目标物有相似的轮廓时就会干扰检测结果,导致结果出错。
因此采用了颜色检测和轮廓检测的融合检测,可以看到实验结果显示,在复杂的环境情况下,能够做到准确的检测到目标物。
6 结论
在复杂的环境下对目标进行检测存在着很多限制和不稳定性,因而单单使用一种特征方法进行检测很容易出现误检测和检测准确率下降等诸多问题,因此使用多特征相结合检测的方法有利于提高检测的准确率和稳定性。通过实验结果可知本文所使用的颜色特征和轮廓特征相结合的方法,能够有效的在复杂环境下准确检测目标。

图7 融合检测结果
