永磁同步电机矢量控制系统仿真研究
2018-12-15史激特葛黎新宋璐窦群
史激特,葛黎新,宋璐,窦群
(陕西中医药大学医学技术学院,陕西咸阳712046)
相比传统感应电机,永磁同步电机有着启动转矩大,力能指标好,功率因数高等优势,并且体积小、质量轻、结构简单。我国稀土资源储量丰富,永磁同步电机制造成本相对较低,故其在三航及军用民用等领域运用越来越广,逐步取代传统感应电机占主导地位[1-3]。
虽然永磁同步电机在诸多领域优势明显,但由于其数学模型复杂,且强耦合,非线性。对该被控对象的研究我国现阶段相对于发达国家比较滞后,故对永磁同步电机矢量控制系统进行仿真实验,意义重大,为实际工程实践打下坚实的理论基础。
上世纪70年代,Blaschke等人在联邦德国的SIEMENS公司,提出对交流电机进行磁场定向控制,即矢量控制理论[4-6],该控制理论运用数学变换(Clark、Park变换),实现永磁同步电机复杂数学模型的解耦。该理论如今已成为较成熟且优先选取的控制策略之一。
本文在推导永磁同步电机的数学模型、矢量控制原理分析的基础上,运用MATLAB/Simulink对转速电流双闭环永磁同步电机矢量控制系统进行空载减速、突加负载仿真实验,并对实验波形分析,验证了本文控制策略的可行性[7]。
1 电机的数学模型
电机坐标系如图1。A、B、C轴沿电机定子的轴线方向,彼此相差120∘。α轴与A轴重合,β轴逆时针超前α轴90∘。d轴在转子永磁体的N极上,q轴逆时针超前 d轴 90∘[8-9]。
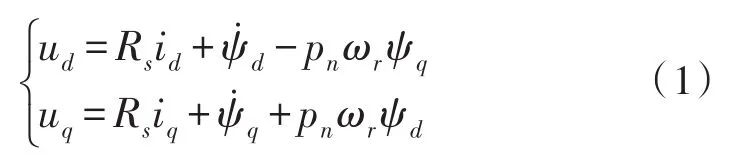
在理想的条件下,电机在dq轴坐标系中电压方程
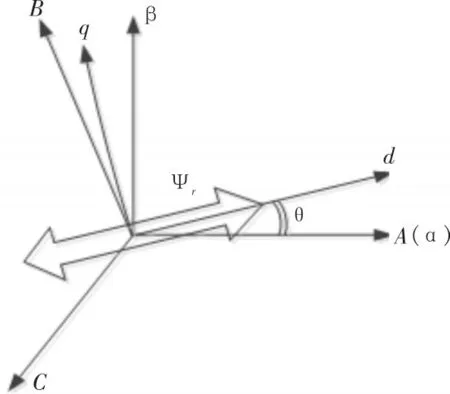
图1 电机坐标系
磁链方程

将(2)式代入(1)式得电流方程

电磁转矩方程

运动方程

综上,电机状态方程

其中,pn极对数,ud、uq电压d、q轴的分量,id、iq电流d、q轴的分量,ψd、ψq磁链d、q轴的分量,Rs定子绕组的电阻,ωr角速度、ψf转子的磁链,Ld、Lq电感d、q轴的分量,J转动惯量,B摩擦系数,TL负载转矩。
2 矢量控制原理
电机矢量控制的策略有4种,见表1。这4种策略都是为了达到对三相定子电流的控制从而提高转矩控制性能。
以上4种矢量控制策略中最大转矩/电流比适合永磁同步电机,该控制策略可提高电机在高转速时的性能,但其运算复杂,在实际中,对程序员编写代码挑战较大;cosφ=1、恒磁链控制能获得较大功率因数,适合高功率永磁同步电机,但使用这两种控制策略易使永磁同步电机退磁[10];id=0是最普遍且简单的控制策略,根据公式(4)若使id=0电机的电磁转矩为
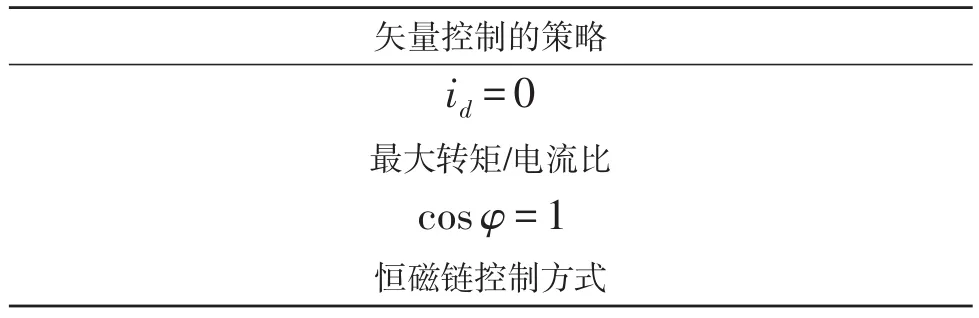
表1 矢量控制的策略

从公式(7)可以看出采用id=0这一控制策略电机输出电磁转矩最大,且电流最小;极对数pn,转子磁链ψf为常量,电磁转矩Te与电流q轴分量iq成正比例关系,同时若令id=0有

其中ia、ib、ic为电机三相定子电流,显然,想要提高转矩的控制性能,控制ia、ib、ic即可。综上所述本文采用id=0控制策略。
3 系统仿真
根据上文推导出的永磁同步电机数学模型及id=0控制策略,在MATLAB/Simuli-nk中搭建电流、转速双闭环矢量控制系统进行仿真实验[11-12],如图2。由于本文为日后工程实践做理论铺垫,故本次仿真实验选取的电机参数与工程项目中相同。科尔摩根公司制造的M-103-A电机,具体参数见表2。
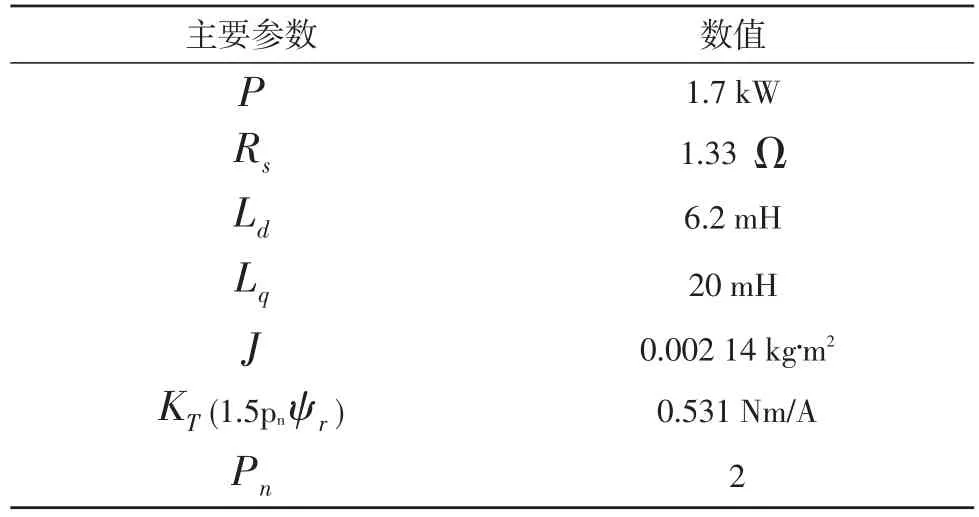
表2 电机主要参数
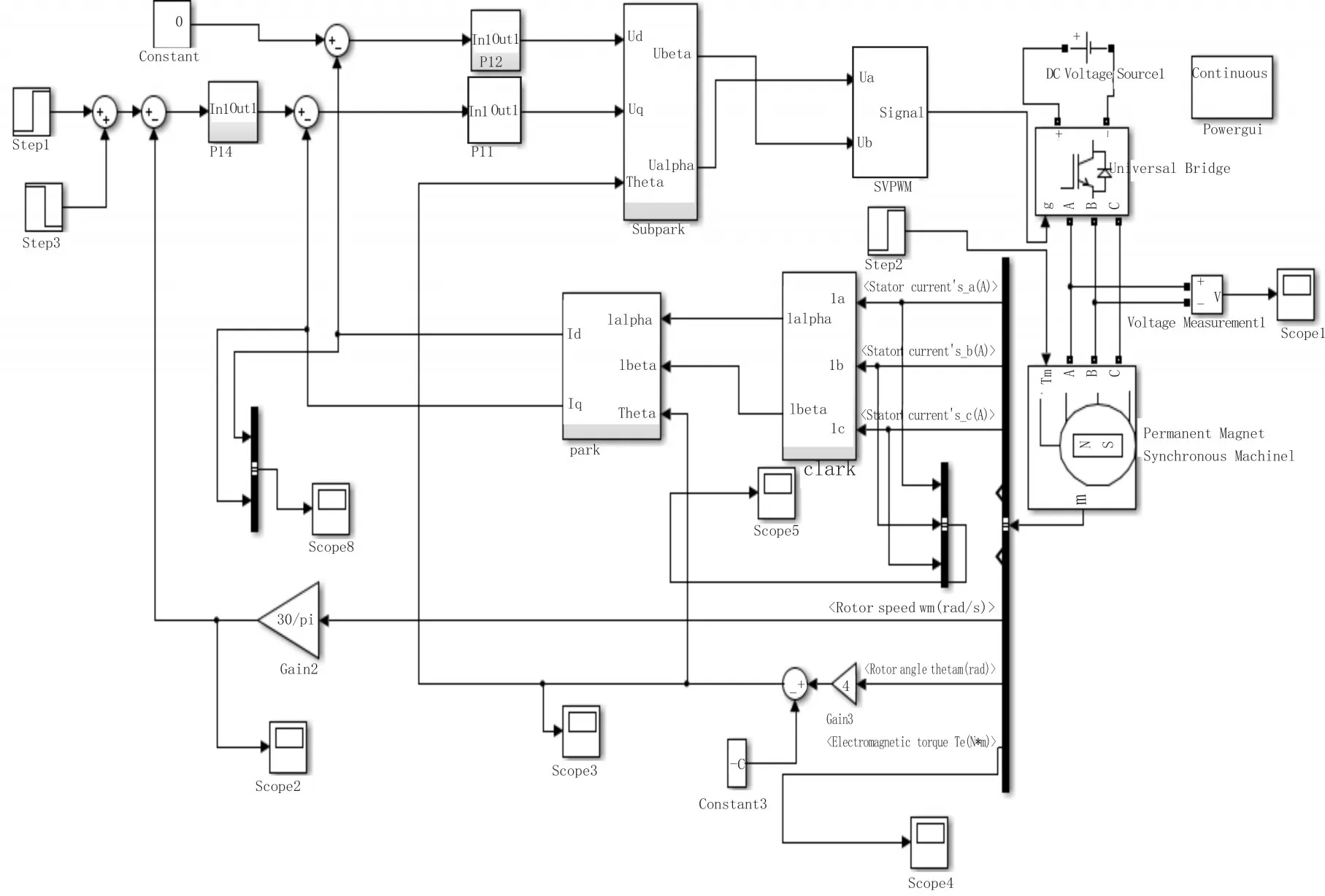
图2 永磁同步电机矢量控制系统仿真模型
将电机的主要参数输入电机模块后,还需对Simulink中仿真参数做进一步的设置,本次仿真实验参数设置见表3[13]。
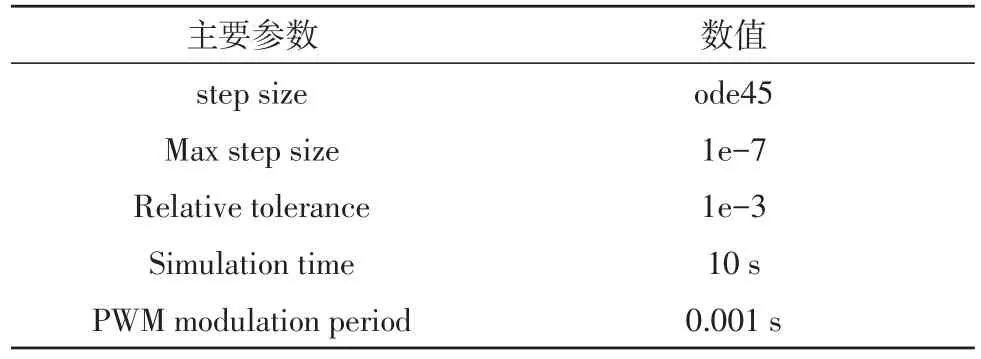
表3 Simulink仿真参数
3.1 空载减速仿真实验
设置仿真系统在不带负载的情况下以1 000 rpm转速启动,在系统运行到第五秒时,令电机突然减速到500 rpm,观察电机ia、ib、ic,转速n、Te仿真波形如图3所示。
从仿真波形来看,ia、ib、ic在电机启动初期1 s内有轻微脉动,随后迅速进入稳态;同样电磁转矩波形也在同时段有轻微脉动,但之后也同样进入稳态;电机转速在启动瞬间快速提升,在0.5 s到1 s这一时段有轻微脉动,1 s后维持在给定转速1 000 rpm。第5 s电机突然减速,ia、ib、ic及电磁转矩出现轻微脉动,约1 s重归稳态;电机转速快速下降至仿真实验要求的500 rpm,在稳定前有轻微脉动。
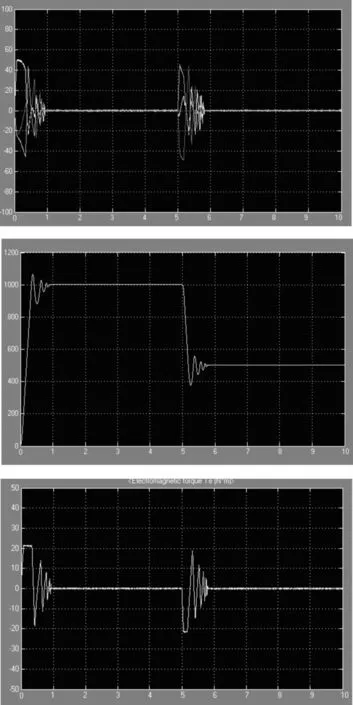
图3 ia、ib、ic,速转,电磁转矩速仿真波形
3.2 突加负载仿真实验
设置仿真系统在不带负载的情况下以1 100 rpm转速启动,系统运行到第五秒时,突然加入负载,大小10 N·m,观察iA、iB、iC、id、iq,Te,转速n仿真波形。如图4、5所示。
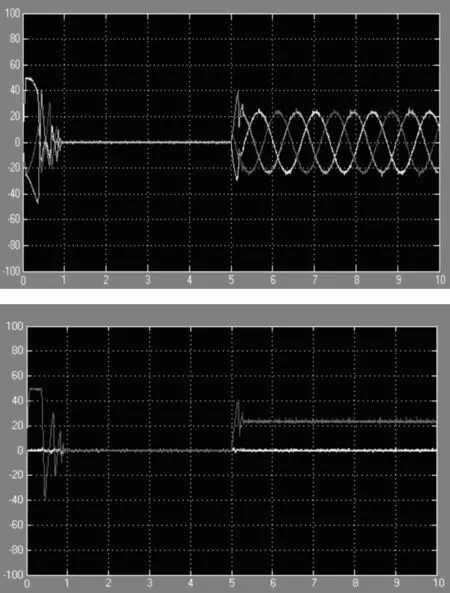
图4 id、iq、ia、ib、ic仿真波形
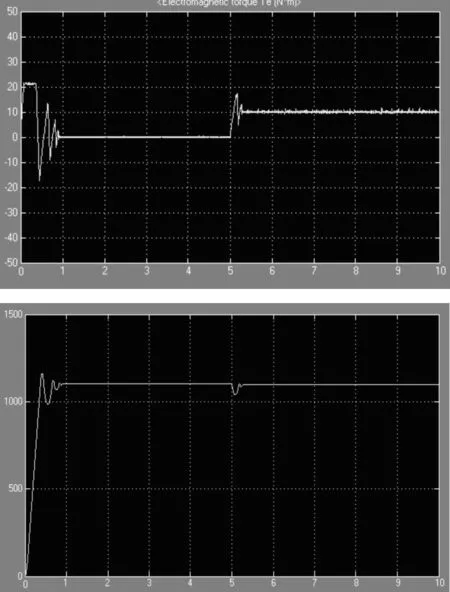
图5 速转、电磁转矩仿真波形
从仿真波形来看,ia、ib、ic、iq、Te在电机启动初期1s内有轻微脉动,随后迅速进入稳态;由于采用id=0控制策略,id波形衡为零;电机转速在启动瞬间快速提升,在0.5 s到1 s这一时段有轻微脉动,1 s后维持在给定转速1 100 rpm。第5 s突然加入负载,ia、ib、ic波形呈相位相差120∘的正弦波,且曲光滑无毛刺;iq约21 A;转速在此刻有轻微的下降,但在很短时间重回1 100 rpm;Te升至10 N·m,电机进入新的平衡[14-16]。
4 结束语
文中通过推导永磁同步电机的数学模型结合矢量控制原理,在MATLAB/Simulink中搭建了电流、转速双闭环矢量控制系统并且进行仿真实验,实验结果证明,该永磁同步电机矢量控制系统速度响应快,可调范围广,抗干扰能力强,电流、转矩波动小,完全可运用到工程实践中,本文也为后续实践打下了理论基础。