基于LORA技术的无线在线振动监测系统
2018-12-15王明吉崔青巍李玉爽
王明吉,崔青巍,李玉爽
(东北石油大学电子科学学院,黑龙江大庆163318)
随着科学技术的快速发展和现代工业自动化水平日益提高,现代旋转机械设备日益大型化、复杂化、自动化、连续化、集成化、智能化,给人们生活带来了便利。但受现场环境影响、设备老化、操作不当等原因,经常会出现各类机械故障[1]促使了人们对机械设备振动故障监测技术的研究。但是现有较为成熟的机械设备状态监测系统,大多数采用有线监测技术将振动传感器采集到的模拟信号通过AD转换成数字信号被处理器处理和分析。但是这些振动监测系统存在布线复杂、、成本高、其结构和功能比较单一,可维护性差和灵活性差等缺点[2]。因此,设计了基于LORA技术的无线在线振动监测系统,本系统将由信息采集模块、电源模块、无线传输模块、上位机、下位机等部分组成。此系统具有功耗低、灵活度高、操作简单、性价比高、、精度高、存储数据等优点。对机械振动监测具有重要工程意义和一定的学术价值。
1 系统组成及工作原理
基于LORA技术的无线在线振动监测系统如图1所示,采用基于ARM Cortex-M3内核的32位单片机STM32F103C8T6作为主控制器。数字输出加速度传感器LIS3DH作为振动检测模块,检测旋转机的振动信号。采用SX1278为核心器件的无线模块,实现上位机与下位机的数据互传。上位机服务器需要采集振动数据时发送传感器的激活命令到下位机。振动传感器开始进行数据采集,下位机对采集到的振动信号进行处理和分析,通过相位插值法对振动信号的幅值修正,通过相位差法对信号的频率和相位进行修正,得到准确的加速度数值,对所得的加速度信号积分,得到速度和位移的准确值[13]。在发送模式下,仅在需要发送数据包数据的时候才会启动射频模块,将数据发送到上位机并在上位机界面显示出来,显示出准确的加速度、速度、位移等数据,同时会生成表以便工作人员查阅。
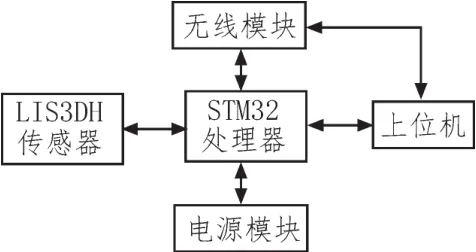
图1 系统组成
1.1 无线模块
Sx1278收发器主要采用LORA远程调制解调器,用于长距离扩频通信,不仅抗干扰能力强,而且功耗低,是一种高度集成低功耗半双工小功率无线数据传输模块。当SX1278工作在LORA模式时,能获得超过-148 dBm的高灵敏度,通信距离最远可达5 km。其电路图如图2所示。
1.2 传感器模块
文中采用的传感器模块是ST公司推出的低功耗、高性能并且内置有限状态机的三轴高分辨率加速度传感器,其供应电压范围为1.71~3.6 V,有±2 g,±4 g,±8 g,±16 g不同量程范围,本次选用的传感器量程为±16 g。

图2 无线模块电路
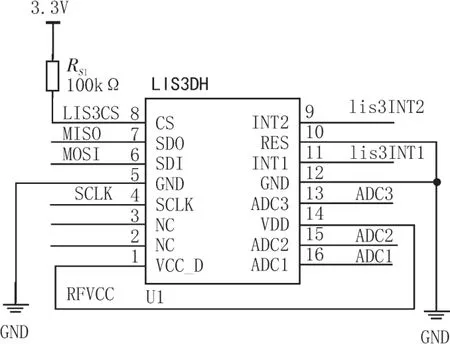
图3 加速度传感器电路图
1.3 电源电路模块
Xc6206是一款精度高,功耗低,噪音低、电压稳定,正电压调整器的芯片,其包括一个电流限制电路、驱动晶体管、精密参考电压源和一个误差校正电路。可以用电池供电满足无线传输的基本要求,其电压范围为1.2~5 V,间隔为0.1 V如图4所示为系统的电源电路图。

图4 XC6206电源电路原理图
2 算法原理
相位差校正的基本原理为:对一个信号用相同的采样率进行连续两次非周期采样,且两次采样间隔和采样点数相同,即频谱分辨率相同。对两段信号进行FFT变换得到FFT谱,利用两次谱分析同一位置处的谱线的相位差校正出该谱线处的实际校正值,然后利用其频率校正量估计出相对准确的相位和幅值[9-12]。
2.1 校正原理
对信号x(t)加对称窗w(t),其窗函数长度为T(T=N/fs),进行傅立叶变换有:

其中wT(t)=w(t-T/2),由对称窗w(t)在时域上平移T/2得到根据FFT的奇偶性可得,当w(t)是实偶函数时,其FFT变换的W(f)也为实偶函数,由其时移特性可得:

设有一周期信号x(t)=Acos(2πf0t+θ),其傅立叶变换为:

其中傅立叶变换后的频率变量为f,根据卷积定理加窗后的谐波信号x(t)wT(t)的FFT可表示为:

只考虑正频率部分,所以加窗后的相位为:

频率修正量为△f=f-f0,由式(5)可以看出相位和频率修正量在函数主瓣内的线性关系。
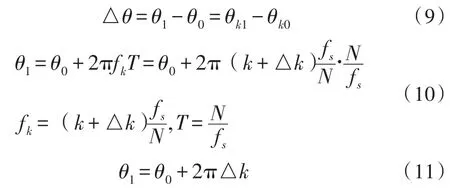
由于频率修正量和谱线修正量△k∈[-0.5,0.5]之间的关系为:

将T=N/fs带入到式(5)和式(6)可得:

2.2 相位差校正法的实现
采连续两段原始信号x(t)样本,每段取相同的点数(N),采样频率为fs(满足采样定理)。其中第一段序列x0(n)的起点为1,终点为N,第二段序列x1(n)的起点为N+1,终点为2N。分别对两段序列加汉宁窗,并进行FFT,由于变换后的相频函数在主瓣内不但具有线性关系,而且斜率相同。

相位校正量为:
所以归一化的频率校正量为:

K代表峰值谱线号,分析点数为N。窗函数的频谱摸函数为f(x),yk为谱线为k时的FFT的幅值。所以幅值的校正公式为:

所以加汉宁窗校正后的幅值为:

2.3 相位差算法仿真分析
用计算机生成信号式(15)的信号,利用MTALAB软件进行仿真验证,采样频率取fs=1 024 Hz,傅里叶变换谱分析点数N=1 024,则频率分辨率△f=fs/N=1 Hz,选用汉宁窗,进行仿真研究。

分析仿真结果如表1所示。
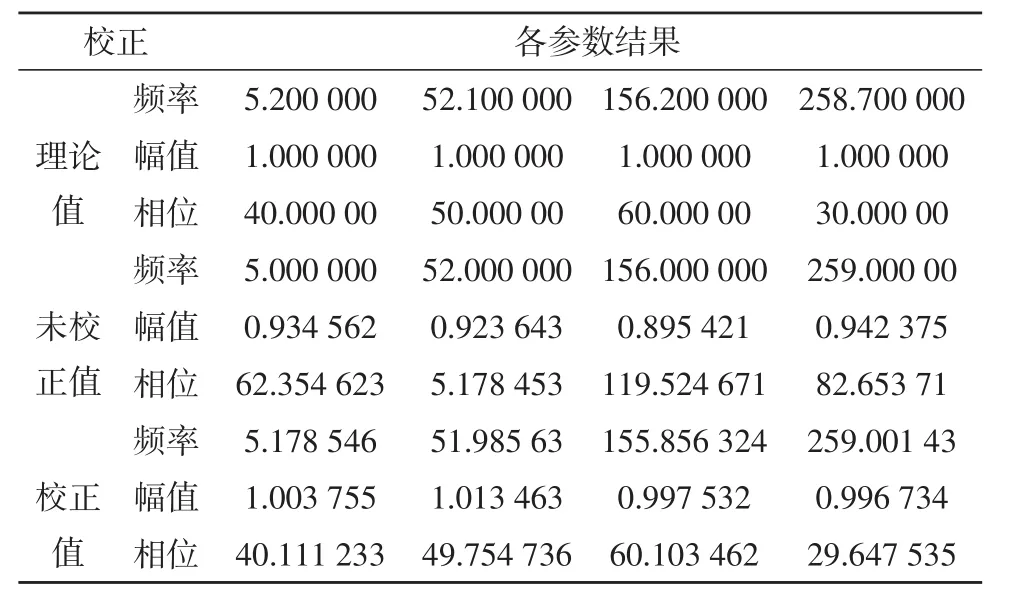
表1 加汉宁窗校正前后的对比结果
我们从表中可以得出如下结论:
1)由常规FFT谱得到的各频率成分的幅值和相位与理论值相差较大,尤其是相位,通过相位差算法,可提高校正精度,使其接近理论值。
2)采用相位差校正方法时,当点数足够多时,负频率成分的干涉影响很小,频率为5.2 Hz的信号校正精度较高。
3 实验与数据分析
本次设计的无线在线振动监测系统对上位机软件的实时性要求较高,所以上位机的开发环境采用MicroSoft Visual Studio 2010,利用高级程序设计语言C#设计上位机显示界面。我们可以从图中得到加速度(有效值)、速度(峰值)、位移(峰峰值)、转速等物理量。图5为无线振动监测系统的显示界面。

图5 上位机显示界面
整个系统完成组装,并经反复调试后,在标准振动台上,采用有线振动监测系统,对所研制的无线振动监测系统的有关功能及技术指标进行了多次测试。其中,所选用的ICP传感器,量程为±8 g,灵敏度为500 mV/g。同时,与本次研制的无线振动监测系统对同一信号进行9次测试,数据列于表2。
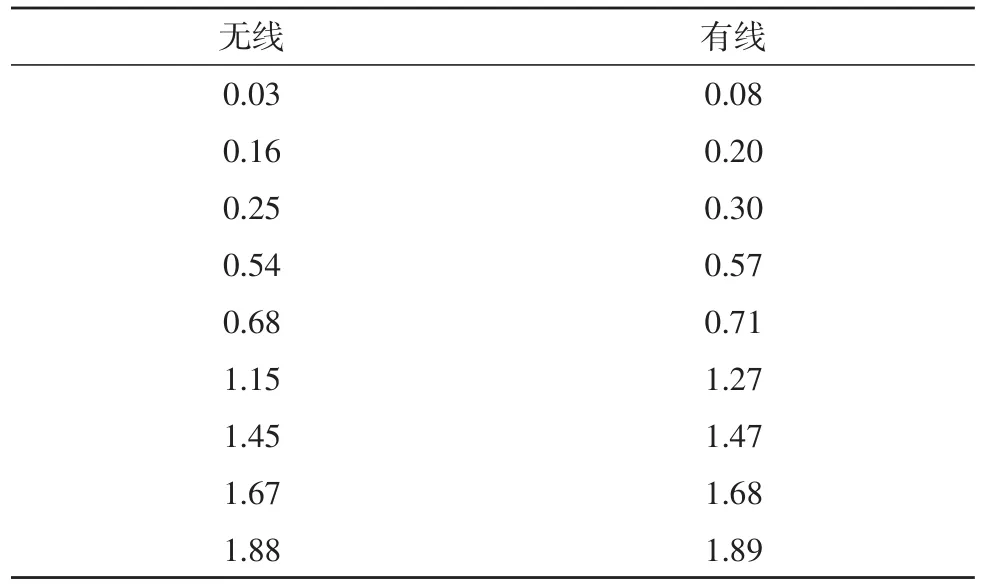
表2 加速度数值对比分析表单位/(m/s2)
用有线和无线振动监测系统测出的加速度值分别为a(k)和b(k),可以根据平均误差公式(16)和均方误差公式(17)求出其平均误差RA和均方误差HM。

根据表格数据,绘制出无线和有线振动监测系统测量的加速度值的对比分析图,将数据代入到公式(16)和(17)求出 RA=0.028 89,HM=0.000 84,如图6为加速度值对比分析图。

图6 为加速度值对比分析图
1)从加速度对比分析图,RA和HM的数值中我们可以得出无线振动监测系统可以准确的测出机械振动的加速度数值。
2)我们从对比分析图中也可以得出,加速度越大时,两个系统测出的数值基本一致。
4 结论
文中针对振动信号的监测,结合LORA技术,设计出一种低功耗无线振动监测系统。采用相位差法对振动信号的幅值、频率、相位进行修正,通过仿真研究,相位差法的校正精度较高,负频率成分的干涉影响很小,频率为5.2 Hz的信号校正精度较高。为验证该系统的准确性,对该系统进行了实验验证和误差分析,实验结果表明,本系统灵活方便,数据可靠,且精度较高,适用于振动监测。