民用飞机飞行品质评估准则探究
2018-12-12吴胜亮
吴胜亮
【摘 要】基于民用飞机的任务特性,按照机动性和准确性将民机飞行阶段重新划分为2个阶段;在此基础上,从定性和定量的角度将现有的飞行品质评估准则归类为主观和客观评估准则,分别在民机飞行品质主观评价方面和纵向飞行品质、横航向飞行品质、起飞着陆特性与飞行员诱发振荡方面对飞机飞行品质典型主观和客观评估准则进行分析,探讨现有的飞行品质评估准则应用于民机飞行品质评估的适用性和可能性,对民机飞行品质评估具有一定的参考价值。
【关键词】飞行品质;民用飞机;主观评估准则;客观评估准则
中图分类号: V212.1;V279 文献标识码: A 文章编号: 2095-2457(2018)23-0017-007
DOI:10.19694/j.cnki.issn2095-2457.2018.23.005
【Abstract】Based on the task characteristics of civil aircraft,flight phases of civil aircraft divided into two phases in accordance with the control requirements of maneuverability and precision.Subjective and objective assessment criterion was established qualitatively and quantitatively on existing flying quality assessment criterion;At the aspect of flying quality subjective evaluation and longitudinal flying quality,lateral-directional flying quality,characteristic of takeoff and landing,and pilot induced oscillation,this paper analyses subjective and objective assessment criterion of civil aircraft.Applicability and possibility of existing flying quality assessment criterion to civil aircraft flying quality assessment was discussed.This research work has certain reference value for the evaluation of civil aircraft flying qualities.
【Key words】Flying quality;Civil aircraft;Subjective assessment criterion;Objective assessment criterion
0 引言
飛行品质是衡量飞机完成特定飞行任务的精确度及驾驶员工作负荷的尺度,飞行品质的优劣决定了飞行员能否安全、顺利、精确地驾驶飞机完成各项飞行任务,所以飞行品质是飞机的设计师与操控人员最为关心的问题,在飞机的设计、研发、测试和使用中始终扮演着重要角色。
从国内外研究情况来看,飞机的飞行品质一般从两个方面去评价,一方面,可通过拟配得到简化的低阶等效系统,利用传统的判据和多年积累的飞行数据,并在此基础上寻找新判据。另一方面,从高阶系统本身的时域和频率响应特性出发,寻找新判据。虽然国内外学者对民机飞行品质的特性进行了有益探索,给出了相关研究建议,但还没有对民机飞行品质评估准则进行系统的探讨。本文基于民用飞机的任务特性,按照机动性和准确性对民机飞行阶段进行重新划分,对现有的飞行品质评估准则归类为主观和客观评估准则,并进行详细的汇总阐述,分析了飞行品质评估准则应用于民机飞行品质评估的适用性和可能性,即哪些准则可以直接应用到民机上,哪些应当做适当的修改,以及依据什么原则进行修改,对民机飞行品质评估具有一定的参考价值。
1 民机飞行阶段
由飞行品质的概念可知,飞行品质与飞行阶段是紧密相关的。对于飞行员来说,不同的飞行阶段有着不同的飞行任务以及不同的工作负担,因此,在评价民机飞行品质时必须区分这些因素的影响,给出合理的评价方法及准则。
对于民机来说,其飞行阶段主要包括起飞、复飞、着陆进场、巡航、爬升和下降。前三个阶段要求准确控制飞行轨迹,飞行员操纵动作较为频繁;而后三个阶段无需精确或者只要求尽可能精确控制飞行轨迹,飞行员操纵负担较轻。军机飞行阶段分为A、B、C三段,其B种飞行阶段的定义与民机的起飞、复飞、着陆进场飞行阶段接近,其C种飞行阶段的定义与民机的巡航、爬升和下降飞行阶段接近[3] 。因此,参照军机飞行阶段的分类,将民机飞行阶段分为B、C两段,如表1所示。
2 民机飞行品质评估准则
2.1 主观评估准则
在评价飞行品质时,只有飞行员的评估才能确切反映出人-机系统性能与执行任务的工作负担之间的相互关系。为使飞行员的评估有一个共同的衡量尺度和描述术语,需要确定一个定性的评价尺度。现在比较通用的评价尺度是美国Cooper和Harper共同制定的C-H评价尺度。这个尺度从飞机的操纵性和飞行员完成飞行任务的工作负担两个方面,用文字描述给出了10个不同的评价尺度[4]。如下图所示。
进行飞行品质计算时,必须给出不依赖于飞行员直接评分且与飞行环境无关的客观评分标准。美国军用规范中规定了3个等级,在民机飞行品质评估中可以借鉴并使用[1]。三个等级分别具有的飞行品质如下所示:
等级1:飞行品质明显地适合完成任务的飞行阶段;
等级2:飞行品质适合于完成任务的飞行阶段,但飞行员的工作负担有所增加,或完成任务得效果有所降低,或两者兼而有之;
等级3:飞行品质满足安全操纵飞行的要求,但飞行员工作负担过重,或完成任务效果不好,或两者兼而有之。
上述3个等级与C-H评价尺度的关系如图1所示。
CCAR-25中有关民机飞行品质要求需要经过试飞员、试飞工程师和适航部门综合评定,只有满意和不满意之分。虽然C-H评价尺度和飞行品质等级概念是针对军机提出来的,在民机飞行品质分析和预测时,仍然可以借鉴使用该评价体系。在飞行控制律设计阶段使用三个等级评价飞行品质,其优点在于有助飞行控制系统设计者了解修改飞行控制律之后,飞行品质的改善趋势和改善程度,并容易在多个飞行品质中取得平衡。
2.2 客观评估准则
下面分别从纵向飞行品质、横航向飞行品质、起飞着陆特性和飞行员诱发振荡对飞机飞行品质典型客观评估准则的分析,探讨将其用于民机飞行品质评估的适用性,对于设计者来说,掌握更多的评估工具有利于设计的可靠性与完备性。
2.2.1 纵向飞行品质分析
(1)等效系统方法
常规飞机传递函数包含短周期和长周期两个模态。由飞机纵向小扰动线性方程,可以得到俯仰角速率和瞬时转动中心处法向过载的传递函数为:
在纵向扰动运动的初始阶段,短周期运动占主导地位;长周期运动响应缓慢,在其运动期间短周期运动已基本结束。在研究纵向扰动运动时,可将飞机模态分离近似成短周期传递函数和长周期传递函数,分别进行研究,并且可以直接与相关的规范进行比较,进行飞行品质评定。
现代民机大都采用电传飞行控制系统,系统中包括有反馈、前馈及中频成形滤波器和其它高频部件,其阶次高达50~70阶,不再具备经典飞机传递函数形式,美军标MIL-F-8785C提出使用等效系统方法[5]将高阶系统等效成一个具有经典飞机传递函数形式的低阶系统,从而可以按常规飞机的方法评价飞行品质。
所谓一个高阶增稳系统的低阶等效系统是指,两个系统在相同的初始条件下,受到同样的外界激励作用,在一定的频域范围内或者时间区段内,相应的输出量的差值在某个指标意义下达到最小。根据多年的使用经验及军用规范,实际操作中一般使用一种频域的拟合方法来求取等效系统参数。
已知高階增稳飞机的频域响应为GHOS(j?棕),给定的低阶经典飞机的频域响应为GLOES(j?棕),采用高、低阶系统频率响应的幅值和相角偏差的平方和作为失配参数优化指标,寻求GLOES(j?棕)中的有关参数。失配参数优化指标如下:
式中,M为失配参数;GHOS(j?棕i)和GLOES(j?棕i)为相应频率点上高阶及低阶系统的频响幅值,以分贝(dB)为单位;为相应频率点上的相角值,以度(°)为单位;频率点通常在0.1~10rad/s范围内均匀取20个点;参数K为加权系数,常取K=0.016~0.02。
等效低阶模型应当具备典型飞机传递函数形式,如飞机纵向短周期,俯仰角速率和瞬时转动中心处法向过载的低阶等效传递函数为:
基于纵向低阶等效系统,可以获得等效的纵向短周期阻尼及频率、CAP参数、延迟时间等参数,从而可以评价飞机的纵向动稳定性和纵向动操纵性。
基于横航向低阶等效系统,可得到等效的“荷兰滚”阻尼及频率、滚转模态时间常数、延迟时间等参数,从而可以评价飞机横航向动稳定性和动操纵性。
a)时间延迟要求
时间延迟是飞行员杆力输入到飞机开始响应之间的停滞时间,其产生的原因是很复杂的。具有小的时延是好的飞行品质的关键,过大的时延会影响飞行员驾驶飞机的感觉,甚至导致PIO现象的出现。
在适航性条例中,没有明确给出时间延迟的要求,文献[6]根据地面模拟试验结果,给出了适用于民机电传飞行控制系统的时间延迟要求,如表2所示。
表2 民机时间延迟要求
时间延迟可等效理解为传递函数的相位滞后。文献[7]中提出干线运输机电传飞行控制系统相位滞后的要求,希望频率1Hz的相位滞后,对于舵机输出环节位移幅度1.0mm不大于25°,0.1mm不大于40°;频率5~15Hz的幅值特性上升,对应舵机输出环节位移幅度1.0mm不大于1.5dB,0.1mm不大于3.5dB。
b)短周期阻尼比要求
经等效拟配后的品质应满足下表中的短周期阻尼比要求。
采用开环带宽作为评价准则,主要是从人-机闭环系统的稳定性考虑的。实际上,开环带宽是保证人-机闭合回路稳定性的重要参数。该准则的涵义是:即使飞行员增大控制增益2倍,或增大附加延时,也不会引起系统不稳定。
(3)尼尔-史密斯准则(闭环准则)
尼尔-史密斯准则[11]又称为闭环准则,是为高增稳飞机执行俯仰姿态精确跟踪任务而开发的,后来被推广到着陆任务。该准则针对俯仰姿态回路开发,是面向包括驾驶员反应与操纵在内的人-机闭环准则,评估人-机闭环系统的动态特性,通过频域指标进行等级评估。
该准则的基本方法是:把驾驶员-飞机俯仰姿态控制回路模型化为前向通道中有一个技术员模型的单位反馈系统,如下图所示。其中Yc表示飞机和飞行控制系统的传递函数,Yp表示驾驶模型员的行为动态,可表示为:
a)规定与任务相适应的带宽要求;
b)调整飞行员参数(Kp,Tp1和Tp2),以获得最佳的闭合系统性能;
c)测量所需的闭合补偿(工作负荷)及最大的闭合谐振;
d)把测量值与参数边界相比较,评价飞行品质。
该准则可用于民机着陆俯仰飞行品质的鉴别工具。
(4)俯仰角速率准则(Chalk准则)
俯仰角速率准则[1]是根据飞行员俯仰阶跃操纵输入时俯仰角速率响应形状进行飞机纵向飞行品质评定的准则。具体认为,在保证飞机飞行速度为常值的条件下,由飞机俯仰角速率响应特性应具有按下述方式定义的特性,满足表 4所示要求。
该准则实际上限制了飞机俯仰角速率对指令的响应特性,因此不必识别系统的等效系统参数,故可以用于带有电传飞行控制系统的民机,但该方法不能用于俯仰姿态指令系统。由于该准则是时域测试,故可直接用于高阶响应和非线性响应,阶跃输入信号幅值大小可以任意给定。
(5)时域-频域响应准则
时域-频域响应准则[1]是英国人J.C.Gibson为优化飞机电传飞行控制系统纵向控制律设计而提出的。
法向加速度,飞机航迹角和姿态角的关系如图6所示。Gibson根据飞机俯仰响应特性,给出了具体的各项评价要求。
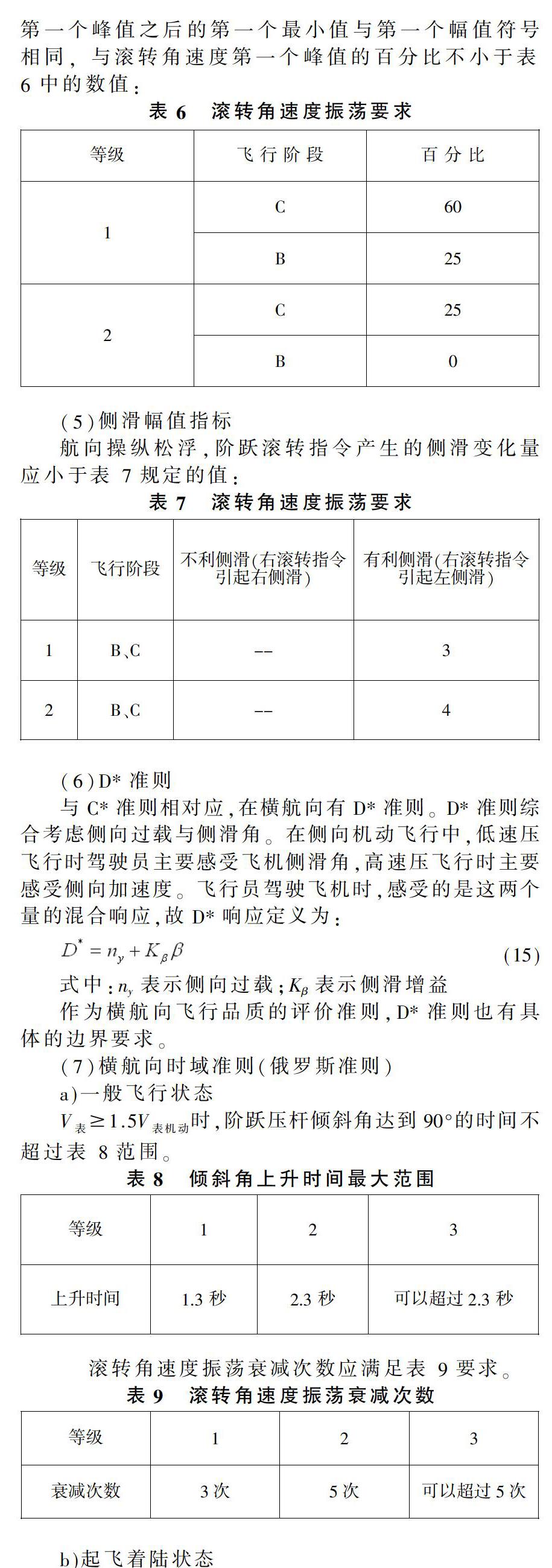
(6)C*准则
C*准则是一种时域评价准则,综合考虑飞机的法向过载和俯仰角速率[12]。在实际操作中,飞行员感受到的是这两个量的混合响应,并以此来评价飞行品质。该混合响应定义为C*响应:
式中,nz表示法向过载;q表示俯仰角速率;VCO为交叉速度,一般取122m/s。
由于只考虑飞机的响应,而不限用于飞机的低阶特性分析,因此适合于各种高阶飞行控制系统。C*准则包括时域响应包线准则和频域响应包线准则,这些包线反映了频率和阻尼所描述的飞机特性,也考虑了非线性、高阶和操纵系统特性在内,所以便于应用。C*包线如下图所示:
C*准则是评价飞机纵向飞行品质的一种准则,也可以作为纵向控制律的设计准则。美国的波音747、777飞机,空客A320飞机的纵向控制律设计都采用了C*准则[13]。
波音公司在民机电传飞控系统设计中对C*准则做了一些修正, 同时还给出了C*的频率响应包线[2]。图8为B747飞机在飞控系统设计中给出的C*包线及其设计状态的检查情况。从图9中可以看到:用C*反馈(俯仰角速度和法向过载综合反馈)控制律设计明显地改善了飞机的动态反应特性。
2.2.2 横航向飞行品质分析
(1)横航向等效系统方法
由飞机横航向小扰动线性方程,可以得到滚转角速率和侧滑角传递函数如下所示。对于高增稳民机横航向的传递函数,同样可采用低阶等效系统方法得到该方程。
可以使用以下几项评价指标评价飞机横航向短周期特性:
(2)对横-航向振荡要求
表现为阻尼比、振荡频率或它们的乘积等指标,如下表。
(3)ICAO推荐的横-航向短周期振荡边界判据
定义表示倾斜角,Vy表示空速横侧分量(当量空速),Ve=Vy/。该判据如图10所示。
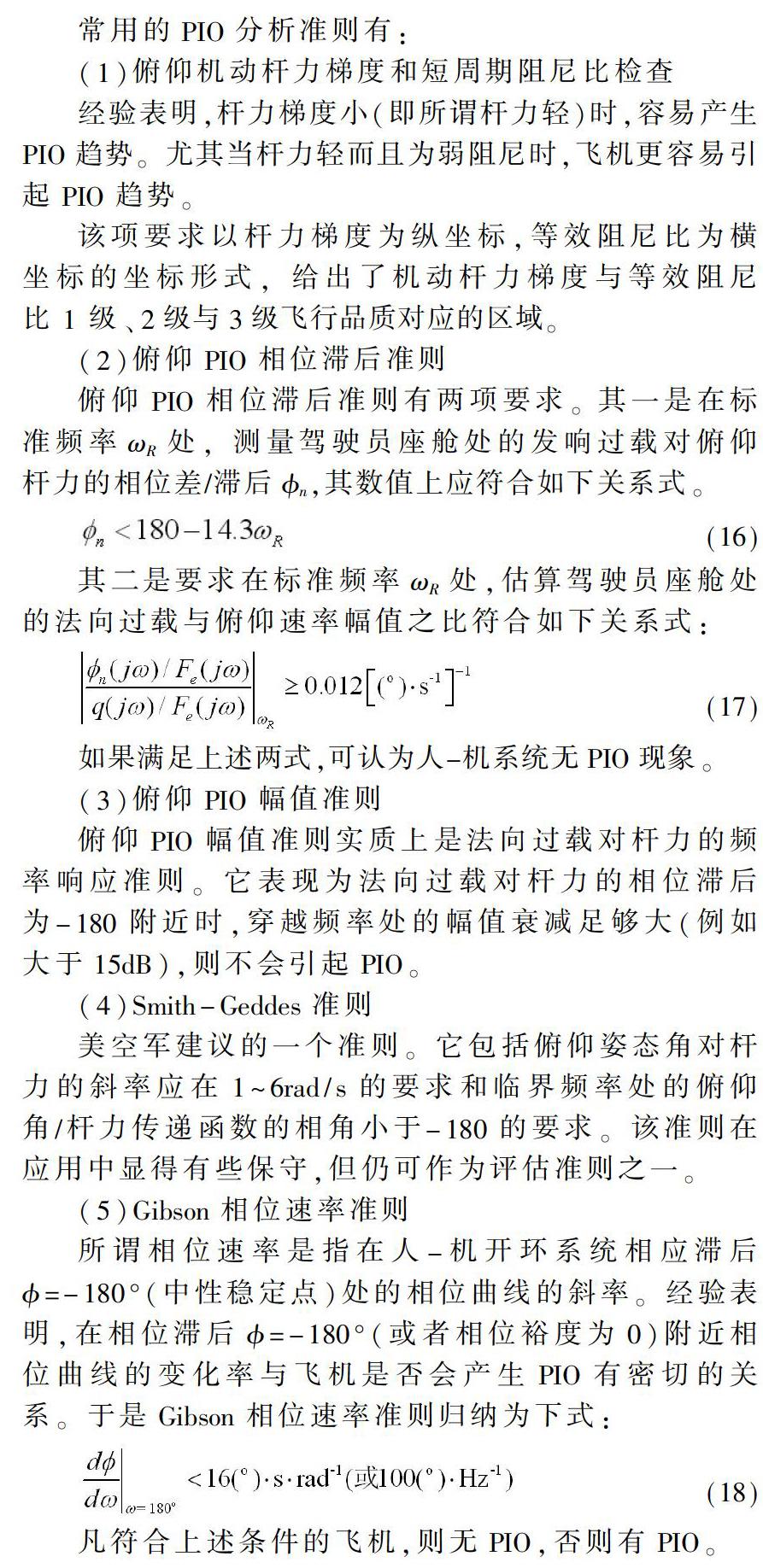
(4)滚转角速度振荡指标
航向操纵松浮,阶跃滚转指令产生的滚转角速度第一个峰值之后的第一个最小值与第一个幅值符号相同,与滚转角速度第一个峰值的百分比不小于表 6中的数值:
表6 滚转角速度振荡要求
(5)侧滑幅值指标
航向操纵松浮,阶跃滚转指令产生的侧滑变化量应小于表 7规定的值:
(6)D*准则
与C*准则相对应,在横航向有D*准则。D*准则综合考虑侧向过载与侧滑角。在侧向机动飞行中,低速压飞行时驾驶员主要感受飞机侧滑角,高速压飞行时主要感受侧向加速度。飞行员驾驶飞机时,感受的是这两个量的混合响应,故D*响应定义为:
2.2.3 起飞着陆特性分析
飞机起飞着陆阶段是一个严重受外界环境制约及人为因素影响的阶段,事故发生概率很高。为保证新机安全起飞着陆,单独研究这一阶段的飞行品质的评价准则是很有必要的。
通常,起飞阶段可划分为[1]:①由静止开始的地面三轮加速滑跑;②抬前轮形成起飞迎角的两轮滑跑;③到达离地速度后爬升,直至安全高度。
着陆阶段分为:①在高度350m处对准跑道下滑;②高度(10—20)m时拉平减速;③高度1m时飘落(含平飞减速,主轮接地);④两轮减速滑跑;⑤三轮滑跑,打开阻力伞,进一步减速直至停止不动。
飞机起飞着陆阶段具有驾驶员频繁操作,状态变化复杂的特点,为了保证飞机的安全起飞着陆,对起飞着陆阶段的飞行品质都有严格的要求。
在军用规范中,针对飞行阶段C规定了很多飞行品质评价准则。比如带宽准则,该准则是由规定的开环系统带宽及时间延迟的相互关系定义的,对C种飛行阶段有对应的要求。又如俯仰角速率准则,通过俯仰角速率响应形状的要求进行飞行品质的评定。但这些准则没有严格区分在每个飞行阶段中各个单独的控制区段,例如在端点飞行阶段(C阶段),应用这些规范准则时,评价指标并没有什么区别,但对C阶段的着陆过程来说,由于着陆又细分为下滑、拉平、接地阶段,只用单一不变的指标来评价多个子阶段就可能不会得到着陆阶段准确的飞行品质[1]。这些准则或是不能辨识不同飞行阶段的要求,没有将着陆阶段细分为下滑、拉平和接地子阶段,或是没有考虑人的特性,所以将这些准则应用到起飞着陆阶段难以获得准确的飞行品质评价。
目前有多种评价飞机起飞着陆阶段飞行品质的评价准则,大致可分为时域准则和频域准则两大类。
时域准则有:航迹角峰值超调评价准则,Onstott准则,时域低阶等效系统方法[14]。时域准则直观,使用方便,适用于非线性的复杂系统,可避免不恰当的近似,其预测的飞机品质等级与实际驾驶员评价吻合较好。
频率准则有:回路分离参数法,波音公司的人-机闭环系统品质要求,闭环(尼尔-史密斯)准则,修正的尼尔-史密斯准则,高度变化率准则,具有姿态内回路的高度准则,GM/PM准则,MCAIR等效系统方法,R. H.Smith准则,进场着陆最优姿态响应准则[14]。
实践表明,航迹角峰值超调评价准则、回路分离参数法、波音公司的人-机闭环系统品质要求与飞行员评分有着良好的关系,可以用于民机起飞着陆特性分析。
3.2.4 飞行员诱发振荡预测准则
电传飞行控制系统是一种高性能、高增益系统,因而由于种种原因容易产生飞行员诱发振荡(PIO)。飞行员诱发振荡往往来得很突然,在事故之前,一切仿佛都很顺利,但猝不及防就产生了事故,甚至是灾难性的事故[15]。
在适航性条例中没有明确的条文提到PIO,但PIO是一种令飞行员非常讨厌的操纵现象,与适航性条例中类似“良好的操纵感觉”的主观性要求是相悖的,因此在民机控制律设计时应分析飞机的PIO趋势。
常用的PIO分析准则有:
(1)俯仰机动杆力梯度和短周期阻尼比检查
经验表明,杆力梯度小(即所谓杆力轻)时,容易产生PIO趋势。尤其当杆力轻而且为弱阻尼时,飞机更容易引起PIO趋势。
该项要求以杆力梯度为纵坐标,等效阻尼比为横坐标的坐标形式,给出了机动杆力梯度与等效阻尼比1级、2级与3级飞行品质对应的区域。
(2)俯仰PIO相位滞后准则
俯仰PIO相位滞后准则有两项要求。其一是在标准频率?棕R处,测量驾驶员座舱处的发响过载对俯仰杆力的相位差/滞后?准n,其数值上应符合如下关系式。
其二是要求在标准频率?棕R处,估算驾驶员座舱处的法向过载与俯仰速率幅值之比符合如下关系式:
(3)俯仰PIO幅值准则
俯仰PIO幅值准则实质上是法向过载对杆力的频率响应准则。它表现为法向过载对杆力的相位滞后为-180附近时,穿越频率处的幅值衰减足够大(例如大于15dB),则不会引起PIO。
(4)Smith-Geddes准则
美空军建议的一个准则。它包括俯仰姿态角对杆力的斜率应在1~6rad/s的要求和临界频率处的俯仰角/杆力传递函数的相角小于-180的要求。该准则在应用中显得有些保守,但仍可作为评估准则之一。
(5)Gibson相位速率准则
所谓相位速率是指在人-机开环系统相应滞后?准=-180°(中性稳定点)处的相位曲线的斜率。经验表明,在相位滞后?准=-180°(或者相位裕度为0)附近相位曲线的变化率与飞机是否会产生PIO有密切的关系。于是Gibson相位速率准则归纳为下式:
3 总结
民机飞行品质评估准则的形成是一项长期的工作,需要大量的实际工作经验和研究。本文从飞行品质评估准则应用于民机飞行品质评估的适用性和可能性角度出发,在民机飞行品质分析和预测方面探索方面,探索民机飞行品质主观评估准则的研究思路;在纵向飞行品质、横航向飞行品质、起飞着陆特性和飞行员诱发振荡方面,探索民机飞行品质客观评估准则的研究思路,对民机飞行品质评估具有一定的参考价值。
【参考文献】
[1]高金源.飞机飞行品质[M].北京:国防工业出版社,2003.
[2]Anon.Military specification.Flying Qualities of Piloted Airplanes.MIL-F-8785C[S],1980.
[3]文传源.现代飞行控制[M].北京:北京航空航天大学出版社,2004.97.
[4]Cooper RJ,Harper RJ Jr.The use of pilot rating scale in the evaluation of aircraft handling qualities[J].NASA TND-5313,1969.
[5]John Hodgkinson.A history of low order equivalent systems for aircraft handling qualities analysis and design[J].AIAA 2003-5466,2003.
[6]Possitto K F.Hodgkinson J.Longitudinal and lateral directional flying qualities investigation of high-order characteristics for advanced-technology transports[J].AIAA-93-3815-CP,1993.
[7]孙荣科.干线飞机空气动力学和飞行力学[M].北京:航空工业出版社.1996.
[8]Bischoff R E,The Control Anticipation Parameter for Augmented Aircraft[J].NADC-81186-60,1981.
[9]Ken F.Rossitto,John Hodgkinson,Todd M.William,et al. Initial results of an in-flight investigation of longitudinal flying qualities for augmented,large transports in approach and landing [J].AIAA-93-3816-CP,1993.
[10]Hoh R H,et al.Bandwidth:A criterion for highly augmented airplanes[J].AGHRD-CP-333,1982.
[11]Brian A.Kish,Brian L.Jones.A comparison of the Neal-Smith and omega(sp)T(theta2),zeta(sp),tau(theta)flying qualities criteria[J].AIAA-95-3455-CP,1995.
[12]Field Edmund J.The application of a C* flight control law to large civil transport aircraft[R].Collage of Aeronautics Report, No 9303,1993.
[13]劉振钦.民机电传飞行控制系统飞行品质要求探讨[J].飞行力学,1998.16(2):7~13.
[14]张学敏.飞机起飞着陆飞行品质评价软件开发[D].北京:北京航空航天大学,2006.
[15]张曙光,方振平.大迎角飞行品质研究进展[J].飞行力学,1998.16(1):1~6.
