VSC-HVDC直接电流控制的参数整定方法
2018-12-12汪俊余沈浩东马新平许真
汪俊余, 沈浩东, 马新平, 许真
(南瑞集团国际业务公司,江苏 南京 211106)
0 引 言
柔性直流输电(VSC-HVDC)技术以电压源换流器(VSC)、可关断电力电子器件、脉宽调制(PWM)技术为核心,是一种更加灵活、经济和环保的输电方式。与常规直流输电技术相比,VSC-HVDC技术具备可控性好、灵活性高、可向无源网络供电、不增加交流电网的短路容量等特点,可有效解决清洁能源的可靠并网、孤岛供电、城市电网的扩容和改造等问题,应用前景广阔[1-3]。
控制系统对于VSC-HVDC的运行性能起着至关重要的作用。VSC-HVDC换流器控制策略主要分为间接电流控制和直接电流控制两大类。间接电流控制通过控制换流器交流侧电压的幅值和相位来控制交流电流,控制结构简单、易于实现,但存在动态响应慢、难以实现限流控制等缺点。相比之下,直接电流控制采用电压外环电流内环的双环控制策略,具有电流响应速度快、容易实现限流控制、有功与无功易于实现解耦控制等优点,较适用于高压大功率场合。
在直接电流控制方式下,每个电流内环包含两个PI环节,分别控制相应的有功、无功分量。采用定直流电压控制的电压外环也包含一个PI环节。因此,PI调节器的参数整定可以看作是控制系统设计的核心内容。工程上大多采用试凑法或经验法来选取PI控制器参数[4],这需要工程人员具有较高的技巧和经验。在理论研究方面,文献[5]利用自适应粒子群优化(APSO)算法进行PI参数寻优。文献[6]提出一种模最优与对称最优相组合的PI参数整定方法。采用模量最优的原则整定电流内环控制器参数,采用对称最优原则整定外环电压控制器参数。文献[7]则将模量最优与对称最优原则用在对模块化多电平换流器(MMC)型VSC-HVDC双闭环控制系统控制器主要参数的设计中。理论计算结果往往不能满足实际动态响应要求,在工程上需要做大范围调整。
针对上述问题,本文首先分析了VSC-HVDC系统整流器的数学模型和直流电流控制的拓扑结构,提出一种将理论计算结果和工程试验手段相结合的参数整定方法。电流内环仍采用常见的典型I型或II型控制方案,电压外环采用基于稳定裕度的参数方法,使得双环控制系统具有良好的响应性能,且便于在工程中采用。最后在PSCAD/EMTDC中仿真验证该方法的有效性。
1 数学模型
三相VSC-HVDC系统的整流器结构如图1所示[8-9]。
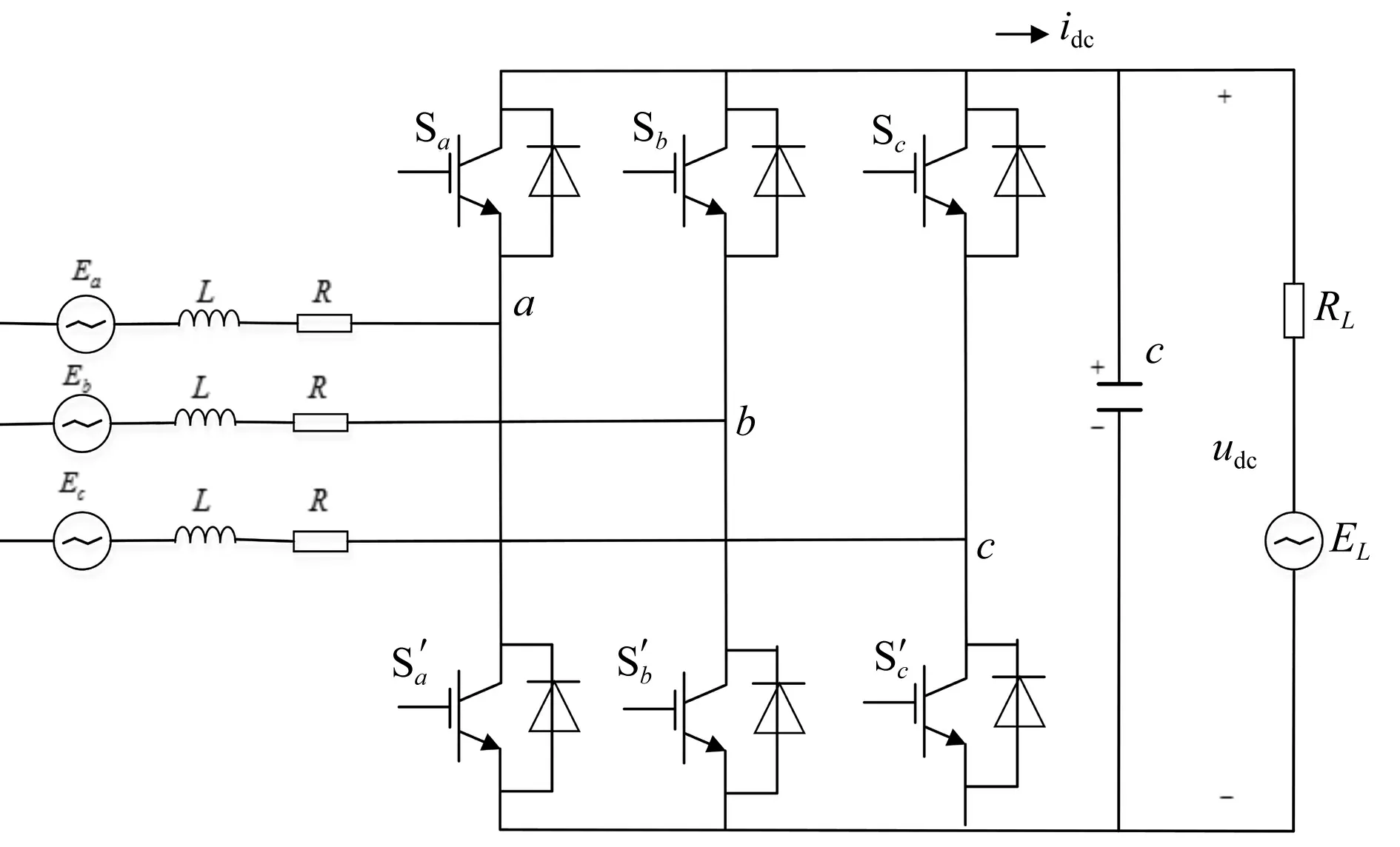
图1 三相VSC-HVDC系统整流器结构
在dq坐标系下,整流器模型可以表示为:
(1)
Cpudc=idc-iL
(2)
式中:ed、eq是电网电动势矢量Edq的d、q轴分量;vd、vq是VSC交流侧电压矢量Vdq的d、q轴分量;id、iq是三相VSC交流侧电流矢量Idq的d、q轴分量;udc是正、负极直流母线间的电压;idc是直流侧电流;iL是负载电流;L是网侧滤波电感;R是开关损耗等效电阻;C是直流侧电容;RL是负载电阻;ω是角频率;p是微分算子。
2 拓扑结构
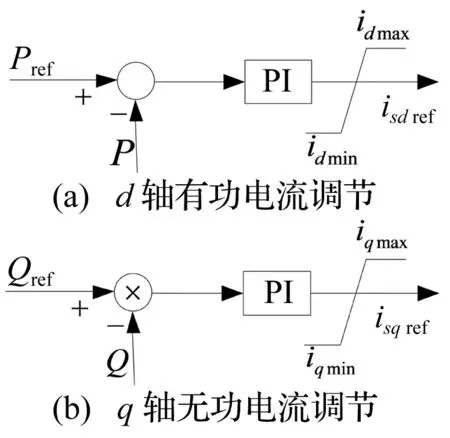
图2 外环有功和无功控制器
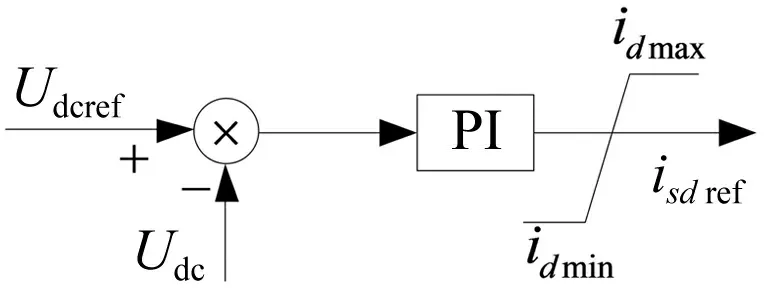
图3 外环直流电压控制器
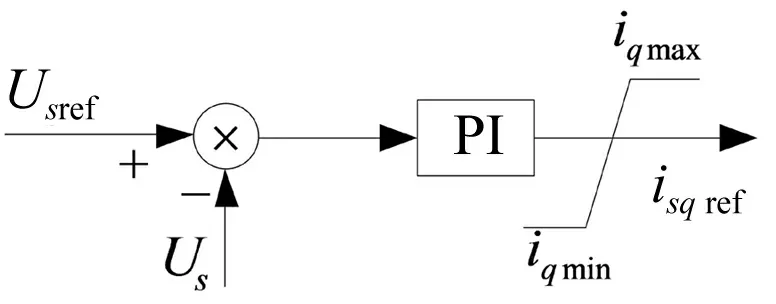
图4 外环交流电压控制器
在三相VSC-HVDC控制系统设计中,直接电流控制一般采用双环控制,即电压外环和电流内环。电压外环主要作用是与系统级控制相互配合,实现相应的定有功功率、定无功功率、定直流电压和定交流电压[10]。控制结构分别如图2~图4所示。
图中:Pref和P分别表示有功参考值和量测值;Qref和Q分别是无功参考值和量测值;isdref和isqref分别是d轴和q轴电流参考值;idmin和idmax表示d轴限流环节;iqmin和iqmax表示q轴限流环节;Udcref和Udc分别表示直流电压参考值和测量值;Usref和Us分别表示外环交流电压参考值和量测值。
3 控制系统设计
为了保持VSC-HVDC系统的有功功率平衡,电压外环必须有一端换流器采用定直流电压控制[11-12]。
在常见的双环控制策略中,电流内环常采用典型I型、典型II型或二阶系统设计,电压外环常采用一般低阶模型设计。
3.1 电流内环设计
1)典型I型系统设计
典型I型系统的开环传递函数一般形式为K/s(Ts+1),不考虑电网电动势q轴分量eq扰动,当取阻尼系数ε=0.707时,电流内环的开环传递函数为:
(3)
式中:Kp、Ki为电流内环PI调节器参数;Ts为电流内环等效时间常数;τi为PI调节器零点,当按典型I型系统设计时,可取PI调节器零点抵消电流控制对象传递函数的极点,即:τi=L/R;s是拉普拉斯算子。
由于Ts很小,内环传递函数可化简为惯性环节Woi(s)=1/(1+3Tss)。因此,电流内环具有较快的动态响应。
2)典型II型系统设计
典型II型系统的开环函数一般形式为K(τs+1)/s2(Ts+1),忽略R后,电流环开环传递函数为:
(4)
3.2 电压外环设计
将电流内环等效为惯性环节,当电压外环采用低频模型时,其开环传递函数为:
(5)
式中:Kv、Tv为电压外环PI调节器参数;Tev为电压采样小惯性时间常数与电流内环等效小时间常数之和。
由式(5)可以看出,在该设计下,电压环是一个典型II型系统。
3.3 基于稳定裕度的参数整定

图5 系统开环传递函数伯德图
根据式(5)绘制系统开环传递函数伯德图,如图5所示。
当IGBT开关频率足够高时,Tev数值很小,系统的相位裕度主要取决于ωcTv,且可近似认为截止频率ωc=1/Tv。为兼顾电流内环的快速响应和电压外环的稳定性,取ωc为电网频率的1/10,此时,可计算得:
ωc=2πf×0.1=31.4
(6)
此时,系统相位裕度约为45,满足控制稳定性要求。由于ωc落在-20 dB/dec的中频段,根据斜率计算得到:
(7)
据此,便得到了电压外环PI调节器整定参数。
若电压外环采用定有功、定无功等控制策略,其调节规律与定直流电压方式相似,甚至可以直接根据瞬时功率计算出参考电流,反而可以简化控制系统的设计,本文不作详细分析。
4 仿真分析
在PSCAD/EMTDC中搭建VSC-HVDC双端有源仿真系统。其中,整流侧VSC1采取定直流电压和定无功控制策略,逆变侧VSC2采取定有功和定无功控制策略。
4.1 仿真参数
系统仿真参数设置如下:L=5 mH,R=0.01 Ω,C=6 600 μF×2,基础频率f=50 Hz,换流器开关频率fs=1 350 Hz,两端交流系统额定电压Us1=Us2=380 V,额定容量Sn=100 MVA。
4.2 仿真结果
当电流内环采用典型I型、II型系统,电压外环采用低频模型设计时,PI参数的理论计算值如表1所示。

表1 典型控制模式下PI参数 (中频宽h=5)
根据表1的PI参数整定结果,电流内环可以满足系统稳态运行要求,但加入电压外环后系统变得不稳定,需要对电压外环PI参数进行大范围修正。
根据上文所提的基于稳定裕度的整定方法,PI参数的理论计算结果如表2所示。

表2 基于稳定裕度的PI参数
电流内环按典型I型,电压外环基于稳定裕度设计,逆变器有功Pref按斜坡变化实现潮流反转时,系统逆变侧和整流侧的输出波形分别如图6和图7所示。
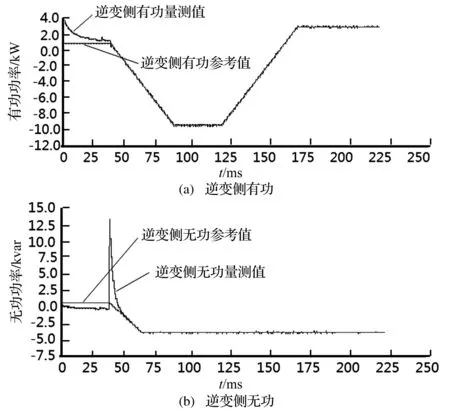
图6 逆变侧输出波形
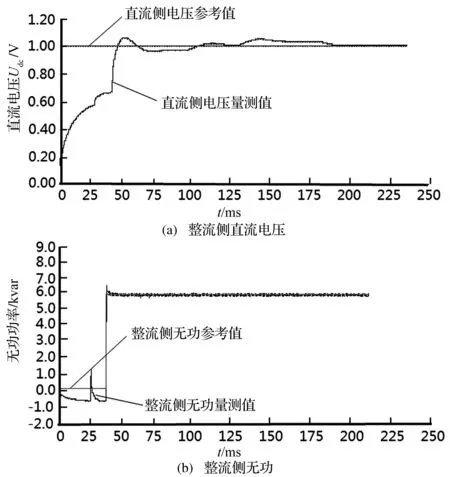
图7 整流侧输出波形
5 结束语
VSC-HVDC系统有多个控制回路,调节参数的设定对闭环系统稳定性有重要影响。本文针对VSC-HVDC系统的直接电流控制提出了参数整定方法。电流内环仍然采用典型I型或II型系统,使得内环具有快速响应和鲁棒性。外环采用基于稳定裕度的参数整定方法,修正量小。仿真结果表明,基于稳定裕度的设计方法整定出来的PI参数更接近于实际值,且达到较好的稳定性和抗干扰性能。
