视觉特效中摄影机运动轨迹反求技术的应用
2018-12-11赵立立
赵立立
(作者单位:中国传媒大学南广学院)
摄影机运动拍摄与被摄体的运动是电影创作的灵魂,在电影视觉特效制作中,将事先制作的数字模型或虚拟角色放置到实拍的场景中是很常见的表现手法之一。早期的电影特效制作中添加三维数字模型或虚拟角色,大多采用固定镜头来避免运动匹配的技术难题,这个问题也是当时制约电影特效创作的一个瓶颈。而摄影机运动轨迹反向技术的诞生,打破了这个瓶颈,使电影视觉特效创作空间达到了一个新高度。
1 摄影机运动轨迹反求技术的产生原因
在摄影机运动轨迹反求技术诞生之前,对于运动镜头添加三维数字模型大多采用摄影机运动控制系统(Motion Control)进行拍摄,通过这套系统记录并导出摄影机的运动数据到计算机,然后进行三维数字模型与实拍的合成[1]。然而,摄影机运动控制系统依然有其弊端,庞大的设备以及复杂的结构,限制了它的使用范围。例如,在狭小的空间里,这套庞大的运动控制系统就无法进行拍摄。而摄影机运动轨迹反求技术的出现,很好地解决了这一难题,使用任何规格的摄影机进行前期的拍摄,都可以给实拍的影像加入虚拟的三维动画或视觉特效,这不仅提高了电影制作效率,也极大丰富了电影创作手段。
2 摄影机运动轨迹反求的原理
摄影机运动轨迹反求也叫镜头运动匹配或镜头跟踪,是指实拍运动影像画面与虚拟视觉特效运动相匹配的过程[2]。
摄影机运动轨迹反求的原理是计算机根据实拍的二维信息的运动画面进行像素检测分析,通过二维变化的信息推算出其三维空间中的坐标定位,然后构建原实拍素材的三维空间信息,再反向推算出摄影机实拍时的运动轨迹,这个运动轨迹包括镜头角度和位置的变化。在这个推算出的虚拟三维空间中,可以添加需要的三维动画与视觉特效,使添加的虚拟元素与特效输出后可以完美与实拍素材进行匹配合成。例如,电影《变形金刚》中的一个特效镜头:大黄蜂以跑车形态从远处的路面疾驰而来,当临近镜头时腾空跃起变形为汽车人落在地面。这个镜头前期是利用稳定器拍摄的运动镜头,并未使用摄影机运动控制系统(Motion Control)来拍摄,这就需要首先对拍摄素材进行摄影机运动轨迹反求,利用计算出的跟踪数据添加虚拟的数字三维动画,最终实现的画面效果是大黄蜂能够稳稳贴在地面行驶,并且腾空一跃后又能稳稳站在地面上,带给观众近乎真实的视觉震撼。
3 摄影机运动轨迹反求应用的主要环节
摄影机运动轨迹反求技术在视觉特效制作中主要有5个环节。在特效实验片《微空间》中,需要表现的特效画面是演员拿着的平面卡板上出现虚拟的三维立体图像,对于实拍中走动的演员以及手中不断晃动的卡板,就需要使用摄影机运动轨迹反求技术,才能使三维图像匹配到运动卡板上。下面就结合该片中的摄影机运动轨迹反求技术应用进行分析。
实拍环节,无论是在室内抠像室还是室外场景进行拍摄,都需要实拍的画面中有跟踪点,以强化跟踪数据提取的辨识度与准确性。这些跟踪点可以是人为添加进去的,例如,在抠像室的绿背上粘贴一些特殊的形状或符号标记,室外地面刻意摆放的树叶、石子等。跟踪点也可以是场景中本来就存在且有明显特征的物体,如室内实拍中带有花纹的地砖、墙上的画框等,室外实拍中建筑外墙的窗户、马路上的斑马线等,都可以作为跟踪点来使用。
在短片《微空间》制作前期,为保证后期跟踪的辨识度与准确性,在拍摄时针对手持卡板添加了特殊标记,如图1所示,这些标记点对后期跟踪起到了巨大的作用。

图1 黑色符号是添加的标记点
分析影像环节,这是在使用软件进行运动匹配前的重要一步,可以利用很短的时间来分析采用哪种工具和方式进行下一步工作,在项目制作进度中起到了事半功倍的效果。这些分析包括:摄影机的运动类型是移动还是摇镜头;实拍素材的格式、分辨率、像素比;需要在实拍画面的哪些位置添加虚拟元素;画面中哪些内容会干扰跟踪,等等[3]。只有合理正确地分析这些内容,才能保证在后面的摄影机运动轨迹反求中得到正确的结果。
与以往对地面或墙面等固定平面使用的摄影机运动轨迹反求思路不同的是,特效实验片《微空间》中以假定手持卡板静止的方式进行摄影机运动轨迹反求,然后计算出卡板的三维坐标信息,以及设定卡板静止的虚拟摄影机运动轨迹数据。因此,在确定本片是移动镜头类型的情况下,想在卡板上添加三维元素,就必须考虑到人物和背景画面的运动会干扰到针对卡板的摄影机运动轨迹反求,那么需要先对卡板进行平面透视跟踪,然后单独保留卡板的平面运动信息,这样才能单独对卡板进行摄影机运动轨迹反求。通过分析,可以提高后期摄影机运动轨迹反求的效率。
利用软件进行摄影机反向求解环节,当前期的准备工作做完后,就要开始解算摄影机的内外部属性,期间运动匹配工作人员要不断跟踪尝试和反复的数据校正,包括常见的两种解算方式:人工模拟与运动跟踪数据自动解算。人工模拟主要针对静帧画面、固定镜头拍摄的影像、运动模糊严重的镜头。运动跟踪数据自动解算则是基于照相测量法(photogrammetry)技术,利用软件程序对影像中有特征的二维图像进行跟踪,然后通过后台数据分析这些二维跟踪点的运动轨迹,计算出二维跟踪点在三维空间中的坐标数据,进而反向解算出拍摄时摄影机的运动轨迹,同时自动生成一个数字化运动轨迹数据的虚拟摄影机。目前,使用更多的则是运动跟踪数据自动解算这种方式,常用的摄影机运动轨迹反求软件有Boujou、PFtrack、Mocha、Syntheyes和 3D Equalizer。
在特效实验片《微空间》制作中,首先需要对实拍素材进行透视跟踪,为跟踪数据的准确性,此片中先采用Mocha软件进行跟踪,然后把生成的单独卡板的二维图像数据导入到Boujou软件里进行摄影机运动轨迹反求。最终得到了卡板三维空间的坐标信息以及针对卡板运动虚拟出的摄影机的运动轨迹,如图2所示。
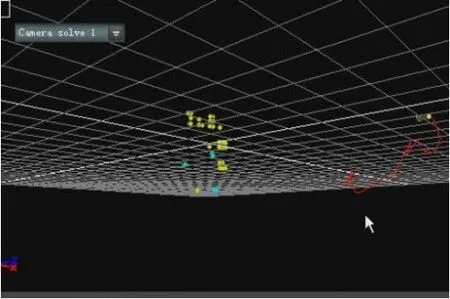
图2 红色曲线表示虚拟摄影机运动轨迹
检测阶段,运动匹配解算完成后,需要对其精准性进行检测,一般情况下会将一个简单三维模型放置到解算出的三维场景中,用来检测运动匹配的质量,通过查看三维模型与实拍影像间是否出现滑动、抖动来判断反求数据结果是否成功。这一环节虽然看似简单,但对后续工作的影响很大,一个错误的反求结果会导致后续所有的制作都无法继续完成。
在《微空间》的检测阶段,给卡板添加了三个空间层次的图像进行测试,分别是完全贴合卡板三维位置的底层、略微拉开距离的中间层以及拉开较远距离的外层,然后观察三个层次的图像是否保持稳定的透视,是否出现滑动、抖动的现象,这样可以比较全面地检查运动匹配结果的质量,进而判断出摄影机运动轨迹反求是否成功可靠。
导出数据阶段,在导出数据之前还有一些辅助数据需要处理,例如,建立合理的坐标平面、设置不同三维软件对应的坐标轴向,保留部分需要使用的三维跟踪点数据等。然后,这些数据将分别交给三维动画组、抠像组与后期合成组进行后续的视觉特效制作。
以《微空间》为例,因为需要在蓝色卡板上添加三维软件制作的数字模型,则需要把摄影机运动轨迹反求得到的数据点进行XYZ轴以及坐标面设定,这样后期在三维软件中就可以准确在对应卡板位置上创建三维模型与动画,并能够匹配到实拍影像中。
4 结语
电影技术的不断发展,摄影机运动轨迹反求技术的不断成熟,使电影艺术呈现出了更加丰富的视觉表现效果,不断创造出形式多样创新的视觉奇观,当观众惊叹屏幕中令人惊奇震撼的视觉特效时,作为电影创作人员仍然不能轻视电影技术的研究和分析,并不断在实践中进行创新。相信在不久的未来,新的电影技术将不断涌现出来,从而带给人们更多的视觉奇观。
