长江口深水航道通航尺度核定测量精度研究
2018-12-10
(1.上海海事测绘中心,上海 200090; 2.南京水利科学研究院,江苏 南京 210024)
1 研究背景
1.1 长江口深水航道概况
长江口12.5 m深水航道(航道底宽350~400 m,总长约90 km)自2010年3月14日试通航以来,大幅提升了长江口水道的通航能力,已经逐渐成为大型船舶进出长江黄金水道的重要通道,也是唯一的通道。根据对长江口12.5 m深水航道近几年通航船舶的统计可以看出,平均每天进出长江口12.5 m深水航道的船舶总数约127艘次[1]。
由于长江口同时受到上游流域下泄泥沙(包括本地滩地泥沙补给)和海洋涨潮流输沙的双重影响,12.5 m深水航道的年疏浚维护量已经达到7 500~8 000万m3,人力、物力投入巨大,影响了深水航道经济效益。
1.2 提高通航核定测量精度的意义
长江口深水航道通航尺度核定测量通常采用单波束月度检测方式。《海道测量规范》3.4.3[2]以及《沿海港口航道测量技术要求》4.2.3[3]规定,水深在0~20 m,深度测量极限误差为±0.3 m;《水运工程测量规范》8.1.6[4]规定,水深在0~20 m,深度测量极限误差为±0.2 m。目前国内常用的水深测量设备精度均已满足要求,但分米级的水深精度要求对于长江口深水航道来说仍不够精细;假设全航道水深数据仅相差10 cm,对于疏浚企业来说,整个长江口深水航道的疏浚工作量约达到300多万m3。因此,虽然水深数据均符合测量规范要求,但水深测量数据的精确与否,直接影响航运管理部门的通航决策、疏浚企业的生产经营以及业主的土方量核算。
1.3 影响因素及研究方向
影响长江口深水航道通航尺度核定测量水深成果数据精度的因素包括:定位精度、测深精度、实时潮位精度及其改正方法、实时声速、涌浪、海底底质、换能器静吃水变化、船舶动吃水变化等。
现代水深测量定位精度随着RTK技术的成熟以及北斗CORS站的建设,已经实现了厘米级,测深精度、实时潮位精度也已实现厘米级,声速剖面也能实时测得。因此研究分析重点应放在如何精确测定船舶换能器静吃水及其变化方面,其他影响因素如船舶动吃水变化影响虽然也很重要,但留待以后作进一步研究。
2 船舶换能器静吃水测定
2.1 船舶吃水
船舶吃水一般指船舶浸在水里的深度,船舶的底部至船体与水面相连处的垂直距离[5]。通过读取标在船艏和船艉的水尺,可以确定船舶的吃水。根据船舶的运动状态,船舶吃水又可分为静态吃水(简称“静吃水”)和动态吃水(简称“动吃水”)两类。
换能器静吃水不同于船舶静吃水值,为测量船舶静止状态下换能器(单波束换能器或多波束换能器)中心到水面的垂直距离[6]。无论采用何种安装方式测量船舶,其换能器静吃水值一般不等于船舶静吃水值,需要通过一系列方法进行测定。
2.2 必要性
影响水深测量数据精确性的因素很多,作为系统误差的组成部分,能否精确测定船舶换能器静吃水及其变化也是其中重要方面。测量船舶在作业过程中油、水的消耗或船舶经过补给后,都会引起船舶静吃水变化;如果换能器静吃水没有及时调整,势必会造成水深数据存在系统误差,而水深数据的失真,又将会影响航道的通航、疏浚、工程结算等。
3 传统换能器静吃水及其变化测定局限性
3.1 传统换能器静吃水测定
为满足海道测量规范、水运工程规范及沿海港口航道测量技术要求,传统换能器静吃水测定一般按下列步骤进行。
(1)测量船舶上排时,在岸边建立闭合水准点控制网;
(2)在测量船舶左右舷各设置两个观测点并做明显的标志以便长期使用;
(3)用全站仪分别观测测量船舶上各个特征点并记录三维坐标;
(4)计算左右舷观测点(至少两处)到换能器中心的高程差平均值g1,g2……;
(5)测量满载船舶在水中处于静止状态下,用皮尺量左右舷各观测点到水面的距离,读数5次以上,取其平均值作为各观测点净空观测值j1,j2……;
(6)得出测量船舶换能器静吃水h1=g1-j1,h2=g2-j2……,如图1所示;
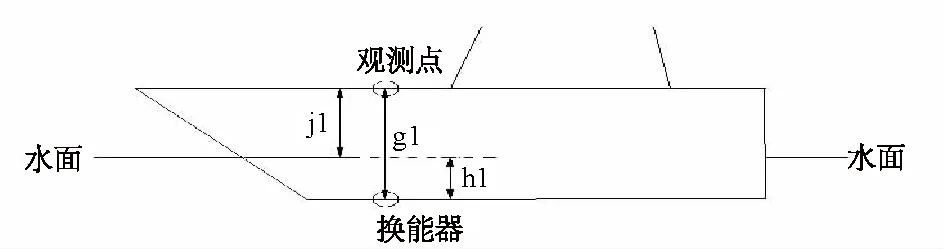
图1 传统换能器静吃水测定示意
(7)取h1,h2……平均值作为测量船舶换能器最终静吃水值[7]。
通过以上方法,选定应用于长江口深水航道通航尺度核定测量船舶A轮作为目标轮,经传统方式测定其换能器静吃水(见表1)。

表1 传统方式测定测量船满载情况下换能器静吃水值 m
3.2 传统换能器静吃水变化测定
传统换能器静吃水变化通常采用校仪方式测定,虽然从严格意义上来讲,传统校仪方式均以假定换能器吃水比较准确为基础,通过校仪方法来确定测区实际声速值,然而随着声速仪测量声速的便捷性和精确性提高,现有水深校仪更多是利用声速仪结合水砣绳、皮尺、测深仪来测定换能器静吃水变化。具体方法如下。
(1)到达测区,实测声速值并设定到测深仪;
(2)通过皮尺和水砣绳比对,确定水砣绳伸缩变化并调整相应刻度;
(3)在不同深度段扔水砣估读水深(因为水砣绳最小刻度为 0.5 m,需要读取到 0.1 m);
(4)通过水砣绳估读水深与测深仪实测水深比较,确定和调整换能器静吃水值[7]。
3.3 测定及校仪的局限性
传统换能器吃水测定及校仪方式均能满足现行规范要求,在水深数据精度要求不高的水域,也仍在广泛使用。但通过扔水砣方式校仪,存在很明显的缺陷。
(1)因为要在不同深度段校仪,所以测定势必要在测区进行,受风浪影响比较大。
(2)水砣绳最小刻度为 0.5 m,估读到 0.1 m受人为因素影响较大。
(3)受海底底质、潮流、涌浪、船舶摇摆等因素影响,很难保证估读到 0.1 m的精度。
鉴于此,传统校仪的精度只能达到分米级别,而对厘米级别的吃水变化很难及时发现,尤其是在船舶非满载情况下或者经过部分补给等情况下换能器静吃水精确测定存在困难。
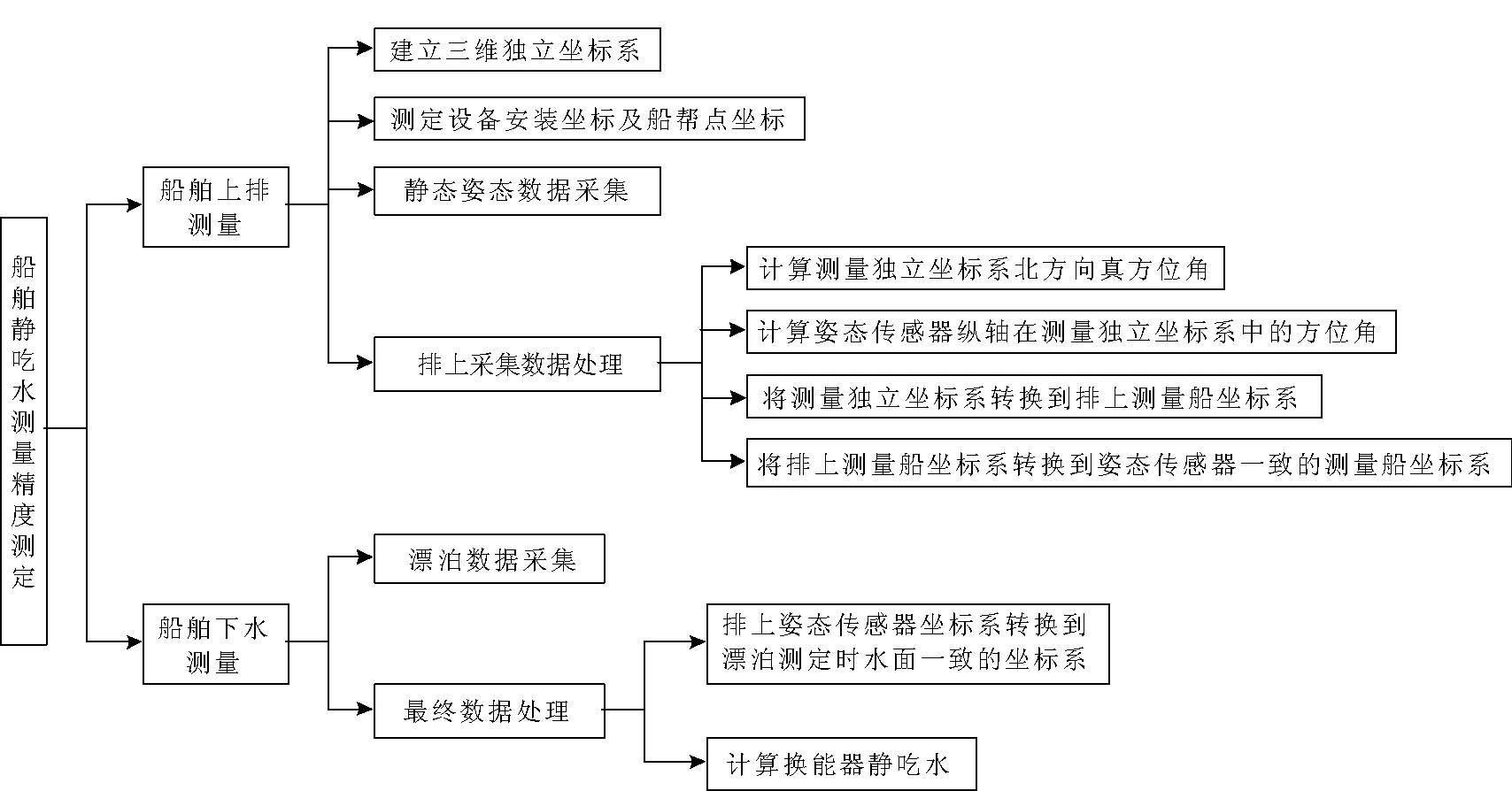
图2 船舶静吃水测量精度测定的基本流程
4 船舶换能器静吃水测量精度测定
虽然长江口深水航道维护测量是采用单波束测量,但测量船舶换能器静吃水精度测定不仅包括单波束换能器,同时也可以兼顾多波束换能器。随着现代水深测量多波束系统的广泛应用,以及多波束船型文件制作的实际需求,以多波束换能器为重点(单波束换能器根据多波束换能器关系可以直接推定得出)进行静吃水测定有着更广泛的用途。结合OCTANS姿态仪,其测定方法主要有船舶上排测量和船舶下水测量两大部分,基本流程如图2所示。
4.1 船舶上排测量
4.1.1 建立三维测量独立坐标系
测量船舶上排、建立闭合导线,在闭合导线上取点A,并在距离A大于200 m且与A通视处,设立一点B作为定向点,导线点均埋设水准钢标。A和B采用控制测量方式采集定位数据,数据后处理得到高斯投影平面坐标[8]。
导线点采用全站仪测定平面坐标及相对高程,以此为基础建立三维测量独立坐标系[9]。
4.1.2 测定测量船舶上设备安装及船帮点坐标
利用控制点测定多波束探头、姿态传感器、定位仪天线等设备中心点的三维坐标;同时测定在船帮上位于船首、船尾及船舷靠近多波束探头和姿态传感器处的观测点的三维坐标。将所有测定的坐标绘制船型示意图,如图3所示。
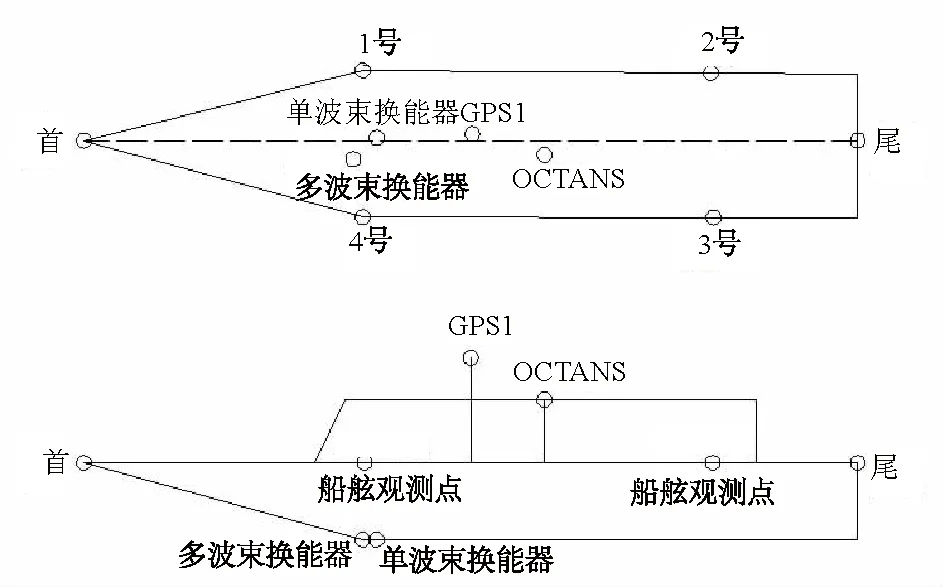
图3 船型示意
4.1.3 静态姿态数据采集
在测量船舶下水之前,运行测量设备,用Hypack采集姿态数据30 min。处理静态采集的数据,剔除异常数据后,求取平均值,得静态测定值:航向As,横摇Rs,纵摇Ps[10]。
4.1.4 排上采集数据初处理
经过以上步骤,测量船舶在排上所需的测量数据全部采集完毕,根据已有的数据进行初步计算。
(1)计算测量独立坐标系北方向真方位角[7]。
(2)计算姿态传感器纵轴在测量独立坐标系中的方位角。因为航向As是姿态传感器纵轴相对于大地坐标系的真方位角,α0是测量独立坐标系北方向相对于大地坐标系的真方位角,因此,姿态传感器纵轴在测量独立坐标系中的方位角为
As′=As-α0
比较姿态传感器纵轴及船首尾线在测量独立坐标系中的方位角,如果差值太大,则需重新安装姿态传感器并重新测量,直到差值到可控的范围内,以保证姿态传感器纵轴与船首尾线尽量吻合。
(3)将测量独立坐标系转换到排上测量船坐标系。通过坐标旋转、平移将测量独立坐标系通过坐标旋转和坐标平移转换到排上状态下的测量船坐标系(以在用多波束测深中心为原点,X′Y′平行于水平面,X′Y′Z′为左手坐标系:X′指向右舷,Y′指向船艏,Z′指向海底)。
(4)将排上测量船坐标系转换到与姿态传感器一致的测量船坐标系。
以上坐标数据XY方向都是在理想状态下(水平面)利用采集的数据计算得出的,但是船舶的实际状态是通过姿态传感器的数据反映出来的,如果将排上测量船坐标系转换到与姿态传感器一致的测量船坐标系,测量数据将会更加准确。
根据静态测定值Rs和Ps,再一次通过坐标旋转将设备中心位置及船帮上的各观测点的坐标归算到姿态坐标系中,建立与姿态传感器一致的测量船坐标系(坐标原点为多波束测深中心)。
4.2 船舶下水测量
4.2.1 漂泊数据采集
在测量船舶下水之后,选择合适天气和海域,进行静漂测量,运行测量设备,用Hypack采集姿态数据30 min;同时量测在船帮所设置的观测点处的水面净空高度。剔除漂泊姿态异常数据后,求取平均值,得到船舶静漂中姿态传感器测定值:横摇Rd,纵摇Pd。
4.2.2 数据处理
(1)排上的姿态传感器坐标系转换到与漂泊测定时水面一致的坐标系。实际作业时,人工量测数据均基于水平面量,为了计算方便,需要将排上的姿态传感器坐标系转换到与静漂测定时水面一致的坐标系。根据静漂测定值横摇Rd、纵摇Pd以及船舶在排上姿态传感器静态测定值Rs和Ps,再一次通过坐标旋转把各设备中心位置及船帮上的各观测点转换到与漂泊测定时水面一致的坐标系(坐标原点为多波束测深中心),从而得到各设备及观测点在船舶静漂测定时水面一致坐标系的三维坐标。
(2)计算换能器静吃水。通过静漂采集的船帮所设置的各观测点处的水面高度j2,以及坐标系转换后各观测点和换能器中心的垂直高差g2,即可以通过各观测点计算出换能器的静吃水h2=g2-j2,最后将各观测点计算出的各静吃水值求平均得到最终船舶静吃水值[7]。
4.3 新型测定方法的优点
该新型的测量船舶静吃水精确测定方法是在以往传统吃水测定的基础上,结合当前水上作业和交通船舶对水深数据精度要求提高而提出的,该方法主要有以下几个优点。
(1)静漂水域不必在测区,可以自由选择不受风浪影响水域,且能通过船帮上各观测点准确获得净空高度,减少环境因素影响。
(2)通过静漂,可以很方便得到即时船舶姿态数据,并通过计算,得出船舶在水面实际姿态下各设备、观测点间精确的、动态的、最新的垂直高差。
(3)通过每天工前工后静漂,可以精确测定船舶换能器静吃水。
(4)通过即时船舶姿态数据可以更新、制作即时准确的多波束系统船型文件,提高多波束内业处理效率。
(5)通过即时船舶姿态数据可以制作单波束设备安装偏心文件等。
(6)形成更为可靠、易掌握的测量外业作业流程规范,方便新入行的测量人员理解,并有助于其有效地完成测量任务。
(7)上交正式资料时有依据可寻,方便质检人员查验资料的准确性。
4.4 A轮精确测定静吃水值
2017年5月22日,采用上述方法对A轮进行船舶换能器静吃水精确测定,计算结果见图4。A转换能器静吃水值见表2。

表2 精确测定A轮满载情况下换能器静吃水值 m
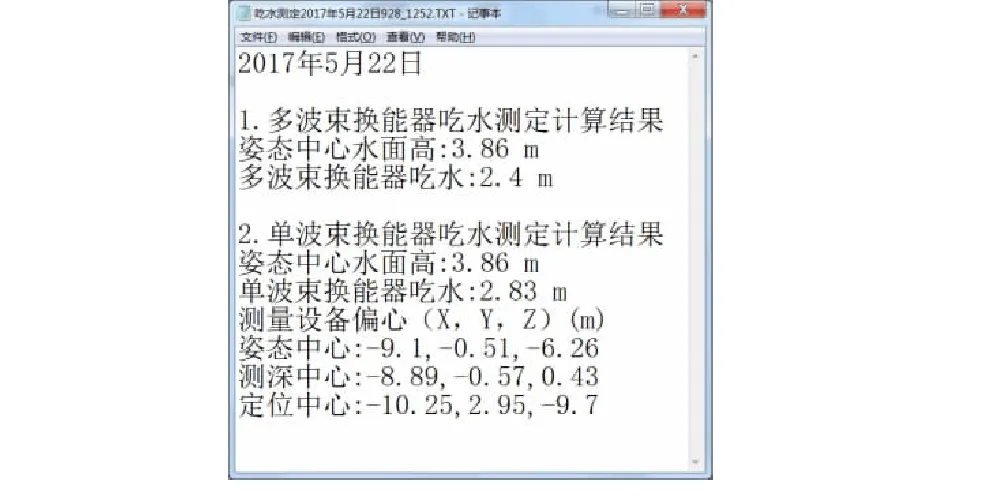
图4 多波束静态测定计算结果
由表1和表2可知:
(1)采用精确测定方式,换能器静吃水测值实现厘米级;
(2)采用精确测定方式,测量船舶单波束换能器静吃水满载情况下初次测定值与传统方式测定结果比较吻合,精确测定方式是可靠的;
(3)精确测定的测量结果与传统的测量结果差异不大,还无法体现出静吃水测量精度的提升, 关键还是在后续实际使用过程中体现出差异性。
5 A轮实施作业跟踪统计
2017年6~11月,A轮采用新的测定方式参与了每月1次的长江口深水航道维护检测测量任务,每个检测周期内A轮单波束换能器静吃水数据统计见表3。
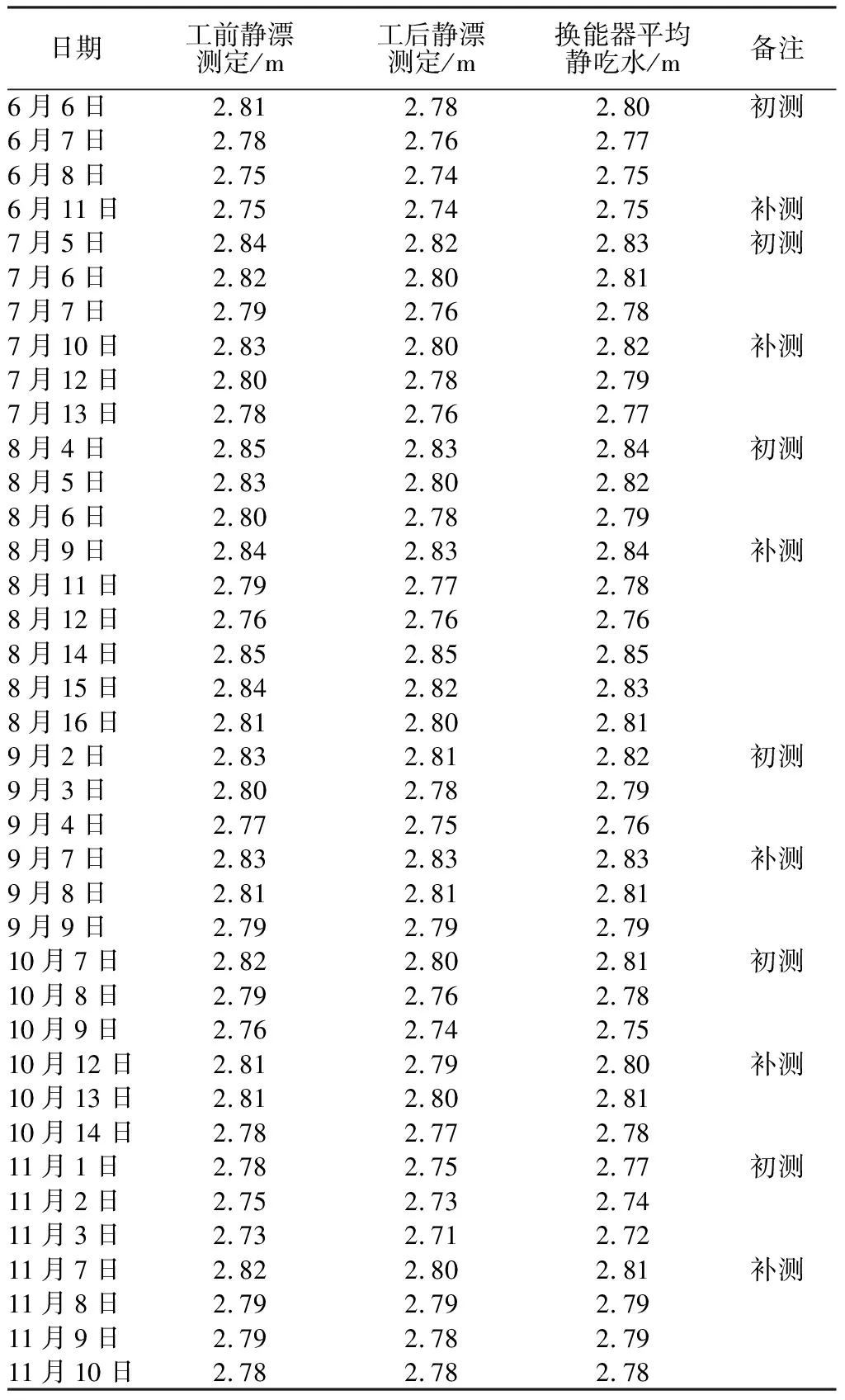
表3 A轮实施长江口深水航道维护检测单波束换能器静吃水值
由表3可以看出:
(1)A轮在实施测量中能够精确地确定并调整每日的换能器静吃水值,数值精确到厘米级,实现了精确测定的目的。
(2)通过静吃水值能清楚了解A轮何时接受过重新补给。
(3)A轮在实施补测过程中,因每次补测工作量不相同,引起吃水变化相对没有规律。
(4)除11月份外,A轮每次基本满载出航。在11月换能器静吃水值已经达到 2.72 m,与原始测定的 2.83 m相比,相差11 cm。
(5)虽然A轮在连续作业过程中船舶换能器每天静吃水变化都比较小,但通过精确测定方式都能测定其精确值。如果采用原有校仪方式(3.2和3.3中已作阐述),很难测定这种细微的变化,在实际作业过程中,也很难做出相对应的调整。随着连续作业天数的累积,细微的换能器静吃水变化,会对水深数据产生分米级的影响。
因此,单独筛选6~11月初测部分(见表4)作进一步分析。
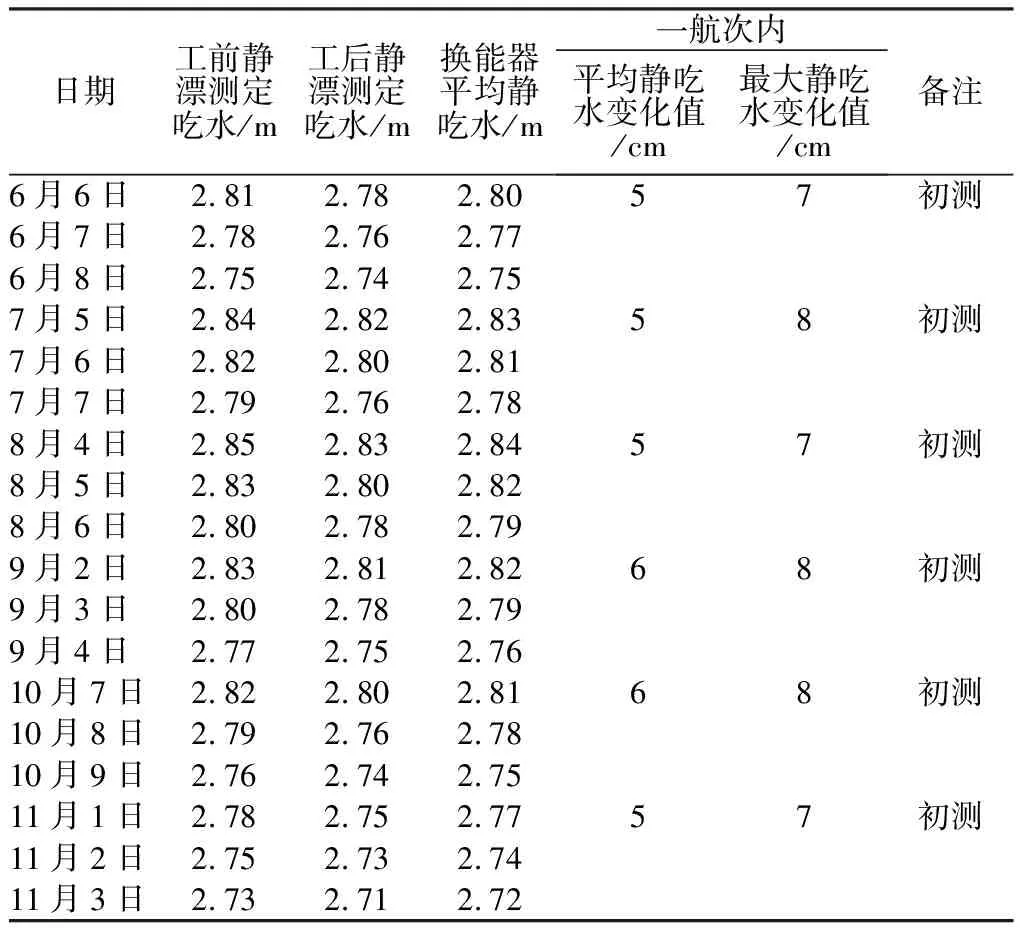
表4 A轮实施长江口深水航道维护检测初测单波束换能器静吃水值
从表4可以看出:
(1)在一个连续作业航次(3 d)内,平均静吃水变化非常稳定,基本在5~6 cm之间,以平均每天约2 cm递减。
(2)在一个连续作业航次(3 d)内,最大静吃水变化在7~8 cm,按此规律推算,从连续作业第五天开始,换能器静吃水变化基本达到10 cm以上。
(3)虽然在第五天换能器静吃水变化才达到10 cm以上,但海图水深是以dm为单位,在实际水深测量过程中,例如:原设定船舶换能器静吃水为2.80 m,换能器至海底实测水深为12.08 m,实时潮位为3 m,实际精确测定船舶换能器静吃水为2.74 m。
按照原换能器静吃水值,海图水深(D)=12.08+2.80-3=11.88≈11.9 m
按照精确测定换能器静吃水值,海图水深(D)=12.08+2.74-3=11.82≈11.8 m
因此,即使换能器静吃水变化调整在几厘米以内,因四舍五入的原因,调整已经对部分海图水深数据造成了分米级的影响。
6 意义及展望
6.1 意 义
长江口12.5 m深水航道是大型船舶进出长江黄金水道的重要通道,航运交通繁忙,受到各方高度重视。提高长江口深水航道通航尺度核定测量水深数据成果精度,有着非常显著的经济和社会效益。
(1)对进出口船舶的通航安全提供了有力保障。
(2)为决策部门研究落实加强长江口深水航道富余水深利用方案提供参考依据。
(3)对长江口深水航道内大型超宽船舶交会的边坡利用提供了数据支撑。
(4)对长江口深水航道适航水深浮泥利用研究提供数据基础。
(5)对航道疏浚企业的补挖补测提供了有效支持,加快航道维护过程,提高深水航道利用率。
(6)对长江口深水航道管理方工程结算提供了准确凭据。
6.2 展 望
本文虽然对船舶换能器静吃水及其变化的精确测定方面进行了探索,但仅提高静吃水测定精度是不够的,因为影响水深数据精度的因素有很多,而水深数据最终成果精度的提升需要各方面影响因素的全面提升。例如船舶动吃水在船舶高速低速时不同,在顶水顺水时也不同,这种船舶动吃水的实时变化对水深数据的准确性影响更大。
随着现代科技的发展,水深测量技术也在发生革命性的变化。国家陆海高程的统一、数字高程模型的全面覆盖以及RTK、PPK技术的成熟运用,再结合三维姿态传感器及测深系统的应用,未来的水深测量模式必然可以实现直接精确测量海底水深。本文所探讨的提升航道通航尺度核定测量精度是在水深测量技术发展过程中的一个过渡性措施。
