无信号灯十字交叉口车辆协作控制研究*
2018-12-08张文亮郑九洲里一峰曾凡超刘春廷刘国鹏
张文亮,郑九洲,里一峰,曾凡超,刘春廷,刘国鹏
无信号灯十字交叉口车辆协作控制研究*
张文亮,郑九洲,里一峰,曾凡超,刘春廷,刘国鹏
(辽宁工业大学汽车与交通工程学院,辽宁 锦州 121001)
随着无人驾驶技术、车联网、区块链技术的不断发展,如何打造更加完善的智能交通系统成为了当前研究的热点问题。针对无信号灯十字路口的车辆协作控制问题,文章探索在无人驾驶技术和车联网的基础上,融合区块链技术在车辆协作方面的可行性。主要包括区块链网络的搭建和车辆的控制,车辆之间通过共识算法产生区块,共享实时车辆信息,最后通过实车搭建实验平台初步验证了区块链网络的可行性。
车辆协作;十字交叉口;无信号灯;区块链技术
前言
在人工智能等高科技快速发展的时代背景下,无人驾驶领域研究的重点开始向多车协作转移。目前作为多车协作的重要组成部分,路口协作和车队协调已成为当前智能交通领域研究的热点[1]。区块链技术是比特币等虚拟数字加密货币体系的核心支撑技术[2],基于区块链技术,针对无人驾驶车辆在经过路口时的协作控制问题进行研究,通过在本地计算机的虚拟机上搭建区块链网络进行实验,再移植到模型车在实验室环境下进行实验,主要包括区块链网络的搭建和车辆的控制。车辆之间通过共识算法产生区块,共享实时车辆信息,验证了区块链网络在无信号灯十字交叉口车辆协作控制的可行性。
1 区块链网络的搭建
基于区块链网络在计算机上进行无信号灯十字交叉口车辆数据查询可行性验证。
(1)节点信息
该模块主要进行车辆节点的注册,车辆节点填写相关信息并注册成功之后,系统会在本地为该节点生成一个以地址命名的文档,里面存储公钥私钥信息,用于在区块链网络上传输数据。申请成功之后,系统会为其分配一对公钥和私钥,存储于本地。生成公钥和私钥信息如图1所示:

图1 申请生成公钥和私钥信息图
(2)开启共识
打开节点的配置文件protocol.json,首先修改Magic值,Magic用于识别消息的来源网络,指定不同的Magic确保NEO区块链中的不同网络信息在传输过程中不会发送到其它网络。然后修改StandbyValidators,填写上一步记下来的4个公钥。最后修改SeedList,填写IP地址,端口号保持不变。
最后将修改过的protocol.json复制到 4 个节点的客户端目录下,替换之前的protocol.json的文件。然后在4台虚拟机上依次输入以下命令启动节点,打开钱包,开启共识。具体如下:
(a)启动节点:
dotnet neo-cli.dll
(b)打开钱包:
open wallet wallet1.db3
(c)开启共识:
start consensus
4个节点的共识过程如图2所示。
图2 开启共识过程图
(3)获取数据模块
每个节点都可选的提供了一套API接口,用于从节点获取区块链数据。接口通过JSON-RPC的方式提供,底层使用HTTP/HTTPS协议进行通讯。要启动一个提供RPC服务的节点,可运行以下命令:
dotnet neo-cli.dll/rpc

2 车辆路口协作实验
无人驾驶车辆安全通过交叉口,需根据其他有人驾驶车辆的当前状态和预测行为进行相应的控制。按照无人驾驶车辆的当前环境是否构成安全条件,将无人驾驶车辆的操控行为离散为不同的状态,如加速、减速、停车等。有限状态机是表示有限个状态以及在这些状态之间转移和动作等行为的数学模型,它可以用状态转移图和多种类型的状态转移表来表示[4]。文中引入有限状态机模型来描述无人驾驶车辆在交叉口的驾驶意图及状态转移。进入交叉口的无人驾驶车辆一般有左转、直行和右转3种状态。而这几种状态往往是车辆根据目的地和具体的环境做出的全局路径规划来决定,一旦确定了在该交叉口的行驶方向,每个方向又可以作为原状态扩展为一个详细的有限状态机模型,如图3所示。
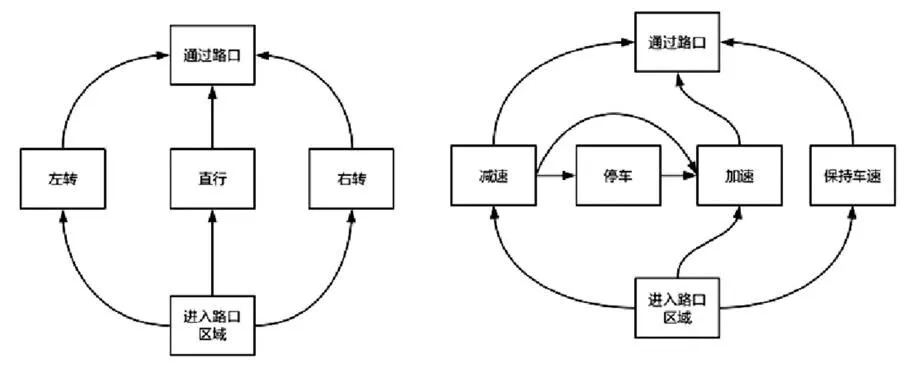
图3 车辆路口协作模型图
按照模型分层控制的思想,可分为3层:
(1)车辆顶层控制器:主要作用是提取本车的期望速度,并根据当前车辆位置和时间历程综合确定本车的目标车速。其输入量为接收到路口控制器的控制信息以及当前车辆的位置信息,输出为本车的目标速度。
(2)车辆底层控制器:根据上层算法提供的期望车速和当前的自车车速,输出节气门开度和刹车力矩值,从而控制车速。
(3)宏观路口控制器:它是本系统的核心控制器,负责协调车辆在路口的通行。其输入量为所有车辆发来的自车状态信息,包括当前位置、速度以及方向,其输出量为车辆通过路口的期望速度。车辆的顶层控制器和底层控制器构成无人驾驶车辆的控制系统,其中车辆上安装的无线发送传感器将车辆当前的状态信息(包括车辆的 ID、速度信息、位置信息等)发送给路口控制器,车辆上的无线接收传感器接收来自路口控制器对车辆的控制信息,通过车辆的顶层控制器提取出对自己车辆控制的目标速度,然后底层控制器通过对目标速度和车辆的当前速度进行比较,输出控制车辆动力学模型的油门开度和制动力矩,使车辆尽快的跟踪目标速度[5]。
两辆模型车在区块链网络中获取双方速度信息后,根据预期到达交叉口的时间判断出二者可能有潜在的冲突,且1号模型车先到达路口,两辆模型车以当前车速通过路口时会产生不安全因素,通过两辆模型车的实际车速度变化曲线分别如图4和图5所示。

图4 1号模型车的速度曲线图
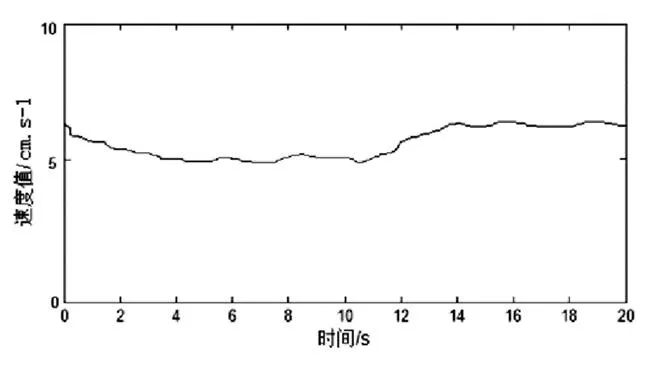
图5 2号模型车的速度曲线图
由图4和图5中可以分析,两辆模型车通过网络中的数据判断出处于不安全状况,于是1号模型车缓慢加速通过十字路口,2号模型车逐步减小目标车速;在 t=14s时,判断出两辆模型车处于安全状态,于是通过调节目标车速至原始目标车速,继续行驶。
3 结论
在“区块链技术”高科技技术下,针对无人驾驶车辆在经过路口时的协作控制问题进行研究,通过在本地计算机的虚拟机上搭建区块链网络进行实验,再移植到模型车在实验室环境下进行实验,主要包括区块链网络的搭建和车辆的控制。车辆之间通过共识算法产生区块,共享实时车辆信息,验证了区块链网络在无信号灯十字交叉口车辆协作控制的可行性,为高级辅助驾驶和无人驾驶研究领域提供技术支撑。
[1] 张耀丹.无人驾驶汽车的现状及发展趋势[J].汽车实用技术,2018 (06):10-11.
[2] 王继业,高灵超,董爱强,等.基于区块链的数据安全共享网络体系研究[J].计算机研究与发展,2017,54(04):742-749.
[3] 韩璇,刘亚敏.区块链技术中的共识机制研究[J].信息网络安全,2017(09):147-152.
[4] 穆康乐.无人驾驶汽车发展现状及未来展望[J].电子技术与软件工程,2017(21):112-114.
[5] 倪继平.基于机器学习的无人驾驶技术研究[J].计算机与网络, 2018,44(06):68-70.
Research on Vehicle Coordination Control of Crossroads without Signal Lights*
Zhang Wenliang, Zheng Jiuzhou, Li Yifeng, Zeng Fanchao, Liu Chunting, Liu Guopeng
( College of Automobile and Traffic Engineering, Liaoning University of Technology, Liaoning Jinzhou 121001 )
How to build a more complete intelligent transportation system has become a hot issue in current research, with the continuous development of unmanned technology, vehicle networking and blockchain technology. Explore the feasibility of combining blockchain technology in vehicle cooperation based on unmanned driving technology and vehicle networking, aiming at the problem of vehicle cooperative control at the crossroads without signal lights. It mainly includes the constru -ction of blockchain network and the control of vehicles. Vehicles generate blocks by consensus algorithm and share real-time vehicle information. Finally, the feasibility of blockchain network is preliminarily verified by the actual vehicle construc -tion experimental platform.
vehicle collaboration;crossroad;no signal light;blockchain technology
B
1671-7988(2018)22-184-03
TP23
B
1671-7988(2018)22-184-03
TP23
张文亮,就职于辽宁工业大学汽车与交通工程学院,研究方向: 汽车安全与智能化控制技术。
无信号灯交叉路口特定工况车辆协作控制研究(*2018年辽宁工业大学大学生创新创业训练项目(编号201701028)资助)。
10.16638/j.cnki.1671-7988.2018.22.066
