一种改进的车道线识别算法*
2018-12-08周越陈学文
周越,陈学文
一种改进的车道线识别算法*
周越,陈学文
(辽宁工业大学汽车与交通工程学院,辽宁 锦州 121001)
车道线识别是车辆辅助驾驶系统中重要组成部分。针对传统Hough变换,文章做出了改进,首先,对道路图像进行感兴趣区域划分、灰度化、二值化、中值滤波、边缘检测预处理,然后考虑到车道线满足一定角度和长度的限制,对车道线进行极径极角的约束,最后实现车道线提取。实验表明该方法具有较好的实时性和鲁棒性。
车道线检测;中值滤波;改进Hough变换
引言
车辆辅助驾驶系统的使用可以有效避免交通事故的发生。而车道线的正确有效识别是车辆辅助驾驶系统(如车道偏离预警系统、自适应巡航系统等)基础而重要的环节。目前,车道线的识别主要分为基于特征识别和基于模型识别,基于特征的识别主要利用车辆的纹理、对称性等,基于模型的识别主要是设计车道线模型,如直线、抛物线、双曲线,最后进行车道线拟合。
Hough变换作为一种经典的车道线检测算法,本文对其进行了极径极角的约束,从而提高算法的实时性鲁棒性。
1 图像预处理
1.1 感兴趣区域确定
一张图片中存在大量无用信息和干扰信息,对这些信息的去除,可以有效的提高算法实时性和准确性。通过对大量图片的研究可以发现,车道线信息主要集中在图像的下2/3处,图1表示原始图像,图二表示感兴趣区域图像。

图1 原图

图2 感兴趣区域
1.2 灰度化和滤波处理
一般车载摄像头获得的视频图像是彩色图片,为了减少运算量,提高算法速度,需要把彩色图像转换为灰度图像。图像灰度化常用的方法有最大值法、平均法、分量提取法等。本文所用的方法是加权平均法,即对一张彩色图片分别给R、G、B分量分配权值0.299,0.587,0.114,然后计算得到每个像素的灰度值,结果如图3所示。

图3 灰度化图像
常见的滤波方法分为空间域滤波法和频域滤波法。频域滤波一般计算量较大难以满足实时性,空间域滤波简单,计算量小,滤波效果明显。而空域滤波又可分为线性滤波和非线性滤波。本文选取的是空域滤波中的非线性中值滤波法,中值滤波本质上是一种统计顺序滤波器,对于原图像中某点(,),中值滤波以该点为中心的领域内所有像素的统一排序中值作为(,)点的响应。相较于线性滤波,中值滤波可以直接忽略掉像素领域之内包含的噪声点,并且在降噪同时,引起的模糊效应较低。图4为加入椒盐噪声图,图5为中值滤波结果。
图4 加入椒盐滤波

图5 中值滤波
1.3 二值化与边缘检测
所谓二值化就是将图像转换为只含有0,1像素值的图像,可以很好的将所需要识别和分析的目标分离出来。本文通过利用大津法将车道信息提取出来,大津法的基本原理如下:

图6 大津法二值化

边缘检测是目标区域识别、区域形状提取等图像分析领域十分重要的基础。边缘检测常用的方法有Roberts算子、Sobel算子、Prwitte算子,LoG算子。本文所采用的的是Canny算子,其基本原理是:采用二维高斯函数的任一方向上的一阶方向导数为噪声滤波器,通过与图像f(x,y)卷积进行滤波,然后对滤波后的图像寻找图像梯度的局部极大值了,以确定边缘。Canny算子边缘结果如图7。
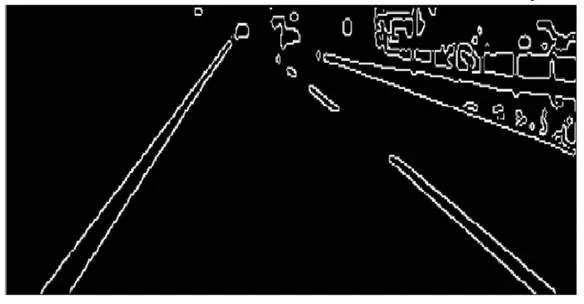
图7 Canny边缘提取
2 改进Hough变换
2.1 霍夫变换基本原理
霍夫变换的基本思想是点-线的对偶性,图像坐标系中一条直线上的所有点对应到参数空间就是多条相交的直线。反之,参数空间相交于同一点的直线对应到图像坐标系中就是一条直线,在实际操作中一般采用极坐标以避免斜率无限大的情况,极坐标如下。

图8 Hough变换与改进Hough变换车道线提取对比
2.2 改进霍夫变换
对大量图片实验分析发现,车道线一般在图片左右两侧具有一定的角度和长度,通过对极径极角的约束可以有效的确定有效区域,提高算法速度。对于左车道线极角满足[θ1,θ2],极径满足[ρ1,ρ2],对于右车道线满足[θ1,θ2],极径满足[ρ1,ρ2],本文中,左车道线角度范围为[20,75],右车道线角度范围为[105,165],极径在极角约束之后也间接的产生。
3 实验结果分析
本文算法基于Matlab环境实现,处理的图像大小为540x240。对300幅图通过对传统霍夫变换和改机霍夫变换进行比较,结果如下,如图8所示。可以看出传统的霍夫变换由于没有进行极角极径的约束可能会出现误检的情况,而改进的霍夫变换可以对车道线进行很好的提取目标车道线。
4 总结
本文首先通过对车道图片进行预处理,减少干扰项,提高了运算速度;然后对霍夫变换进行改进,通过改进后的的霍夫变换可以很好的识别出目标车道线,误检率低,满足一定的实时性。同时,该方法车道线的正确识别对ACC、FAC等辅助驾驶系统具有重要意义。
[1] 燕磬.基于机器视觉的车道线识别技术研究[D].长沙理工大学,2015.
[2] 张翀,范新南.基于直线模型的车道线实时检测方法[J].计算机工程与设计,2012,33(01):295-299.
[3] 王宝锋,齐志权,马国成,陈思忠.基于动态区域规划的双模型车道线识别方法[J].北京理工大学学报,2014,34(05):485-489.
[4] 王越,范先星,刘金城,庞振营.结构化道路上应用区域划分的车道线识别[J].计算机应用,2015,35(09):2687-2691+2700.
[5] 周磊,任国全,肖浩,李冬伟.结构化道路车道线快速检测的一种改进算法[J].计算机仿真,2012,29(04):362-366.
[6] 战宇辰.基于机器视觉的道路及车辆检测技术研究[D].北京工业大学,2016.
An Improved Lane Recognition Algorithm*
Zhou Yue, Chen Xuewen
(School of automobile and traffic engineering, Liaoning University of Technology, Liaoning Jinzhou 121001)
Lane recognition is an important part of vehicle auxiliary driving system. In this paper, the traditional Hough transform is improved. Firstly, the road image is preprocessed by region of interest partition, grayscale, binarization, median filtering and edge detection. Then, considering that the lane line meets certain angle and length constraints, the lane line is constrained by radius polar angle. Finally, the lane line is extracted. Experiments show that the method has good real-time performance and robustness.
Lane detection; median filtering; Improved Hough transform
B
1671-7988(2018)22-88-03
U471.1
B
1671-7988(2018)22-88-03
U471.1
周越,就读于辽宁工业大学,研究方向为汽车安全研究。
辽宁省自然科学基金项目(201602368)。
10.16638/j.cnki.1671-7988.2018.22.030
