智能驾驶汽车纵向运动控制研究综述
2018-12-08罗玉峰钟陈志鹏陈齐平魏佳成苏校
罗玉峰,钟陈志鹏,陈齐平,魏佳成,苏校
智能驾驶汽车纵向运动控制研究综述
罗玉峰,钟陈志鹏,陈齐平,魏佳成,苏校
(华东交通大学机电与车辆工程学院,江西 南昌 330013)
为提升智能驾驶路径跟随行驶性能,文章通过分析国内外智能驾驶纵向控制的直接式和分层式设计方法,论述了纵向控制理论方法和技术应用的研究现状。目前研究主要是应用解耦控制系统来单独研究纵向控制,但存在系统模型单一、计算方法受限和未结合车联网技术等不足。因此,未来纵向控制技术将结合车联网通信技术、人工智能以及耦合横向控制进行研究,以实现智能、高效和安全的纵向控制行驶性能。
智能驾驶;纵向控制;直接式;分层式
前言
智能驾驶汽车是汽车研究领域和行业发展的热点,其智能化程度与智能驾驶的安全和效率方面有重要联系。随着交通环境日益复杂、能源耗费增加以及生活环境污染等问题日益突出,智能驾驶作为智慧交通发展新方向逐渐受到人们重视[1]。智能驾驶概念的提出是为了提升公路系统的服务能力,Shladover等[2]人提出了智能驾驶车辆由纵向控制系统和横向控制系统组成。
纵向控制作为智能驾驶汽车运动控制的重要组成部分,也是智能驾驶研究领域的核心难题之一。纵向运动控制[3]主要通过对油门和制动之间的协调控制,达到对期望速度的精确跟随。要求在智能驾驶过程中实现加速、减速、制动和车速保持等自动纵向控制。由于纵向控制系统[4]具有参数不确定性、时滞性和高度非线性动态特性等特征,为典型的多输入-多输出复杂耦合动力学系统。如何构建可处理其参数不确定及高度非线性等特性的控制模型是智能驾驶的难点,且是智能车辆研究领域的热点。
本文主要介绍了国内外智能驾驶汽车的纵向运动控制技术的研究及应用现状,并对未来纵向运动控制的研究进行了展望,为今后智能驾驶智能化的提升奠定一定的基础。纵向运动控制方式可分为直接控制式和分层控制式。
1 直接控制式
直接式运动控制是通过纵向控制器直接控制期望制动压力和节气门开度,从而实现对跟随速度和跟随减速度直接控制,具有快速响应等特点。具体结构如图1所示。
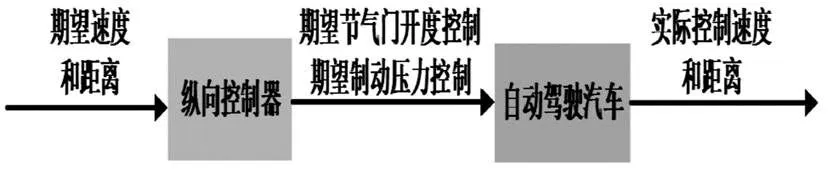
图1 直接式控制
以下研究是采用直接式纵向控制的典型研究成果,首先是国外学者的研究。
PID控制作为现代控制理论的基础,在智能驾驶控制研究领域应用广泛。有学者采用该方法建立复杂的非线性系统模型来解决控制系统的非线性问题。
1994年,Hoyong K等[5]设计了一种直接式纵向多控制器系统,该系统由PID、PI、滑模控制器和模糊控制器四部分构成。系统通过专家经验知识设计了控制器间的协调切换逻辑,可以在不同工况下充分发挥其优势。该系统的缺点是由于控制器的频繁切换会使执行机构存在时滞和振动。
2007年,卡内基梅隆大学自动驾驶研究团队[6]采用直接式控制结构,分别构建了油门和制动的非线性 PID 控制策略,给出基于速度偏差的油门和制动切换逻辑。该纵向控制系统已应用于 Boss 智能车,对于控制系统非线性特征有良好的适应性。
有学者提出采用特定的控制策略对控制系统的参数不确定、非线性等因素进行模拟,例如模糊控制等得到较好的效果。2001年,K Yi等[7]提出了一种前馈-反馈结合控制算法,该控制系统由油门控制算法、制动控制算法和油门制动控制策略构成,对于车辆参数的不确定性有良好的自适应性。
2012年,土耳其的V Sezer等[8]人设计了一种智能车速度控制器。该控制器是有两个串联Mamdani型的是基于模糊逻辑推理系统,串联结构通过减少模糊控制规则,从而方便了控制器设计,研究结果显示车辆行驶在急转向工况时的控制器性能更好。
2015年,E Jullierme等[9]采用系统辨识方法建立纵向动力学模型,采用逆动力学模型补偿系统的非线性特性,基于PI 和逆动力学综合模型设计车辆纵向速度自动控制策略。
2015年,韩国首尔大学K Hakgo等[10]建立了具有集总参数特征的车辆纵向线性模型。考虑到集总参数的时变性,提出了车辆参数时变自适应速度控制策略,并通过仿真和实验验证了所提出方法的有效性和鲁棒性。
2017年,K Liu等[11]提出一种基于横向干扰的纵向模型预测控制方法。该方法创新地应用虚拟引导车模型来预测实际车辆的未来行为,将控制系统简化为间距跟踪模型。该简化模型用于描述安全性和其他车超车变道的可能性,通过CarSim软件仿真得出该方法可以有效地降低横向干扰对纵向控制的影响。
2017年,Andrea Raffin等[12]提出增强自适应模型控制方法(MRAC),基于该方法设计了一种不依赖于智能车辆自身参数的纵向控制器,且具有一定的速度跟随能力。通过CarSim-Simulink的联合仿真结果显示对该方法进行了评估。
国内相关学者在这一方面也进行了研究,针对于纵向控制系统设计难点提出了有效的解决办法。
2006年,山东大学的李贻斌等[13]采用直接式控制结构,基于模糊控制算法和遗传算法分别设计了制动控制器和油门控制器,对油门和制动的切换逻辑进行分析与设计,油门控制器和制动控制器共同构成智能车辆纵向控制器。
2009年,清华大学宾洋等[14]分别建立了加速和制动时能反映车间纵向动力学特性的控制模型。提出一种非线性干扰解耦和变结构控制原理的鲁棒控制方法。该方法不仅克服车辆纵向动力学系统的非线性,且对内部不确定性及外界干扰等影响具有良好的鲁棒性能,达到全局最优控制的目标。
2011年,西南交通大学的任殿波等[15]针对具有参数不确定性的车辆跟随纵向控制研究,设计了基于车辆纵向动力学模型的纵向跟随直接自适应滑膜控制规律。仿真结果表明该研究的控制规律能使车辆间距误差有较快的收敛速度。
2013年,重庆大学崔明月等[16]应用Backstepping方法设计了一种自适应控制器,并通过对信号的滤波处理简化了控制器的设计模型,该设计克服了智能驾驶运动控制的参数不确定的问题。作者通过运用Lyapunov稳定性理论与Barbalat定理验证了系统的稳定性,并通过进化规划算法进一步优化了控制器的参数。
2013年,厦门大学郭景华等[17]设计了一种多滑模纵向直接式控制系统,运用模糊逻辑调节滑模增益系数,有效地降低了外部不确定性及动态扰动对车辆纵向控制系统的影响,采用李雅普诺夫方法验证了所设计控制系统的稳定性。同时设计了加速与制动切换逻辑,保证了整个系统有较高的控制精度以及智能车行驶稳定性。滑膜变结构控制作为一种鲁棒性控制方法,不仅对于外界不确定干扰和不确定参数等具有较好的鲁棒性和抗干扰能力,而且可以通过滑动模态的设计获得满意的动态品质。该方法具有控制简单、易于实现的特点。

图2 分层式控制
2013年,北京理工大学龚建伟等[18]提出使用一个增量式PID控制器实现油门制动协调控制,其实车实验结果表明路面的起伏未加大纵向控制的稳态误差,并可以平稳换挡。该方法针对PID控制的不足而设计,可以较好地满足期望控制,克服控制器的参数对于车辆参数和路径参数的变化适应性不强等不足方面。
2017年,清华大学李升波等[19]基于分布式H∞最优控制方法设计一种鲁棒纵向控制器,该系统通过信息交换矩阵的线性变换和特征值分解转换成一个不确定的、对角非线性系统。并通过与非鲁棒性控制器对比,分析设计系统的鲁棒稳定性和纵向稳定性。
2017年,西安工业大学的高嵩等[20]在建立车辆速度跟随控制模型时考虑风阻和道路坡度等环境信息,并通过反馈线性化处理控制模型,利用滑膜控制增加模型的鲁棒性。仿真结果表明设计的系统能够获得准确的期望跟踪速度,同时对参数变化和外界环境干扰等有良好的鲁棒性。
2017年,国防科技大学的黄振华等[21]提出一种参数批量化处理的强化学习算法(PBACV)为了获得自动驾驶车辆的最优纵向控制。该方法的采用actor-critic学习结构,且为了提高学习效率采用最小二乘方法更新参数。通过大量的实车实验显示通过强化学习的方法纵向控制性能超过了传统的纵向控制方法。
直接式纵向控制器设计采用自适应控制、PID控制等控制方法,建立一种非线性系统模型。目的为了提高系统的自适应能力,降低参数不确定、非线性等对系统的影响。该设计方法集成度高,但是开发难度高。
2 分层式纵向控制
智能驾驶车辆纵向动力学模型是一个复杂多变的非线性系统,大部分参数在测量时精度不高。通过设计单个控制器来实现多个性能的控制具有一定开发难度。为降低纵向控制系统的开发难度,有研究者提出采用一种多层次控制结构来建立控制系统模型。具体结构如图2所示。
分层式控制根据控制目标的不同设计上位控制器和下位控制器,上位控制器是用来产生期望车速和期望加速度,下位控制器根据上位控制的期望值产生期望的油门开度和制动压力,以实现对速度和制动的分层控制。
日产汽车公司技术中心的研究者[22]和意大利M Canale等[23]人在对车辆纵向控制系统研究中,模拟不同工况下驾驶员驾驶操作特性设计驾驶员参考模型,基于该参考模型设计前馈控制和补偿反馈控制相结合的上位控制器,通过调节参考模型来调整上位控制器的控制参数,从而使车辆纵向控制系统满足各种行驶工况。
2008 年,宝马汽车公司[24]提出了可修正的反馈 PID上位控制策略,将反馈状态量的比例系数表征为时距函数,该策略的反馈状态量为相对速度、距离误差,此外,为了降低前方目标运动状态的干扰,构建了加速度干扰估计器,可对加速度干扰进行有效补偿。
2009年,清华大学的张磊等[25]人基于驾驶员操纵行为特性自学习的控制算法设计了车辆纵向上位控制器。基于驾驶员行为动作时刻的TTC统计以及神经网络分类器,设计模拟驾驶员行为的学习式上位控制器,并应用于车辆纵向驾驶辅助系统。
YX. Lu 等[26]根据前期结构研究,提出了一种车辆纵向运动的上位滑模变结构控制算法。该方法可以获得期望的节气门开度和制动力矩实现期望的速度跟随,通过实验检验了该上位控制算法的有效性。
上位控制器给下位控制器提供期望速度或加速度,基于下位控制器设计上位控制器可不考虑纵向控制模型的参数不确定性、建模误差以及外界干扰的影响。
以下是下位器控制器设计的典型研究成果。
2003年,东京大学M Omae[27]基于H-infinity鲁棒控制方法,设计了前馈/H-infinity反馈纵向下位控制器,该设计克服车辆纵向动力学的参数不确定性以及执行机构产生的系统延时,试验结果表明所设计纵向下位控制器具有良好的鲁棒性和稳定性。
2003年,韩国全北大学 Liang H等[28][29]针对制动工况下车辆纵向控制问题,提出变参数滑模下位控制策略,根据车辆行驶过程中状态信息来实时估计滑动模态控制参数。仿真结果表明该方法可以有效降低跟随过程中的误差。此外,J. C. Gerdes 等[30]和 L. Nouveliere 等[31]均提出了变结构纵向下位控制方法,其实现对车辆纵向加速度的快速、平稳、精确跟踪。
2007 年,Gao F等[32]构建了多模型分层切换纵向下位鲁棒控制方法,主要针对车辆纵向动力学系统中参数不确定和模型不确定,通过实车实验验证了方法的鲁棒性和扰动抑制能力。
考虑到车辆纵向控制系统的非线性与参数不确性,清华大学侯德藻[33][34]在车辆纵向主动避撞控制系统的研究中设计了由规范模型、前馈补偿器及鲁棒反馈补偿器组成的模型匹配下位控制器。
为了准确描述车辆纵向动力学特性,清华大学的高锋等[35]人基于鲁棒控制理论设计了多模型分层切换纵向下位控制器,并分析与验证了该控制算法的鲁棒稳定性。
2017年,国防科技大学的朱琪等[36]提出一种自适应纵向控制方法,它由基于速度的决策学习跟随层和基于模型的路径跟随层组成。决策跟随层通过在线强化学习算法实现学习,实时调整跟随距离。路径跟随层作为中间控制对节气门和制进行控制。通过Carsim仿真验证该方法的良好控制性能。
2017年,厦门大学郭景华等[37]设计了一种新型的模糊滑模控制分层式智能驾驶速度控制器,通过上位控制器控制输出期望加速度保证智能驾驶的安全性和舒适性。下位控制器由新型模糊自适应滑模控制结构(SMC)构成,可以较好的解决系统存在非线性、不确定干扰和不确定定参数等因素的影响。仿真和实验表明该设计具有良好的路径跟踪性能。
2017年,J Liu等[38]采用模型预测方法设计一种自动驾驶高速非结构道路行驶下避撞算法,该方法构建一个多层控制问题在观测的环境范围内优化期望速度和期望转向,仿真结果显示自动驾驶车辆在经过不同的环境下具有良好的安全性和稳定性。
下位器执行上位器的最优策略,其工作主要克服系统的时滞、振动和非线性等难题。分层式通过协调上、下位控制器实现纵向运动控制,相比直接式控制开发难度降低。
综上所述,智能驾驶纵向控制系统为一种结构复杂、多变量并且高度非线性的控制系统。直接式纵向控制考虑了系统的复杂性和非线性等特点,具有集成程度高,模型准确性强的特点。但是其开发难度较高,灵活性较差。分层纵向控制通过协调油门和制动分层控制,开发相对易实现。但是由于分层式控制会忽略参数不确定性、模型误差以及外界干扰等的影响,建模的准确性会受到一定的影响。
3 纵向控制研究趋势
综上所述,国内外研究人员在智能驾驶的纵向运动控制技术上取得了重要的成果。智能驾驶纵向控制系统存在高度非线性等问题,以及纵向横向控制存在必然的耦合关系。随着车联网技术和人工智能技术的发展,未来智能交通环境给运动控制技术带来新的挑战。目前智能驾驶纵向运动控制方面还有许多问题和困难仍需我们来探索和攻克。下面对该领域未来可能的发展方向作初步的展望。
3.1 从解耦式向耦合式研究发展
前期的研究主要基于解耦纵向和横向控制来研究,通过直接式或者分层式来建立纵向动力学模型。解耦式忽略了横向运动对纵向运动的影响,会对模型的精确性产生影响。在面对未来发展智能化交通的推动下,如何建立更加准确,更加高效完整的智能驾驶汽车动力学纵向控制模型,并运用该模型解决控制系统参数不确定、存在时滞和高度非线性等难点问题有待进一步解决。
3.2 人工智能应用于智能驾驶控制技术
未来的智能驾驶研究需要匹配度更高的系统模型,则需要考虑更多因素进行研究。纵向控制模型不仅需要更加准确的数学模型实现横向纵向综合控制等目标,还需要考虑更多环境信息和不确定干扰等影响因素。面对更全面的系统设计和更智能的控制的要求,需要探索如何运用高效精确的智能计算技术以实现系统的快速准确地响应,如:深度学习和强化学习等。
3.3 车联网大交通环境下智能驾驶控制技术变革
近年互联网通信技术的发展带来了车联网技术的进步,将促进碰撞预警、车辆诊断、道路检测和交通管理规划等技术的变革。未来车联网技术的进一步深层发展,建设智慧型、立体型和便捷型的智慧交通网络,并实现人-车-路的高效协同交互控制。为实现这现代化的交通设计目标,对于智能驾驶运动控制研究既是动力也是挑战。
4 总结
智能驾驶技术的不断提升会给工业带来革命式的发展,将会对人们的生活和社会的经济等产生重要的影响。纵向运动控制以及整个运动控制技术作为智能驾驶的核心,未来必定是科学研究和产业发展的重点。本文主要从直接式控制和分层式控制介绍了近十年来纵向控制技术的研究状况。再展望未来该领域的研究方向分别是从解耦研究向耦合研究发展,人工智能技术将促进控制技术的研究和车联网大交通环境下的智能控制技术的变革。
[1] 贺汉根,孙振平,徐昕.智能交通条件下车辆自主驾驶技术展望[J].中国科学基金, 2016,30(02):106-111.
[2] Shladover S E, Desoer C A, Hedrick J K, et al. Automated vehicle control develop-ments in the PATH program[J]. IEEE Transactions on Vehicular Technology, 2002, 40(1):114-130.
[3] 陈慧岩,熊光明,龚建伟,姜岩.无人驾驶汽车概论[M].北京:北京理工大学出版社, 2014, 163.
[4] 郭景华,李克强,罗禹贡.智能车辆运动控制研究综述[J].汽车安全与节能报,2016,7(02):151-159.
[5] Hoyong Kim. An intelligent control of vehicle dynamic systems by artificial neural network[D]. North Carolina State University, 1994.
[6] Chris Urmson, Joshua Anhalt, Drew Bagnell, Christopher. Autono -mous driv-ing in urban environments:Boss and the Urban Challenge [J]. Journal of Field Robotics,2008,25(8):425-466.
[7] Yi K, Hong J, Kwon Y D. A vehicle con-trol algorithm for stop- and-go cruise con-trol[C]//Intelligent Transportation Sys-tems, 2001. Proceedings. IEEE Xplore, 2001:478-482.
[8] Sezer V, Ercan Z, Heceoglu H, et al. A new fuzzy speed control strategy consi-dering lateral vehicle dynamics[C]// Inter-national IEEE Conference on Intelli-gent Transportation Systems. IEEE, 2012:19-24.
[9] Jullierme E, Guilherme A, Reinaldo M. Longitudinal model identification and velocity control of an autonomous car [J]. IEEE Trans Intellectgent Transposition Syst, 2015, 16(2): 777-786.
[10] Hakgo K, Dongwook K, Insoo S, et al. Time-varying parameter adaptive vehicle speed control [J]. IEEE Trans Vehicle Technology, 2015, 65(2): 581-588.
[11] Liu K, Gong J, Kurt A, et al. A model predictive-based approach for longi-tudinal control in autonomous driving with lateral interrup -tions[C]// Intelligent Vehicles Symposium. IEEE, 2017:359-364.
[12] Raffin A, Taragna M, Giorelli M.Adaptive longitudinal control of an autonomous ve-hicle with an approximate knowledge of its para -meters[C]// International Work-shop on Robot Motion and Control. IEEE, 2017:1-6.
[13] 李贻斌,阮久宏,李彩虹,付梦印.智能车辆的纵向运动控制[J].机械工程学报,2006(11):94-102.
[14] 宾洋,李克强,冯能莲.车辆全速巡航系统的干扰解耦鲁棒控制 [J] .中国科学(E 辑:技术科学), 2009, 29(12):1963-1982.
[15] 任殿波,张策,张继业.考虑前后信息的车辆跟随自适应控制[J].哈尔滨工业大学学报,2011,43(06):76-80.
[16] 崔明月,孙棣华,李永福,廖孝勇.基于滤波反演法的参数不确定自动引导车的运动控制[J].控制与决策,2013,28(08): 1200-1206.
[17] 郭景华,李琳辉,胡平,等.基于模糊逻辑的无人驾驶车纵向多滑模控制[J].中国公路学报, 2013, 26(1):170-176.
[18] 姜岩,龚建伟,熊光明,等.基于运动微分约束的无人车辆纵横向协同规划算法的研究[J]. 自动化学报, 2013, 39(12):2012-2020.
[19] Li S E, Gao F, Li K, et al. Robust Longi-tudinal Control of Multi- Vehicle Systems-A Distributed H-Infinity Method[J].IEEE Transac -tions on Intelligent Trans-portation Systems, 2017, PP(99):1-10.
[20] 高嵩,吕军锋,陈超波,等.基于反馈线性化的车辆速度滑模控制方法[J].计算机仿真, 2017,34(6):135-138.
[21] Huang Z, Xu X, He H, et al. Paramete-rized Batch Reinforcement Learning for Longitudinal Control of Autonomous Land Vehicles[J]. IEEE Transactions on Systems Man & Cybernetics Systems, 2017, PP(99):1-12.
[22] YAMAMURA,Y.Development of an Adaptive Cruise Control Syst -em with Stop-and-Go Capability[J]. SAE Technical Paper, 2001, 13 (5):598-601.
[23] Canale M, Malan S. Tuning of Stop and Go driving control strateg -ies using driver behaviour analysis[C]// Intelligent Vehicle Sympo -sium. IEEE, 2002:407-412.
[24] Venhovens P, Naav K, Adiprasito B. STOP AND GO CRUISE CONTROL[J].International Journal of Automotive Technology, 2000,1(2):1317-1324.
[25] Zhang L, Wang J, Yang F, et al. A quantification method of driver characteristics based on Driver Behavior Questionnaire[C]// Intel -ligent Vehicles Symposium. IEEE, 2009:616-620.
[26] Lu X Y, Hedrick J K. Longitudinal control design and experiment for heavy-duty trucks[C]// American Control Conference, 2003. Proceedings of the IEEE Xplore, 2003:36-41.
[27] Omae M. Study on the vehicle platoon control system [D]. Tokyo: University of Tokyo, 1999.
[28] Liang H, Chong K T, No T S, et al. Ve-hicle longitudinal brake cont rol using variable parameter sliding control [J]. Control Engineer -ing Practice, 2003, 11(4): 403-411.
[29] Liang H, Chong K. Variable parameter sliding controller design for vehicle brake with wheel slip[J]. Journal of Mechanical Science and Technology, 2006, 20 (11):1801-1812.
[30] J.C. Gerdes, J.K. Hedrick. Vehicle speed and spacing control via coordinated throttle and brake actuation[J].Control Engineering Practice,1997,5(11):1607-1614.
[31] Nouveliere L, Mammar S. Experimental vehicle longitudinal control using a second order sliding mode technique [J]. Control Engineering Practice, 2007, 15(8):943-954.
[32] Gao F, Wang J Q, Li K. Hierarchical Switching Control of Longitu -dinal Acceleration With Large Uncertain-ties[C]// IEEE Internati -onal Conference on Vehicular Electronics and Safety. IEEE, 2007: 270-275.
[33] 侯德藻.汽车纵向主动避撞系统的研究[D].清华大学,2004.
[34] 侯德藻,高锋,李克强,等.基于模型匹配方法的汽车主动避撞下位控制系统[J].汽车工程, 2003, 25(4):399-402.
[35] 高锋,李家文,李克强.大模型不确定性下的汽车纵向加速度控制[J].中国机械工程, 2007, 18(4):495-499.
[36] Zhu Qi, Dai Bin, Huang Z, et al. An adaptive longitudinal control method for autonomous follow driving based on neural dynamic programming and internal model structure[J] International Journal of Advanced Robotic Systems. 2017, DOI: 10.1177/1729881417740711.
[37] Guo J, Luo Y, Li K, et al. A novel fuzzy-sliding automatic speed control of intelli-gent vehicles with adaptive boundary layer[J]. International Journal of Vehicle Design, 2017, 73(4):300.
[38] Liu J, Jayakumar P, Stein J, et al. Combined Speed and Steering Control in High Speed Autonomous Ground Vehicles for Obstacle Avoidance Using Model Predictive Control[J]. IEEE Transactions on Vehicular Technology, 2017, PP(99):1-1.
Review on the research of longitudinal motion control for intelligent driving vehicles
Luo Yufeng, Zhongchen Zhipeng, Chen Qiping, Wei Jiacheng, Su Xiao
( School of Mechatronics & Vehicle Engineering, East China Jiaotong University, Jiangxi Nanchang 330013 )
This paper discusses the status research of the intelligent driving theory method and technology application of longitudinal motion control to promote the following performance of intelligent drive path, through the analysis the status research of the direct control and hierarchical control of intelligent driving longitudinal control at home and abroad. The current research mainly applying the decoupling motion control system to study the longitudinal control separately, There are some shortcomings, such as monotonous modern, limited computing method and designing without uncombined internet of Vehicles technology. Therefore, the research direction of longitudinal control will be combining internet of Vehicles wireless communication technology, artificial intelligence technology and control coupling research to have a fast and safe response of intelligent driving longitudinal control driving performance.
intelligent driving; longitudinal motion control; direct control; hierarchical control
A
1671-7988(2018)22-28-05
U461.99
A
1671-7988(2018)22-28-05
U461.99
罗玉峰,就职于华东交通大学,教授,博士,主要研究方向机械系统与机器人技术、交叉学科中的人工智能、高等教育等。钟陈志鹏,华东交通大学,硕士生,硕士,主要研究方向电动汽车及智能化。陈齐平,就职于华东交通大学,副教授,博士,主要研究方向为电动汽车及智能化。魏佳成,华东交通大学,硕士生,硕士,主要研究方向为电动汽车及智能化。苏校,华东交通大学,硕士生,硕士,主要研究方向为车辆减振系统、电动汽车及智能化。
10.16638/j.cnki.1671-7988.2018.22.010
