四轴旋翼飞行器系统的设计
2018-12-06西安石油大学贾覃溶钊杜雨欣王晓倩韩楚赢
西安石油大学 刘 丽 颜 瑾 贾覃溶钊 杜雨欣 郝 杰 王晓倩 韩楚赢
本文设计了一种微小型的四轴旋翼飞行器方案。在硬件方面,使用STM32芯片作为主控CPU,在无线通信方式上,选择NRF24L01和蓝牙。在控制算法上采用了经典的PID算法,结合平衡补偿实现了飞行器的稳定飞行。
1.系统总体框图
四旋翼飞行器(邓矛.关于四轴飞行器的姿态动力学建模[J].科技创新导报.2012(9):256-256.)机动灵活,成本低廉,安全可控。另外,短距离的无线通信技术迅速普及,在四旋翼飞行器中嵌入蓝牙、Zigbee、NRF24L01等无线通信模块,不仅可以直接接收飞行数据和航拍数据,还可以遥控引导飞行器。
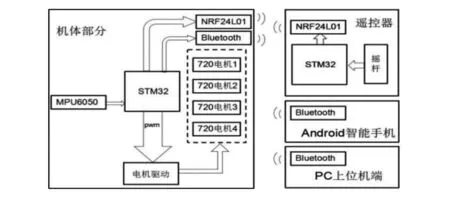
图1-1 四轴旋翼飞行器总体系统框图
2.部分硬件模块设计
在四轴飞行器系统中,通常包括测量飞机运动信息的各种传感器,如陀螺仪、加速度计、高度表等。也包括控制飞行器运动的控制计算机和电传设备等(唐懋.基于Arduino兼容的Stm32单片机的四旋翼飞行器设计[D].厦门大学,硕士论文, 2014.)。本设计主要研究的是四轴飞行器遥控系统的实现方法,固在传感器上仅使用到最基本的陀螺仪和加速度计作为机载传感器。而在通信方式上选择了NRF24L01与Bluetooth同时兼容的办法。
2.1 CPU选型
CPU是整个系统的核心器件,四轴飞行器的姿态解算、数据收发、电机控制等运算都由CPU来完成。固CPU的选型对整个系统的性能有着至关重要的影响。

表1 .1 常用CPU性能比较
STM32F103T8U6为3.3V供电,共有24个IO口。芯片内含2个ADC模块共有18路ADC接口、含有一个硬件SPI接口和一个硬件I2C接口、一个USART接口、带四路通道的定时器两个,符合本设计功能要求。
2.2 无线模块的选型
本设计采用NRF24L01和Bluetooth对四轴旋翼飞行器进行无线遥控。由于当前大部分手机和电脑都带有蓝牙功能,固采用Bluetooth与PC端上位机交流,同时接收Android端的控制信号。
3.PID控制算法
四旋翼飞行器的控制主要包括姿态控制和位置控制,位置的改变是由姿态的变化而引起的,所以控制四旋翼飞行器的姿态是很重要的。为了实现对四旋翼飞行器的姿态控制,通常情况下采用的是比较成熟的PID控制(张镭,李浩.四旋翼飞行器模糊PID姿态控制[J].计算机仿真, 2014, 31(8):73-77.)。
PID算法是一种闭环的最优控制算法,在控制过程中需要从控制对象获得反馈信号。由给定信号r(t )与反馈信号c(t )之差得到偏差e(t ),通过比例环节、积分环节和微分环节的计算得到对控制对象的输出值。PID控制算法原理如图3-1所示。
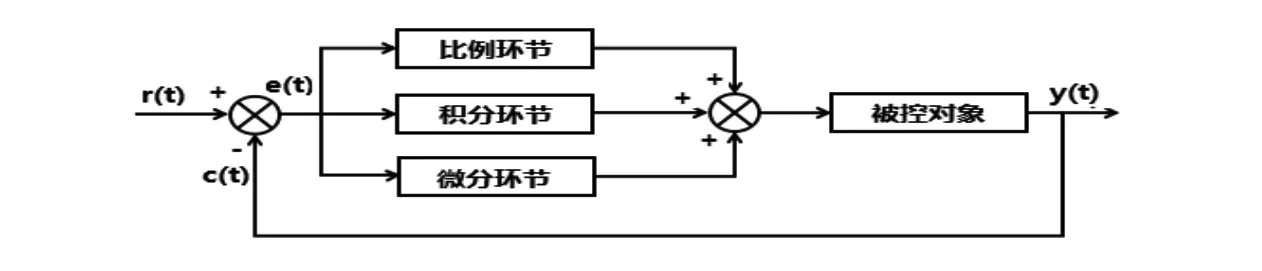
图3-1 PID控制原理
在该设计中,分别设计了三组相互独立的PID算法,以俯仰角、滚转角、自旋角为控制变量。其中给定量为飞行器从遥控器接收到的期望角度,反馈量即为通过姿态解算得到的姿态角,两者之差即为偏差e,对偏差e进行PID运算,三组PID输出分别为俯仰角叠加量、滚转角叠加量、自旋角叠加量。将以上三个叠加量与遥控器发送来的油门信号叠加量进行叠加,得到四旋翼飞行器四个电机的PWM输入值。
4.机体平衡补偿
该飞控为开源板(杨阳,储祝颖.基于APM开源飞控平台的四轴旋翼飞行器[J].信息通信,2015.),机体搭载了电池、传感器等设备,使得飞行器质量分布不均匀。起飞时,可能导致起飞时机体不稳,产生震荡,严重时甚至会导致坠机。因此可以根据飞行器的质量分布,利用PWM对电机直接进行平衡补偿。即将飞行器放置在水平地面上,逐渐加大油门,观察飞行器起飞时偏移的方向,机体偏移的方向便是质量分布较重的方向,则对该方向上的电机进行一定量的PWM补偿,如此往复测试几次,便可以达到较好的补偿效果。经过试飞测试,平衡补偿在应用中起到了很好的效果。

图4-1 未加补偿的飞行姿态

图4-2 加入补偿的飞行姿态
图4-1和图4-2都是在PC端上位机对飞行器姿态进行的监测图,其中红色线条表示俯仰角,蓝色线条表示滚转角。如图4-1所示,未加入平衡补偿时,可以观察到飞行器起飞时滚转角的方向有明显的抖动,这种抖动的安全隐患极大,应该及时消除。图4-2中为加入平衡补偿后的姿态监测,此时飞行器起飞平稳,没有抖动。此外,在4-2图中都能看到,图像的尾部出现了抖动,这是微小型四旋翼飞行器在降落的过程中,接触地面时发生的抖动,由于这时电机已经处于关闭状态,所以不会造成安全隐患。
5.总结
该设计的无人机使用的是简单的PID控制方法,控制能力有限,控制效果还有待于提高。
