小数偏差产品质量评估及固定性能分析
2018-12-06张钰玺张小红
张钰玺,张小红,朱 锋
(武汉大学测绘学院,武汉 430079)
0 引 言
精密单点定位(Precise point positioning, PPP)技术自1997年提出以来经过不断发展已经被广泛应用于诸多领域[1]。但由于PPP采用非差模型导致模糊度失去整数特性,使得其精度和可靠性仍不及相对定位。因此,要提高PPP定位的精度和可靠性,必须固定非差相位模糊度[2-3]。1999年Gabor等[4]率先提出通过改正卫星端宽巷和窄巷小数偏差,固定星间单差模糊度的方法,但受限于当时卫星轨道和钟差的精度,其结果并不理想。直到2008年,Ge等[5]采用星间单差法,利用IGS的跟踪站网的数据估计卫星端星间单差的相位小数偏差,率先实现了PPP固定解。随后,2009年Laurichese等[6]提出利用卫星钟差吸收卫星端小数偏差的相位整数钟法(Integer-recovery clock, IRC),2010年Collins等[7]提出分别估计伪距和相位卫星钟恢复模糊度的整数特性的钟差去耦法,均可实现PPP的模糊度固定。上述三种方法是目前常用的PPP模糊度固定方法,已有学者证明了这三种方法的等价性[8-9]。目前仅有法国CNES分析中心和武汉大学测绘学院(School of geodesy and geomatics, SGG)对外公开发布用于GPS系统PPP模糊度固定的卫星产品。CNES于2010年5月20日正式成为IGS分析中心,它从2007年开始参与解算并首次对外提供用于PPP固定解的精密轨道、宽巷小数偏差整数钟差产品[10]。武汉大学相关学者在Ge星间单差的方法上进行了改进[11],于 2015年1月1日起开始对外发布与多个分析中心精密轨道和钟差兼容的小数偏差(Fractional cycle bias, FCB)改正数产品(以下简称SGG FCB产品)。虽然已有不少文献研究PPP的固定解,但对上述两种用于PPP固定解的小数偏差产品的比较还鲜有研究。本文拟对这两种公开发布的产品的数据质量及其PPP的固定效果进行对比分析研究,以期为PPP用户今后使用这些产品进行PPP固定解的实际应用提供参考。
本文首先比较了SGG FCB产品和CNES相位整数钟产品宽巷、窄巷小数偏差改正数的数值特性,然后使用这两种小数偏差产品分别实现基于FCBs的星间单差方法(以下简称FCB)和整数钟方法(以下简称IRC)两种PPP模糊度固定算法,使用大量实测静态和一组机载动态数据比较分析了两种产品的静态和动态PPP的固定效果。
1 PPP模糊度固定方法
1.1 PPP模糊度固定原理
传统PPP无电离层组合模型为:
(1)
(2)

(3)
式(3)表明实际估计的模糊度包括伪距和载波相位硬件延迟的影响而不再具有整数特性,这是传统PPP只能得到浮点解的主要原因。基于前文提到的星间单差法或整数钟方法,利用IGS跟踪站的观测数据精确估计卫星端的相位小数偏差并播发给PPP用户,用户利用该产品改正相位观测值就可以恢复PPP模糊度的整数特性。最后利用无电离层组合并结合波长较长的宽巷组合可实现PPP模糊度固定。
1.2 两种小数偏差产品的固定策略
用户端进行PPP模糊度的具体流程如图1所示。进行PPP模糊度固定的前提是获得PPP浮点解。由图1可知,整数钟差产品既作为小数偏差产品用于PPP模糊度固定,同时又作为精密产品参与PPP浮点解解算;FCB产品可以与不同分析中心的精密产品配合使用,仅用于PPP模糊度固定。
得到PPP浮点解结果后,通常采用星间单差的形式进行模糊度固定,一方面是为了消除接收端硬件延迟引起的小数偏差,另一方面是使用相位整数钟产品时可以避免估计两个钟差参数[12]。式(4)表示无电离层组合浮点解模糊度可以转化为宽巷模糊度和窄巷模糊度的组合:
(4)
上标表示进行星间单差的卫星。宽巷模糊度由经过星间单差后的MW组合观测值得到:
(5)

消除了卫星端各类硬件延迟偏差的影响之后使用LAMBDA方法即可完成窄巷模糊度固定。最后利用固定后的模糊度参数即可更新得到PPP固定解。
2 两种小数偏差产品的质量分析
从武汉大学FCB产品服务器和CNES分析中心获取2016年全年的SGG FCB产品和CNES相位整数钟产品。由于服务端生成固定解产品时引入了不同的基准,因此比较时需要先在产品内部做一次星间单差,之后使用星间单差值进行比较分析。
SGG FCB的宽巷小数偏差产品和CNES宽巷产品的值域不同,前者为-0.5~0.5周,后者为0~1周,这会造成实际统计时部分卫星的互差结果出现接近-1和1的情况,由于宽巷FCB的整周偏差不影响用户端PPP模糊度固定,因此可以在统计时人为修正这个常数偏差。图2为SGG FCB与CNES宽巷产品的差值统计直方图,两者互差值均值为0.0067周,方差为0.0296周,从统计值上表明互差值稳定在0附近。实际互差值大致服从正态分布,95.41%的偏差处于±0.05周以内,仅有1.6%的互差值不在3倍样本标准范围内,这说明两个宽巷产品具有很高的符合度。统计实际数据时发现全年的CNES宽巷产品中出现了96次卫星缺失(不包括G04卫星)的情况,其原因是CNES发布的卫星精密钟差产品没有对这些卫星进行钟差估计,但在SGG FCB宽巷产品中可以找到这些缺失卫星的偏差改正,这说明SGG FCB产品的完整度更高。
统计两套产品的窄巷小数偏差互差值结果如图3所示,96.82%的偏差落在±0.075周以内,有1.2%的互差值大于3倍样本标准差,以上说明SGG FCB和CNES窄巷产品具有很高的互符合度。比较宽巷和窄巷互差值的统计图可以发现宽巷的互符合度更好,这是由于卫星端宽巷的小数偏差变化很小,具有长期稳定性更有利于估计[13],而窄巷模糊度波长较短,且容易受到未模型化误差的影响,不利于窄巷小数偏差的估计。
3 实测数据固定效果对比
3.1 静态结果对比
选择2015年7月22日全球均匀分布的35个IGS测站观测数据,数据采样间隔为30 s。分别使用SGG FCB产品和CNES整数钟差产品进行静态模式下的PPP浮点解和模糊度固定解算。PPP参数估计方式为卡尔曼滤波,伪距噪声和相位噪声分别设置为0.3 m和0.003 m。
将全天的数据每隔1小时进行分段,共得到840段静态数据。本文将模糊度正确固定定义为完成PPP模糊度固定并通过模糊度核检策略,得到PPP固定解,且三维位置误差不超过PPP浮点解收敛时的精度(静态数据认为平面和高程方向均小于1 dm[14],动态数据认为平面精度不超过1 dm,高程不超过2 dm[15]),且模糊度固定后的位置误差优于浮点解。静态解算结果的固定率定义为正确固定的时段数目占总时段数的比例。
图4统计了不同时长解算结果的模糊度固定率,可以看出其随着观测时段长度的增加,模糊度固定率逐渐增大,30 min固定率可以达到90%左右,60 min固定率超过95%。30 min之前SGG FCB产品的固定率要高于CNES分析中心,之后不同时段长度下两种小数偏差产品的固定率都比较接近。本文统计了数据长度为一个小时的固定解精度,使用SGG FCB产品的位置精度为(0.49, 0.67,1.89) cm,而使用CNES产品的位置精度为(0.47,0.70,1.85) cm,相较于浮点解的位置精度(2.78,1.28,2.91) cm均有明显的改善,应用这两种产品进行PPP模糊度固定后的位置精度差异仅为(0.02,0.03,0.04) cm。以上说明两种产品静态解算可以明显改善位置精度,且固定效果基本一致。
3.2 静态数据模拟动态结果对比
对上述35个测站模拟动态解算,图5统计各个测站一个小时内首次固定之后东方向固定解位置精度的改善比例,表1为浮点PPP、使用两种小数偏差产品做PPP固定解的结果对比。首次固定时间定义为模糊度首次正确固定的时刻,且之后10个历元连续固定正确。正确固定率定义为从首次固定时间开始,PPP模糊度正确固定的历元数目占之后所有历元总数的比例。动态PPP浮点解和固定解的位置误差统计均从首次固定历元开始。从表1的统计结果分析可知,使用SGG FCB产品和CNES产品进行PPP模糊度固定,得到的PPP固定解的首次固定时间(Time to first fixed, TTFF)分别为23.36 min和23.58 min,而PPP浮点解的收敛时间为29.23 min,模糊度首次固定时可以快速得到厘米级精度的位置定位结果,进而有效缩短PPP的收敛时间。PPP模糊度首次固定后的位置精度均有显著提高,两种小数偏差产品的位置误差由浮点解的(0.08,0.054,0.095) m降低至(0.023,0.025,0.047) m和(0.021,0.026,0.048) m。统计图5结果可以得到应用两种产品固定后东方向的位置精度改善比例,在全球范围内各个测站东方向定位精度均有明显提高,统计结果可以得到两种产品的平均改善比例分别可以达到71.32%和71.21%。SGG FCB和CNES两种产品前1小时解算模糊正确固定率可以达到92.37%和92.14%,动态结果的正确固定率略低于静态结果。以上结果反映两种产品本身的数据质量良好,固定效果稳定。
从统计结果可以看出,两种产品固定解结果的差异很小,位置误差的差异仅有(0.13, 0.02, 0.07) cm。从图5可以看出,在全球范围内绝大部分测站东方向位置精度的改善比例基本相同,有个别分布在高纬度地区的测站存在差异,其主要原因是解算中这部分测站两种产品首次固定时间不完全一致。各个测站固定结果的平均收敛时间和固定率也非常接近,表明在全球范围内SGG FCB产品和CNES的整数钟产品固定效果基本一致。
为了进一步比较两种小数偏差产品在较长时间上的差异,随机选取COCO测站,解算得到2016年全年每天前一小时的固定解,其东向、北向、天向(E、N、U)三个方向的位置精度差异如图6所示,绝大部分保持在0附近,且互差的RMS为(0.39,0.34,0.44) cm,这说明在长时间内两种小数偏差产品的固定效果非常接近。
3.3 机载动态数据结果对比
本文采用一组实测机载动态数据,分别利用SGGFCB产品和CNES产品进行PPP模糊度固定。
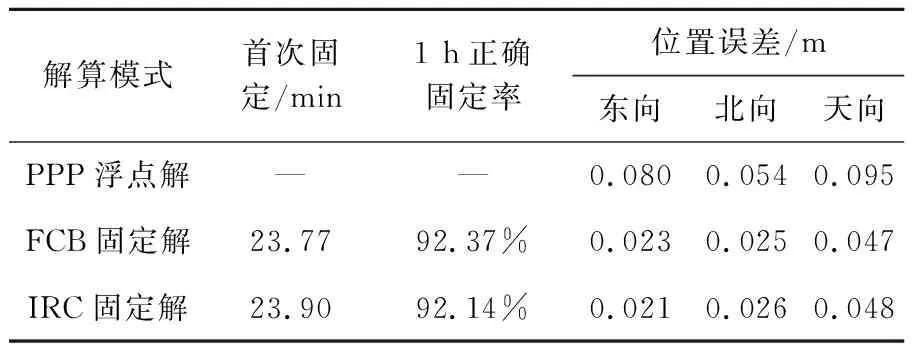
表1 35个测站浮点解和固定解PPP位置精度及相关信息统计Table 1 Statistics of ambiguity-float and ambiguity-fixed PPP positioning bias and related information
数据采集于2015年6月8日鄂尔多斯市,使用设备为Novatel SPAN,数据采样间隔为1 s,总时长约为4个小时。图7是该组机载数据实测轨迹图,从图8统计得到的GPS卫星数、PDOP值和双差模糊度的固定情况可以看出数据观测质量良好。
以高精度商用软件IE处理的差分结果作为参考真值,将浮点解和固定解的位置结果分别与参考真值对比,得到位置误差的序列如图9所示,表2统计了首次固定时间、历元正确固定率以及首次固定后ENU方向上的位置误差。结果表明,在开放环境下应用SGG FCB和CNES整数钟产品可以显著提高动态数据的定位精度,PPP模糊固定后位置精度可以达到(0.017, 0.020, 0.047) m和(0.013, 0.015,0.054) m,平面可以取得2~3 cm的定位精度,高程方向也可以达到5 cm,东方向上的改善尤其明显,位置精度的改善比例可以达到80%和85%。使用这两种产品,动态PPP结果在67.57 min和67.92 min完成首次固定,从图9可以看出,首次固定后ENU位置误差数值上非常接近,东、北方向可以达到厘米级,并且首次固定后模糊度固定后的平面位置偏差一直稳定在较高精度,说明两种产品对于收敛速度的改善一致。两种产品动态条件下的模糊度成功固定率不及静态数据,但是仍然都可以达到90%左右,且FCB产品的正确固定率与CNES整数钟产品十分接近。整体上看两种产品的数据质量良好,固定效果基本一致。
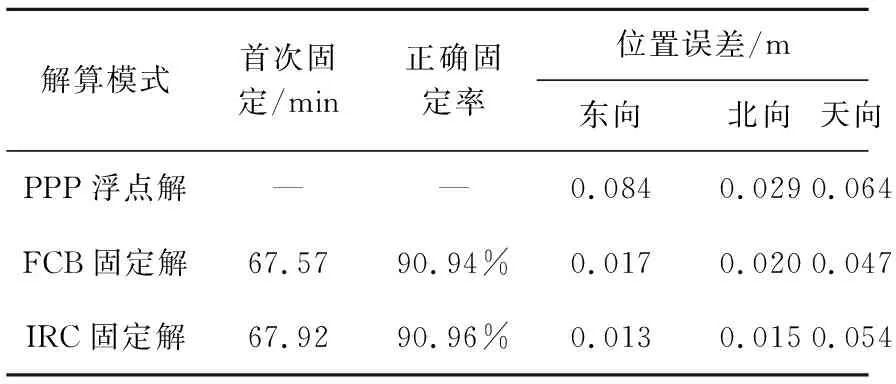
解算模式首次固定/min正确固定率位置误差/m东向北向天向PPP浮点解——0.0840.0290.064FCB固定解67.5790.94%0.0170.0200.047IRC固定解67.9290.96%0.0130.0150.054
4 结 论
本文主要介绍了SGG FCB卫星端小数偏差产品和CNES相位整数钟产品,实现了相应的PPP模糊度固定算法,使用实际数据对两者的产品互符合度以及模糊度固定效果进行了比较分析。结果表明,两种PPP模糊度固定产品具有很高的互符合度,有99.4%宽巷小数偏差改正数的差异处于三倍标准差的范围内,99.8%窄巷小数偏差改正数的差异不超过三倍标准差,且SGG FCB产品有效避免了卫星信息缺失具有更高的数据完整性。使用实测静态、动态数据表明利用这两种产品均可明显改善PPP的位置精度。静态模式下两种产品的固定解平面位置精度可以达到1~2 cm,高程方向也可以达到厘米级,SGG FCB小数偏差产品短时间内的固定率高于CNES相位整数钟产品。静态模拟动态的位置精度差异小于5 mm,1小时产品成功固定率可以达到92.37%和92.14%,首次固定时间基本相同。机载数据两种产品取得的固定解位置结果可以达到2~3 cm的平面定位精度,高程方向也可以达到5 cm,成功固定率为90.94%和90.96%,首次固定时间均在67分钟左右,总体表明了两种模糊固定的小数偏差产品在实际固定效果上的一致性。