ABB主立井提升机电气控制系统结构的研究
2018-12-05秦爱玲
秦爱玲
(同煤浙能麻家梁煤业有限责任公司,山西 朔州 036002)
立井提升机是立井提升煤矿中重要的设备之一,主要用于原煤、物料的提升以及人员和设备的升降。提升机安全高效的运行集中体现在提升机的电控系统中,电控系统的优劣直接影响矿井生产效率以及人员的人身生命安全。因此,ABB立井提升电控系统的选型、设计都以系统的高度安全性和可靠性为准。本文主要结合麻家梁矿主井提升系统采用瑞典ABB公司生产的全套JKMD—5.7×4落地式摩擦式提升机,对提升机自动化控制系统进行研究分析,期待从中发现科学、合理、可靠的提升机自动化控制系统的设计理念以及应用方法。
1 ABB提升系统配置
ABB主控系统软件用来执行提升机运行的逻辑、比较、顺序控制、算术计算、通讯和监测保护功能,由AC800M PLC系统、S800 I/O系统组成,ACS6000传动控制系统主要实现速度、电流闭环控制功能及与传动有关的监测监控保护功能。传动控制系统包括驱动控制、电流控制和励磁控制三部分,主要由高压柜、变压器、两套逆变单元(INU)、两套整流单元(ARU)、电容器单元(CBU)、电压限副单元(VLU)、励磁单元(EXU)、内外水冷单元(WCU)组成。监控系统对提升机系统的速度、位置等进行监测和计算,起到驱动系统和主控系统的后备保护功能,监控系统的位置速度信号来自电机增量型侧编码器脉冲解算信号。ABB闸控系统与ABB提升系统集成,有恒减速制动和恒力矩制动两种紧急制动功能,在紧急制动投入时,率先投入恒减速制动,具有优越的安全制动功能。操作维护系统主要由选择开关、按钮、光字牌、深度指示器、显示仪表、蜂鸣器、制动手柄和速度控制手柄组成。提升监视系统提供直观的用户界面,可以对提升系统的实时数据监视以及系统维护。井筒信号系统主要包含装载站和卸载站信号控制系统。
2 ABB提升系统的控制功能
2.1 设备起停、分合及提升机位置速度测量功能
包括变流器、高压开关的合分闸以及外围设备的起停,电机风机、传动水冷系统等。ABB提升机位置速度测量采用安装在电机侧和滚筒侧的增量型编码器来检测,通过对编码器脉冲信号,到DP820模块,然后经过PLC程序逻辑计算。
2.2 滚筒直径功能
滚筒直径是影响提升机位置及速度计算的一个极为重要的参数,由于绳衬不断磨损发生变化,产生误差,必须要不断修正它,才能保证控制的正确性,在CPU复位前必须记下滚筒直径,以便在复位后重置直径。
2.3 提升机同步及井筒开关功能
所有的位置、速度、滚筒的直径计算所需的数据来源都是程序中的脉冲计数模块,因此脉冲计数模块的正确性是提升机正确、准确、安全运行的保证,为了消除其在提升过程中的偏差,必须要求对其进行同步校正。在提升机的整个运行阶段中:起步-爬行-匀加速-匀速-匀减速-爬行-低爬-停车制动,匀减速段至停车段是提升速度控制的关键部分,因此,井筒传感器均安装在该阶段对应的井筒当中:减速点开关(-106m),同步开关(-5.6m),到位开关(+0m)。
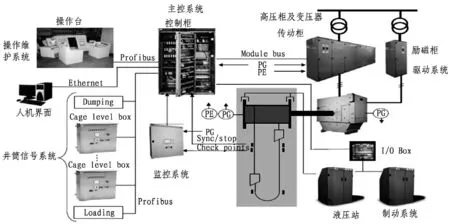
图1 ABB提升系统组成示意图
3 ABB提升控制系统的安全原则及保护功能
3.1 安全原则
ABB提升机控制系统符合欧盟的EN954-1标准,从系统设计、选型等方面都以欧盟的EN954-1为参考标准。提升机控制系统在设计时采用著名的安全设计原则来减少提升机系统的风险。
3.2 可编程序控制器
ABB的高性能PLC系统采用主控AHC和监控AHM两套完全独立的PLC控制系统,其中,AHC用来对提升机进行监视和控制,而AHM仅仅用来对提升监视。两个PLC都有Watch-dog来监视PLC工作状态,2套控制器都有独立的跳闸输出,对于重要的过程变量,2个控制器还对其进行比较,如果其偏差超过一定的范围,使安全回路跳闸。处理器模块:PM856/PM861,48MHz,系统读写存储器:8Mbyte最小任务周期:1ms,I/O模块: S800 I/O,通讯接口 /协议 : Ethernet,Profibus-DP,TCP/IP,内置电池后备时间:>48h。
3.3 提升机的速度和位置的确定
提升机的位置和速度计算通过AHC和AHM二套完全独立的控制器,AHC主控系统读取滚筒侧轴端增量型脉冲编码脉冲信号(10000ppr),AHM监控系统读取电机侧轴端增量型脉冲编码脉冲信号(10000ppr),连接到各自的脉冲量计数卡,并且在井筒设计了同步开关,对提升机位置进行同步,还设置了位置检查开关,保证提升机的位置和速度的准确性。
3.4 安全回路保护
分为硬件安全回路和安全回路,并以硬件安全回路为主,两者之间相互作用,传动系统、监控系统、制动系统、装卸载系统、信号系统及控制系统关键状态信号等,有让安全回路投入的要求时,控制系统的软件安全回路就会动作跳闸,同时向硬件安全回路发出跳闸命令;与此同时,上述触发信号也会断开硬件安全回路,进而触发安全制动。硬件安全回路为最后的安全保护部分,其设计遵循失电断开、上电闭合的原则,最大限度确保任一异常状况下安全回路均能动作跳闸,保证提升机安全可靠运行。
3.5 安全制动保护
系统设计有安全制动回路,当发生紧急制动时,制动器内的油通过两条回路迅速回油,很快使油压降到V37的控制压力,这时V37通过闸控卡控制其压力,实现恒减速紧急制动,当恒减速失败时直接转至恒力矩制动。闸控板设计有后备电池,即使在电源中断的情况下,也能启动设定的安全制动模式。
3.6 ABB提升机控制系统的故障等级划分
ABB提升机控制系统设计了多种保护功能,根据故障对提升机系统的影响程度,提升机保护功能将故障为三类。报警故障是指系统监视中出现的一些些故障,比如主变压器温度高、天轮/主轴承温度高等,该类故障不会直接危害系统的正常运行,并不需要中断提升,仅发出声光报警,告知操作人员及检修人员故障信息,选择适当的时机处理即可。电气减速紧停故障是指在一定程度上会危及到提升机的正常运行,但是又不会立即造成较大的事故,比如主轴承温度超过75℃,液压站蓄能器氮气压力过低,此时,提升机将先电气减速至爬行速度,随后再紧急停车制动。急停故障:一类是立即引起紧急制动的故障,另一类是提升机停车后再产生紧停的故障。第一类紧停故障出现后,提升机系统会立即停车,否则可能会给整个系统造成重大危害。第二类急停故障出现后,不会立即造成重大事故或危害,可以完成本次提升,但是停车后,必须排除该类故障后才能继续提升。根据提升机不同操作功能的划分,主控系统的保护功能可分为如下几部分:高压保护低压保护、速度保护、位置测量保护、温度保护、运行的同步保护、辅助设备状态保护、张力测量保护、过卷保护、井筒设备的状态保护、液压制动系统的保护、反转保护、其他保护等。
4 结语
提升机作为矿井的大型设备之一,其安全性对整个矿井的安全生产起着举足轻重的作用。本文结合ABB提升机电控系统进行了系统的设计分析,对提升机电控系统及其控制技术应用的研究有一定的参考价值。关于提升机自动化电控系统更先进、更成熟、更可靠的技术研究,还有赖于广大矿井科技工作者的共同努力,才能最终实现我国提升机自动化控制系统及其控制技术应用的提高。
