新型智能搬运小车系统设计
2018-12-05陈飞跃涂亚东殷华锋徐小兵
陈飞跃,涂亚东,殷华锋,杜 娇,徐小兵
(长江大学 机械工程学院,湖北 荆州 434020)
0 引言
仓储物流是指物件从进入仓库到被重新出库这一阶段的运动过程。现代“仓储”是在特定的场所、运用现代技术对物品的进出、库存、分拣、包装、配送及其信息进行有效的计划、执行和控制的物流活动。现阶段,仓储物件的搬运工具的环境适应性差,智能化水平较低,并且其搬运物件的灵活性不足;难以实现较复杂环境下的自动适应、灵活搬运的效用。因而如何实现快速、高效的物件搬运,成了制约物流行业发展的关键点。全方位智能化的仓储搬运小车,可有效提高货物仓储的流动性、灵活性。
本文研究的智能搬运小车以CMOS摄像头为路径识别传感器,以步进电机为小车驱动装置及转向装置。以一种新结构搬运小车为载体,可实现搬运小车的360°的转向、直角转弯、弧形转弯、自动避障等功能。且该小车可通过对自身运动速度和方向的调整达到“沿路线”安全快速行驶。
1 基本结构及原理
仓库及物件放置如图1所示。本搬运小车含有4个轮架机构和1个托板;轮架结构和功能均相同,托板即为搬运平台。图2为其整体结构图。
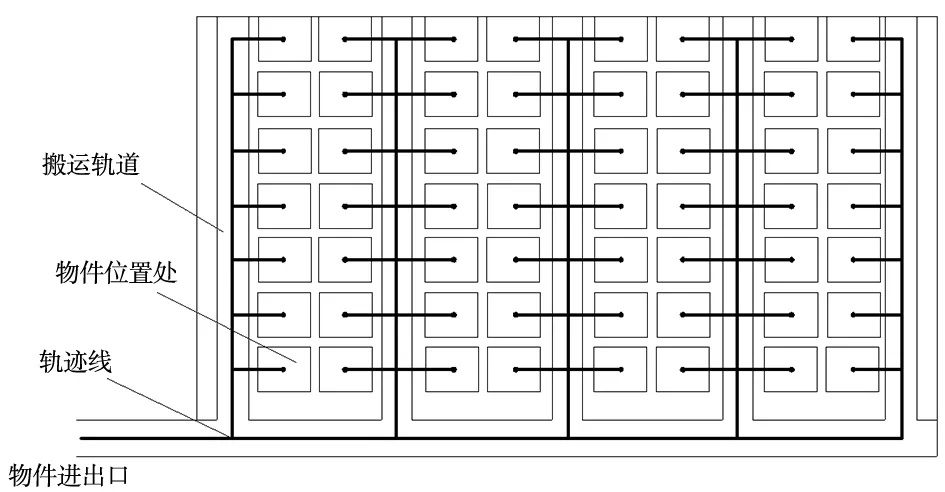
图1 仓储搬运轨迹图
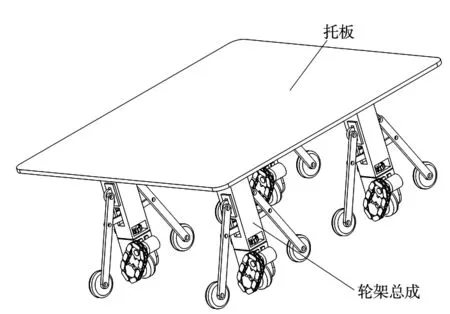
图2 整体结构图
图2中托板与轮架总成上端支撑托盘固联,CMOS摄像头位于托板中心下表面处。图3中底部转向运动机构由顶部转动柱、销孔、摩擦肩、驱动步进电机及链传动总成组成。其中转动柱与顶升机构内部的转向齿轮通过键连接;销孔用于保证顶升机构与底部转向运动机构的固联。图4中轮架由顶升机构、转向运动机构组成。
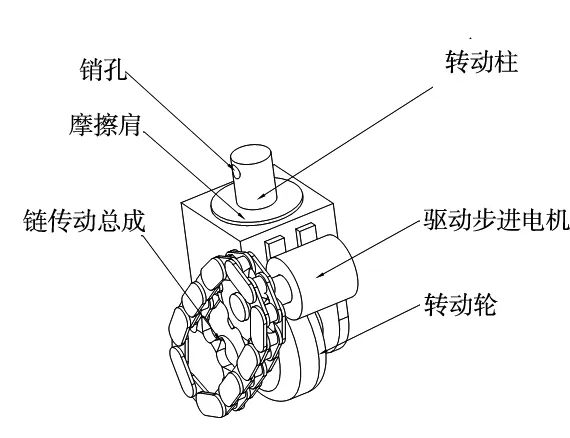
图3 底部转向运动结构图
物件搬运过程:初始状态,搬运小车于搬运进出口处,且其顶端托板处于初始位置,两侧滚轮处于张开状态(与地面无接触)。在搬运中,首先搬运小车以初始状态,由驱动步进电机驱动,使得搬运小车运动至载物搬运架的中间部位处停止;之后托板将载物搬运架向上抬起一定位置处(载物搬运架与地面分离一段距离)停止工作;接着驱动步进电机带动整体移动。当直角转弯时,小车停止运动,推动电推杆开始工作,使得摆动杆及其两端的滚轮将底部转向运动机构整体抬起;接着转向及CMOS摄像头步进电机开始工作,通过齿轮传动驱动底部转向运动机构及CMOS摄像头转动一定角度;之后推动电推杆收缩(回到初始状态);最后驱动步进电机开始工作,带动整体移动。当小车到达目的地时,支撑电推杆收缩(回到初始状态),将载物搬运架放置于目的地处,最后整体小车自动回到出发的位置处(初始位置)。
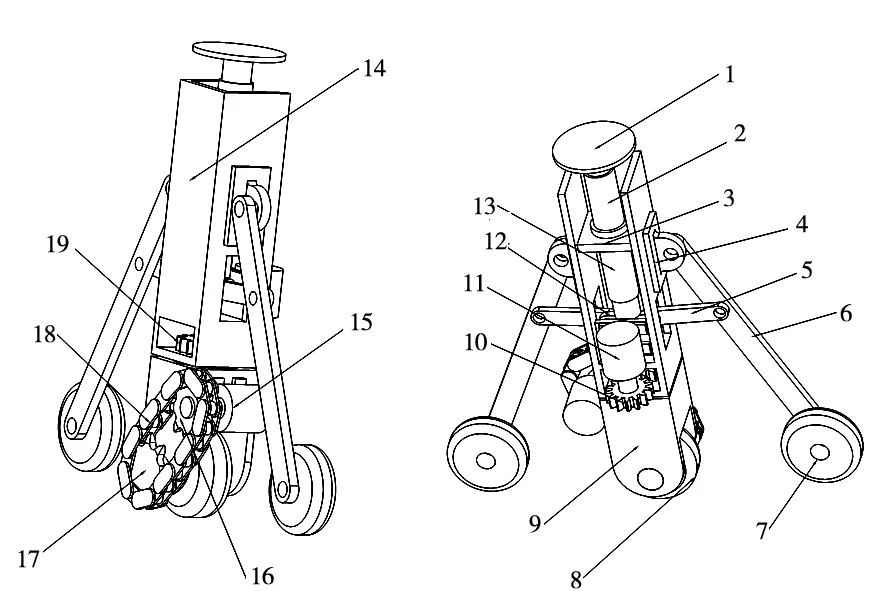
1.支撑托盘 2.支撑电推杆 3.固定侧板 4.挂耳 5.推动支撑杆 6.摆动杆 7.滚轮 8.驱动轮 9.底部转动架 10.齿轮11.转向步进电机 12.电推杆顶端挂耳 13.推动电推杆 14.上部壳体 15.驱动步进电机 16.驱动链轮 17.从动链轮 18.链条 19.转向齿轮图4 轮架结构图
2 控制系统设计
如图5所示,该智能搬运小车控制系统以MC9S12XS128单片机作为控制系统核心;并以黑白CMOS摄像头拍摄路线图像以PAL制式信号输出到处理模块(LM1881)进行视频同步信号分离;然后将图像及同步信号输入单片机控制核心(MC9S12XS128),通过单片机进行信号判断处理,并改变PWM波宽实现对小车转向及CMOS摄像头的转向控制。智能搬运小车采用CMOS摄像头进行图像采集,并运用直接边缘提取算法及图像滤波算法获取黑线的位置,进而通过动态阈值以实时适应搬运环境。
转向及电机驱动的控制按照输入的指令信号,由单片机控制输出;根据转速传感器、角位移传感器及红外测距传感器的反馈信号与指令信号相比较,构成3个闭环控制系统,来实现速度实时控制、角度定位及障碍物的判定;并且通过PID控制算法处理后得到控制量,进而改变电机驱动的PWM波占空比,智能控制行驶速度。此外,通过PD控制算法对CMOS摄像头及转向步进电机控制并配合角位移传感器,共同实现转向的精确控制。
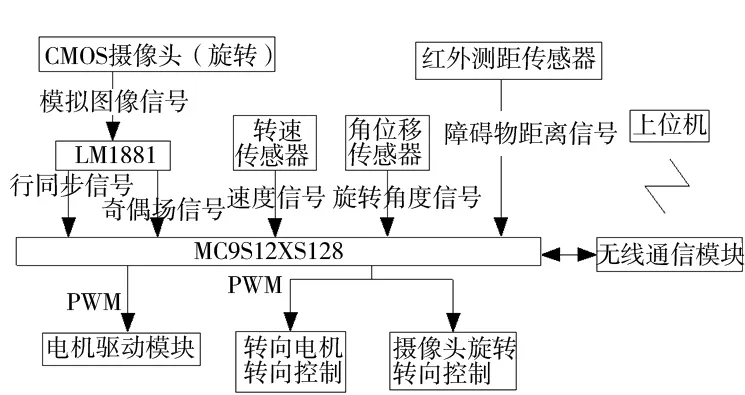
图5 控制系统结构图
2.1 控制算法设计
系统中,图像采集利用直接边缘提取算法及图像滤波算法获取黑线的位置,并通过动态阈值以实时适应搬运环境。转向及电机驱动的控制算法采用增量式PID控制算法,同时配合实际参数补偿的方法,使搬运过程更加快速、稳定。
2.1.1 图像采集及路径识别算法设计
图像采集算法流程图如图6所示。
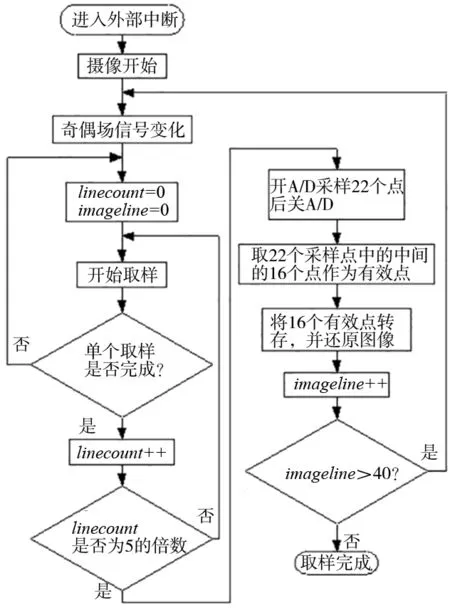
图6 图像采集算法流程图
实际搬运路线,地面背景为白色且布置有黑色引导线;继而采用隔行采集的方法来压缩图像数据。本图像采集以搬运小车的图像传感器单一方向的40个像素的分辨力为例;其前22行视频为场消隐信号,均匀采集288行视频图像信号,每隔7行采集场信号。
路径识别采用直接边缘算法;摄像头识别黑线后,通过求平均值计算黑线中心位置点。为了减少环境因素和直角交叉线的干扰,需对图像滤波矫正,具体方法为:
(1)当出现两段黑线直角交叉时,可保留最底端的一段,并加入路径识别的算法,制定相应的控制策略。
(2)当某一行求得的中心线位置与相邻的两行相差较大时,即视为该行错误,需采用中值滤波方法重新获取该行位置。
(3)CMOS摄像头可能安装中相对与轨迹线有一定的倾斜角度,即采集的图像存在一定的梯形失真;通过添加一个线性修正值来消除,该线性补偿系数由具体实验来确定。
2.1.2 转向和速度PID控制算法设计
搬运小车的转向及速度控制采用PID控制算法来控制,PID控制原理如图7所示。
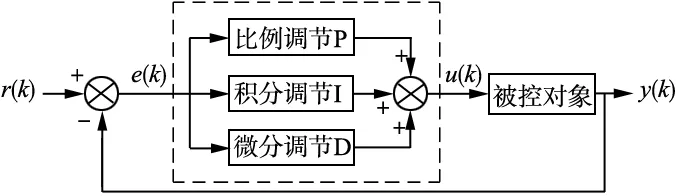
图7 PID 控制原理图
速度控制采用的策略为直角转弯处速度降为零,直道加速行驶。因而,需根据CMOS摄像头所获取的路线情况来决定当前速度,实时速度反馈值与当前设定速度存在的偏差为e(k),进而通过该偏差值来调节实时速度值。
采用增量式PID控制算法,其增量式为:
Δu(k)=A·e(k)-B·e(k-1)+C·e(k-2)

由上式可得,控制系统的采样周期一旦选定后就不会改变,即确定了Kp、Ti、Td;只需使用前后3次测量的偏差值就可推出控制增量。通过PID算法的控制调整,并配合图像的提取算法处理获得黑线位置及对应的PID参照速度,最终形成二次曲线的关系,使得小车在弯道和直道的相互过度时速度变化比较灵活。
转向控制采用PD控制,即将P项视为计算得到的黑线的位置和图像中心位置的偏差,D项认为选定行的黑线位置与前一图像中的黑线位置的差值。实际转向中,通过适当调节PD参数并配合角位移传感器的实时反馈共同实现小车的灵活、准确转向。针对实际运行中的情况,需做出相应的控制处理。路线识别算法具体步骤:
(1)按一定距离选取轨迹的黑点,计算所选n个黑点的位置相对与视场中心线的平均位置。
(2)当平均值与视场中心线的差值,为正向左转直角弯,为负向右转直角弯。
(3)对于起点、直角交叉线和终点的识别,通过黑线轨迹两旁黑线部分的长度进行识别;适当设定其宽度值的大小,进行识别。
2.2 软件系统设计
系统整体按功能分为运动控制模块、数据处理模块和人机交互界面,其系统功能如图8所示。运动控制模块主要通过系统对步进电机的动作进行具体划分,并接收传感器的实时反馈信号完成小车的具体动作控制。数据处理模块包含有摄像信号及传感器信号采集、A/D转换、算法控制等;采集的信号模拟量数据经软件转化为数字量,进而反馈形成闭环控制或直接人机交互界面显示。人机交互界面包括轨迹拟合界面、实时轨迹显示、运动控制界面;通过人机交互界面,不仅能实时观测小车的运行状态,而且可根据具体的要求进行人为控制。人机交互界面是通过无线通信模块,经上位机进行无线人机交互操作控制,并实时进行数据的无线传输。

图8 系统软件功能
智能搬运小车系统控制流程如图9所示。首先系统各控制端软件初始化,CMOS摄像头进行图像采集并识别路径;接着通过PD控制算法和角位移传感器的实时反馈共同实现稳定、精确的转向控制;采用红外测距传感器实时对周围障碍物的检测和PID控制算法实时调整车速并配合转速传感器的实时反馈实现小车的自动避障、快速、稳定的智能循迹效果;并将小车运动转角、速度、相对位置等信息通过无线传输模块输送于人机交互,进行动态显示及绘迹。
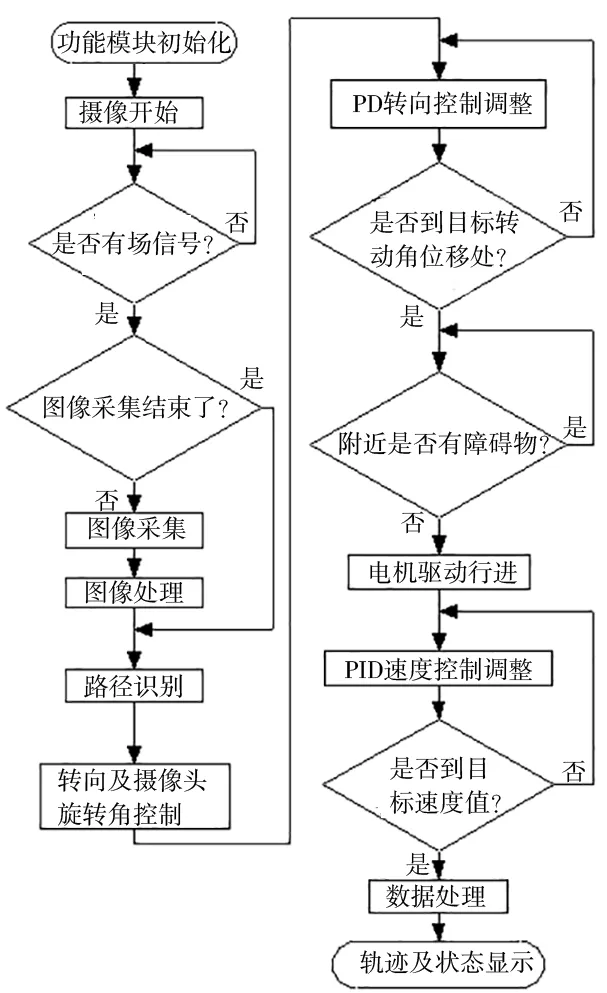
图9 系统流程图
3 结论
根据仓储物流中,对搬运工具的灵活性、智能化的要求设计了一种新型全方位智能搬运小车结构;根据新型智能搬运小车的控制系统设计研究可得以下结论。
(1)基于新型智能搬运小车的结构及运动原理的分析,保证了智能控制系统设计的具体性、可行性。
(2)控制系统采用图像采集软件分析,通过提取黑线实现了动态阈值的设定,并利用PID及PD控制算法,实现了小车的智能循迹与稳定、快速运行;并且对其他同类智能搬运系统设计提供了可行、高效的图像采集及运动控制算法。
(3)系统对相应传感器的实时反馈数据进行分析比对,并实时将数据无线传输于人机交互界面实现了小车运行状态的动态显示及实时对小车动作进行动态调整。
(4)根据具体工作环境及运动轨迹的设置,实现了该智能搬运小车在不同搬运场合的应用,同时也为同类智能搬运机构的改进提供了参考。
