传感器受限的车辆队列燃油经济性模型预测控制
2018-12-03,,
,,
(浙江工业大学 信息工程学院,浙江 杭州 310023)
当今社会对环境友好型的交通系统的需求越来越大,这种系统不仅可以减少对燃油的依赖,还能减少环境污染,如空气污染、全球气候变暖和雾霾等[1]。随着无线通信、传感器和信息科技等先进技术快速发展及新型的混合动力、纯电动车和先进交通管理系统的进步,环境友好型的智能交通系统逐渐趋于成熟[2]。在智能交通系统中有一个所谓的车辆队列的概念。车辆队列是指n辆自动车辆纵向排成一列,并且车与车之间保持安全间距,在保证车辆队列安全稳定运行的情况下尽量的减小车间距。车间距的减小可以有效地降低车辆受风阻力面积,减小车辆的动力输出,提升燃油经济性[3-5]。但过小的车间距提高的道路车流密度又降低了车辆行驶的安全性。进一步,在实际中车辆队列容易出现波动传递效应,即队列中某一车辆的位置和速度出现的不确定扰动经过不断放大,对整个队列未来状态会造成巨大的差异,从而影响车辆队列运行的稳定性,即队列稳定性(String stability)[6]。近年来,国内外相关学者就如何控制车辆队列来提升车辆燃油经济性开展了多方面研究,并取得了一些成果。Kamal等[7-10]通过获得道路标志、信号灯时序和交通流量等交通信息,结合车辆动力学和经济性能要求,提出了城市路况下的车辆经济性行驶控制策略,可以有效地提升燃油经济性。Zhao等[11]针对于时变的多目标控制问题,提出了一种实时权值调整策略,不仅避免车辆的碰撞,同时也实现了燃油的经济性和乘坐的舒适性。Homchaudhuri等[12]针对道路坡度对车辆燃油消耗的影响,提出一种快速优化算法的非线性的模型预测控制并得到车辆队列的控制输入去实现生态驾驶。刘安东等[13]针对不确定的城市路网系统提出了可以缓解城市交通拥堵和优化信号灯的控制策略的分布式鲁棒预测控制。这些方法都针对不同的影响燃油消耗的因素,提出相应的解决方案,在一定程度上保证车辆队列的燃油经济性。但是在上述所考虑的因素中没有考虑到车载雷达或超声波车载传感器所存在测量量程限制,这将使车辆队列控制系统产生切换效应[14],可能会导致车辆队列的不稳定行驶,对车辆队列的燃油经济性也会造成一定的影响。
考虑车载传感器测量量程受限,一种车辆队列参数化模型预测控制方法被提出。结合队列控制经典策略,对不同的传感器测量范围设计一组时滞参数化队列切换控制律。为计算控制律的自由参数,引入车辆队列跟踪性及燃油经济性,定义一个连续时间有限时域最优控制问题,再根据模型预测控制的滚动时域控制原理在线计算自由参数最优值。进一步,利用频域方法建立车辆队列系统的队列稳定性条件,从而确保车辆队列安全运行及燃油经济性。最后通过2种典型路况仿真验证所提出方法的有效性。
1 问题描述
考虑由n辆自动车辆组成的简化车辆队列系统,其中pi,vi,ai分别为第i辆车的位置、速度和加速度变量。车辆队列结构如文献[14]所示,可以看出车辆所需要的信号不仅来自前面车辆还来自领头车。领头车的信息通过广播发送给跟随车辆;邻近车辆的位置、速度和加速度的信息通过传感器(如红外传感器、雷达和超声波传感器等)测量得到。同时,车辆的执行机构(如踏板和刹车)、传感器的响应可能会引起时间延迟,对车辆队列的稳定运行造成一定的影响,因此时间延迟是一个必不可少的考虑因素。采用固定车距安全策略,δd>0为期望的安全车间距离,Li>0为车身长度。


(1)

考虑车辆队列系统时滞巡航控制策略为
(2)
在实际中,雷达、超声波和红外线等车载传感器的感知能力是有限的,如恶劣天气和设备老化都会造成测量受限,这将直接影响队列控制器式(2)的计算数值,影响到车辆队列的跟踪效果和燃油消耗量,因此测距传感器的测量输出特性采用文献[14]的模型。将输出特性模型代入式(2),可得相邻两车的控制增量为
(3)

Δu(t-τ)=Kx(t-τ)
(4)
式中K的形式参考文献[14]。
在车辆队列系统中,相邻两车保持安全的最小间距,不仅提升燃油经济性还能防止车距过大造成邻道车辆加塞,影响车辆队列的稳定行驶,因此对车间距误差限制合理的范围;进一步,为保证车辆速度跟踪,满足车辆队列系统的性能要求,对相对速度引入合理的范围限制;而车辆加速度变化会影响燃油经济性,因此纵向运动控制器要求系统的动力输出必须要在车辆加速和减速的能力范围内[4]。考虑车辆行驶过程状态和动力输出约束为
xmin≤xi(t)≤xmax,Δumin≤Δui≤Δumax
(5)
其中:xmin=[δmin,Δvmin,Δamin]T,xmax=[δmax,Δvmax,Δamax]T;δmin<0,Δvmin<0,Δamin<0和Δumin<0分别为车间距、速度差、加速度差和控制增量的最小值;δmax>0,Δvmax>0,Δamax>0和Δumax>0分别为车间距、速度差、加速度差和控制增量的最大值。将状态和动力输出限制在一定范围内,可以实现车辆队列快速、平缓的跟踪且不发生剧烈的抖阵,保证车辆的燃油经济性。
任何驾驶车辆的燃油消耗都受到各种因素的影响,如发动机转速、齿轮比和输出转矩等。精确建立车辆队列的燃油消耗模型是异常复杂和困难的,因此很多研究采用速度和加速度的函数近似描述车辆燃油消耗模型。速度和加速度的多项式模型来描述车辆瞬时消耗(mL/s)[12],即
(6)

为保证车辆队列的稳定运行,同时确保车辆队列的燃油经济性。计算增益参数,引入目标函数为

(7)
式中:采样时间tk=t0+kε,ε>0为采样周期,t0=0,k=0,1,2,…,T;T为预测时域。积分项中的第1项表示车辆队列在行进过程中的燃油消耗,第2项和第3项表示车辆队列的跟踪性能,确保车辆队列的稳定运行,第4项表示动力性能,这一项也会影响到燃油经济性。

1) 最小化燃油消耗:每一辆车的全部燃油消耗最小化。
2) 车辆巡航稳定性:保证跟随车辆快速渐近跟踪领头车的加速度变化。
3) 车辆队列稳定性:对于任意ω>0,保证‖Gi(jω)‖≤1,其中Gi(s)=δi(s)/δi-1(s),i=1,2,…,n。
2 车辆队列经济性预测控制
下面定义车辆队列系统的有限时域滚动优化控制问题为

Δumin≤Δui(t-τ;tk)≤Δumax
xmin≤xi(t;tk)≤xmax,t∈[tk,tk+T]
xi(tk;tk)=xi(tk)
(8)
定理1假设系统输出是零状态可观测的,且优化问题式(8)在初始时刻t0有解。当条件
(9)
证明考虑车辆队列系统中相邻车辆的相对加速度导数为
(10)
结合式(3)和文献[14]中的车辆运动学方程对式(10)做拉氏变换,得相邻车间距的传递函数为
(11)
让其中的eτs=1-τs,则其频率特性函数为

(12)
根据车辆队列稳定性(String stability)定义[16],对式(12)求模运算,得到的不等式条件为

(13)


显然当b≥0时,对任意ω>0有‖Gi(jω)‖≤1,i=1,2,…,n。当式(9)成立,有b≥0,从而定理1得证。
算法车辆队列参数化MPC算法
1) 设置采样周期ε>0,预测时域T>ε,参数ω1,ω2,ω3,ωΔu。
2) 计算采样时刻tk的车辆状态x(tk)和领头车状态x0(tk),应用模型预测控制方法求解优化问题式(8),得最优控制器增益参数K*(tk)。
3) 生成当前时刻的车辆队列控制输入Δu*(tk-τ),并作用于车辆队列系统式(1)。
4) 令k=k+1,返回步骤2)。
3 实例仿真

场景1领头车启动并加速
笔者所设计的控制策略存在时间延迟,假设延迟时间为2 s,则车辆的前3个时刻的初始状态分别都为[40 0 0],[32 0 0],[24 0 0],[16 0 0]。这就意味着初始车间距要比期望车间距大,其仿真结果如图1所示。
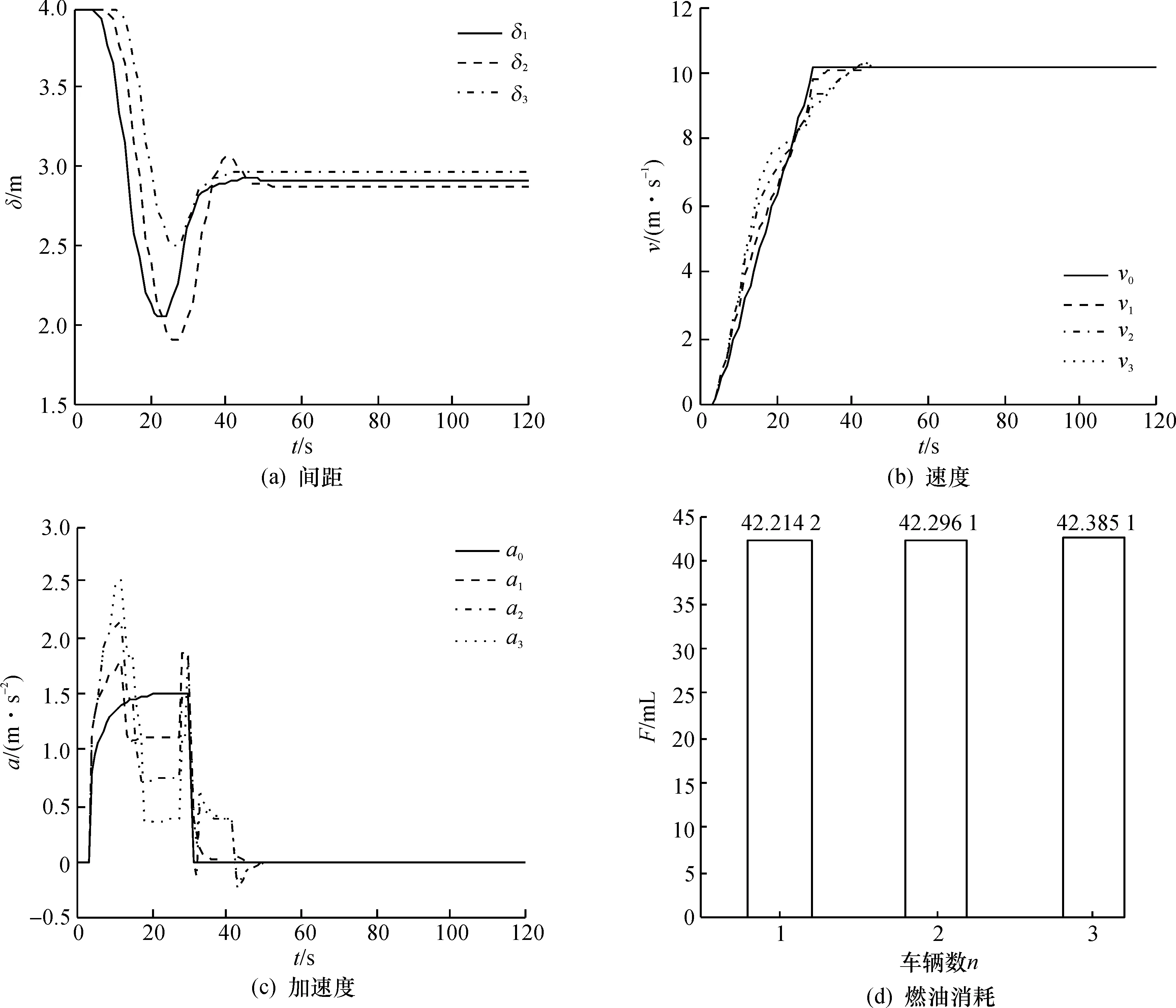
图1 车辆 队列车间距、速度、加速度及燃油消耗的变化Fig.1 the changes of the spacing, speed, acceleration and fuel consumption
由图1可以看出:采用所提出的控制策略和性能指标函数,可以保证在车辆队列安全行驶的情况下,乘坐的舒适性以及燃油的经济性。图1(a,b)中车间距最后基本上可以稳定在期望车间距附近,且跟随车辆的速度可以快速地跟随到领头车的速度,保证车辆队列的跟踪性能;图1(c)中加速度也比较平滑,因此也保证了车辆乘坐的舒适性和减少了车辆燃油消耗;图1(d)是跟随车辆每一辆车的燃油消耗量。
场景2领头车减速到一定值
车辆的前3个时刻的初始状态分别为[40 10 0],[42.5 10 0],[45 10 0];[32 10 0],[34.5 10 0],[37 10 0];[24 10 0],[26.5 10 0],[29 10 0];[16 10 0],[18.5 10 0],[21 10 0],其仿真结果如图2所示。
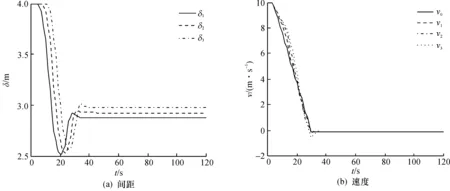

图2 车辆队列车间距、速度、加速度及燃油消耗的变化Fig.2 the changes of the spacing, speed, acceleration and fuel consumption
场景2的分析过程与场景1的类似,只是由于场景2的车辆队列是处于减速过程中,动力输出要比加速过程中的动力输出小,因此其燃油消耗量要比车辆队列在加速过程中的燃油消耗量小得多。
4 结 论
考虑车载传感器量程受限和行驶约束问题对车辆队列系统的稳定运行和燃油经济性的影响,提出了车辆队列参数化预测控制方法。根据传感器量程受限设计了时滞切换队列PD型控制策略,并且结合非线性的性能指标函数,保证队列系统车辆跟踪性能、燃油经济性和动力性能,在线滚动优化控制策略的自由参数,利用频域方法建立了车辆队列系统队列稳定性条件。通过仿真实验结果验证参数化模型预测控制方法的有效性,且后续研究将围绕时变的权重系数展开,研究时变的权重系数对车辆队列系统跟踪性和燃油经济性等性能的影响。