窄带随机激励双稳压电悬臂梁响应机制与能量采集研究∗
2018-12-02吴娟娟冷永刚乔海刘进军张雨阳
吴娟娟 冷永刚 乔海 刘进军 张雨阳
1)(天津大学机械工程学院,天津 300350)2)(卡特彼勒技术研发(中国)有限公司,无锡 214028)(2018年1月10日收到;2018年7月30日收到修改稿)
具有中心频率的窄带随机振动是一种典型的环境振动,其振动特征与环境的变化密切相关.本文以双稳压电悬臂梁能量采集系统为研究对象,分析系统在不同磁铁间距下的等效线性固有频率特性,以带通滤波器输出一定带宽的窄带随机激励模拟环境振动,研究系统的响应和能量采集特征.研究表明,对于一定带宽的窄带随机激励,一方面系统始终存在一个固定的磁铁间距使其输出达到峰值,另一方面当激励中心频率在一定范围内变化时,系统还分别存在另外两个或一个不同磁铁间距也能使系统输出达到峰值,而且该峰值特性是系统在其等效线性固有频率处诱导双稳或单稳“共振”形成的.研究结果可为具有窄带随机激励特征的振动能量采集提供一定的理论和技术支持.
1 引 言
近二十年来,微加工技术和微电子技术的进展,推动了无线传感、数据传输和医疗植入的微型化以及低能耗设备的发展[1].传统以化学电池为主的供能方式不仅增加了系统的尺寸和质量,而且供能寿命有限、难以更换,因此人们寻找可以长期有效供电的能量采集技术.
环境中的振动是无处不在的,获取环境中的振动能量有望解决微装置的供电问题.根据能量转换机理的不同,可以通过电磁式、静电式和压电式三种方式将振动能转化为电能[2].与其他两种方式相比,压电式振动能量采集器具有结构简单、能量转换密度大、易于微型化和集成化等优点[3],因而得到人们更多的关注.
压电能量采集器利用压电片的正压电效应将振动能转化成电能.由于线性结构的压电能量采集器具有狭窄的固有频率特性,当激励频率稍微偏离梁的固有频率时,产生的功率显著下降[4],因此需要寻找宽频带响应的能量采集器.
近年来,利用非线性结构实现宽频响应的能量采集方式得到了广泛关注.在系统中增加磁铁,或者利用压力负荷来屈曲杆,都能使压电能量采集器实现非线性双稳态振动,从而得到宽频响应的能量采集.Cottone等[5]和Gammaitoni等[6]进行了随机激励下的双稳态能量采集实验,分析了势阱参数对输出功率的影响.Ferrari等[7,8]数值仿真了随机激励下的非线性能量采集,并通过实验发现在双稳态振动下,压电悬臂梁的偏斜位移与输出电压明显大于在线性单稳态状态下的输出位移与电压.陈仲生和杨拥民[9]通过调整磁铁间距,使得能量采集器在宽带低频随机激励下实现宽带能量采集.Gao等[10]提出弹性支撑结构的非线性能量采集器,保证系统在低强度随机激励下也能发生双稳跃迁.
目前,非线性系统能量采集的研究主要是针对低频宽带随机激励或者谐波激励的能量采集研究,然而实际中很多情形下的激励往往不是单频周期激励或者低频宽带随机激励,而是能量集中在一定频率范围内的具有中心频率的窄带随机激励.例如一辆每小时63英里(1 mi=1.609344 km)行驶的1.6L福特汽车减振器垂直于路面方向的振动在10—30 Hz,克里夫顿悬索桥上的振动能量集中在22—46 Hz之间,热电联产发电机在正常工作情况下垂直于热水泵方向的振动主要在209—219 Hz范围内[2,11,12],人的运动和桥梁的振动频率在1 Hz左右[13,14].目前,基于非线性压电悬臂梁系统的窄带随机激励下的系统响应及其能量采集的研究还鲜有报道.本文以非线性双稳压电悬臂梁能量采集系统为研究对象,通过建立双稳压电悬臂梁的集总参数模型,探讨具有一定带宽的窄带随机激励对系统响应及能量采集的影响规律,研究系统等效线性固有频率与系统响应特性之间的关联性,为窄带随机激励作用的双稳压电悬臂梁能量采集系统获得更多的机电能量转换提供可行的理论和技术支持.
2 双稳压电悬臂梁能量采集系统的非线性特性
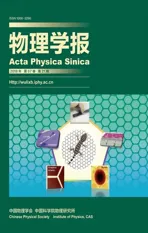
图1(a)是一个非线性压电悬臂梁能量采集系统受力分析图,压电悬臂梁B由金属板基底及其上粘贴的压电陶瓷片组成,永磁体A位于悬臂梁B的自由端,沿悬臂梁B水平轴线延长线上与永磁体A相对的位置固定一块永磁体C,永磁体C与永磁体A的物理特性和尺寸规格一致,且二者相互排斥,构成双稳系统.需要说明的是,系统处于平衡位置时,不考虑磁铁A的重力对压电悬臂梁静力形变的影响,此时磁铁A位于悬臂梁水平位置延长线上,磁铁A与外部磁铁C水平对中且相互排斥.
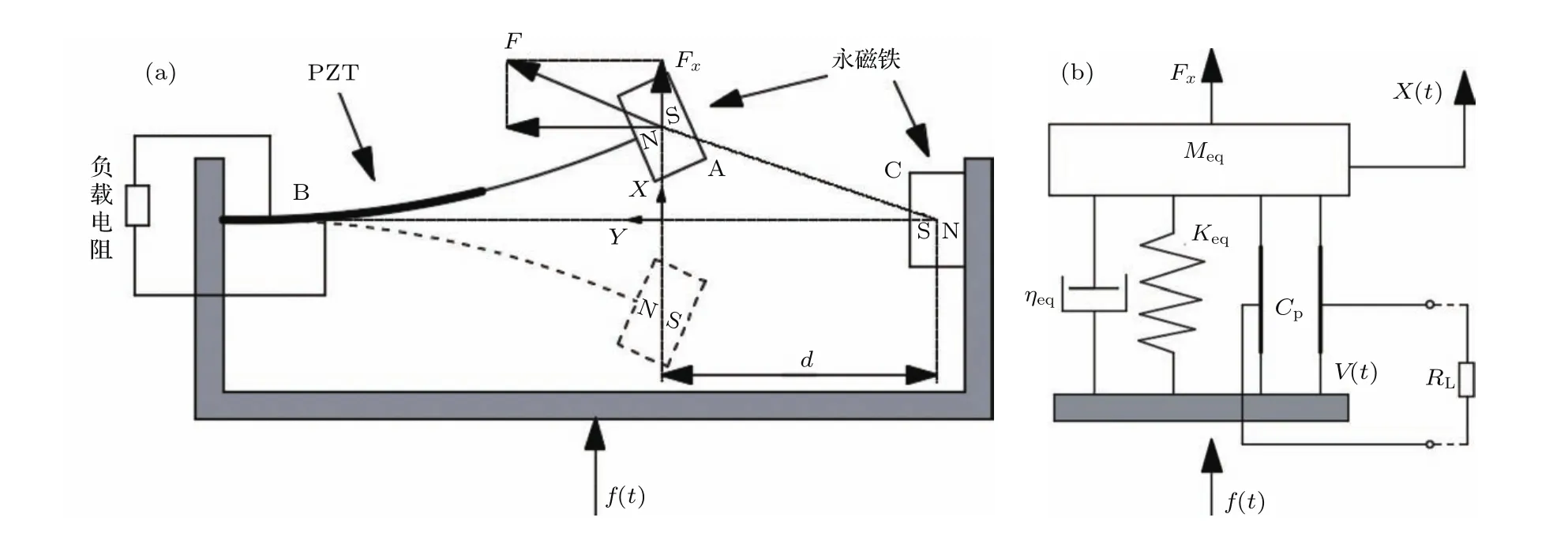
图1 非线性压电悬臂梁能量采集器 (a)受力分析图;(b)系统等效模型Fig.1.Energy harvesting system of nonlinear piezoelectric cantilever beam:(a)Diagram of force analysis;(b)equivalent model of energy harvesting system.
图1(a)结构可以简化为典型的质量弹簧阻尼等效模型,如图1(b)所示.由牛顿第二定律可得到系统集总参数的动力学方程[10]:

其中Meq,ηeq,Keq分别为系统的等效质量、等效阻尼和等效刚度;Fx为两磁铁之间的磁力F在竖直方向上的分力;f(t)为外界振动激励;θ为压电悬臂梁的机电耦合系数;以磁铁C中心为坐标原点,X(t)为磁铁A中心沿激励方向的位移;k为集总参数模型的幅值修正因子;V(t)为压电悬臂梁的输出电压.相应的压电能量采集电路如图2所示.

图2 压电能量采集电路图Fig.2.Circuit diagram of piezoelectric energy harvesting system.
由基尔霍夫第一原理可以得到采集电路的电学方程为

式中RL为负载电阻;Cp为采集电路的等效电容,

其中ε31为相对介电常数,ε0为真空绝对介电常数,wb和lb分别是悬臂梁基体的宽度和长度,te是压电陶瓷的厚度.
在两磁铁的间距d(两磁铁中心水平距离)为无穷大时,压电能量采集器为线性振子.线性压电振子的固有频率可由求得.方程(1)和(2)中各参数的表达式参考文献[10],悬臂梁的材料参数和几何参数见第5节中表1和表2,将相关的参数代入到线性压电振子固有频率的公式中,可以得到系统的固有频率fn=50.7 Hz.
根据磁化电流理论可计算两块磁铁A和C之间磁力的垂直分力为[15]

其中,MA为磁铁A本身的磁化强度;φ是MA与水平方向的偏转角,为磁铁A的上(或下)表面面积;lA,hA分别为磁铁A的长度和高度;µ0是真空导磁率;Hy1和Hy2分别表示磁铁C产生的磁场在磁铁A的上表面和下表面中心处沿Y轴方向上的磁场强度大小,如图3.
在不考虑重力的情况下,系统势能包括等效模型中的弹性势能和磁力Fx对磁铁做的功,由此可得系统在X=X0时刻位置的势函数:

图4给出了系统的势能函数U(X)随着磁铁间距d和位移X的变化,间距d很大时,系统趋近为线性系统,其势函数为单稳,表现为只在原点处出现一个稳定的平衡位置;随着间距d的减小,系统由线性系统变成非线性系统,其势函数由单稳变为双稳,即在两个势阱处出现两个稳定的平衡位置,在原点处出现一个非稳定平衡位置.
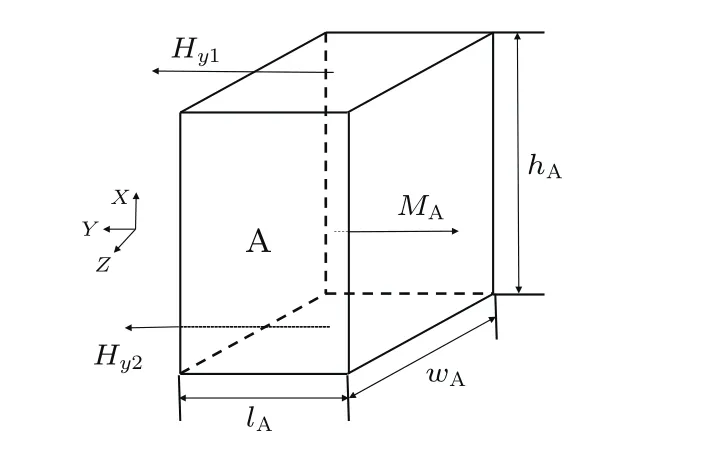
图3 磁铁A的尺寸结构及磁化方向示意图Fig.3.Schematic diagram of magnet A’s sizes and magnetization..
图4 系统势能函数U(X)与磁铁间距d和位移X的关系Fig.4.Dependence of the system potential function U(X)on magnet spacing d and displacement X.
在X=0处对磁铁力Fx进行泰勒展开,为了便于计算,参考文献[15]可将磁力的垂直分力近似表达为
省略高阶项可得近似结果为

这里,参数a,b通过(8)和(9)式计算:


参数b中的Tij表达式为

悬臂梁系统的非线性恢复力为
其中,KL=Keq−a.由(11)式可知,悬臂梁的非线性恢复力由悬臂梁的弹性力KeqX和两磁铁间磁力的竖直分力Fx=aX−bX3构成,而且a和b分别是磁力在竖直方向产生的线性刚度和非线性刚度.对(11)式求导可得到系统的总刚度KN为


图5 系统的线性刚度KL和非线性刚度b随磁铁间距d的变化Fig.5.Linear stiffness KLand nonlinear stiffness b of system varying with magnet spacings d.
(12)式表明,系统总刚度由线性刚度KL和非线性刚度b确定,并会随着磁铁间距d和位移X而变化.当磁铁间距d很大时,压电悬臂梁为线性振动,系统总刚度KN=Keq是一个定值.当d逐渐减小时,系统总刚度将受到a和b变化的影响.图5给出了系统总刚度中线性刚度KL和非线性刚度b随d的变化曲线.由图5可知,随着d的减小,KL逐渐由正数减小至负数,其中正负刚度的分界点在d0=11.29 mm处,此点也是系统双稳势阱运动和单稳势阱运动的分界点[16],而b随着d减小由零逐渐增大,表明非线性刚度逐渐增强,这与非线性磁力随间距减小而增大的因素成正相关关系.
3 等效线性固有频率的计算
为了能够更好地分析窄带激励下双稳能量采集系统的输出响应,参照文献[17]对系统进行线性化处理计算,以得到系统的近似等效线性固有频率.假定⟨X⟩是非线性双稳系统位移响应的均值,且其值不一定为0,做如下的转换:

其中X0(t)是等效线性系统的位移响应.令窄带随机激励f(t)为非线性双稳压电悬臂梁系统的输入,并令ωSL为等效线性化系统的固有频率,则动力学方程(1)可以写成


由

得

于是近似计算求得ω2SL=(KL+3b⟨X2⟩)/Meq,其中E表示为该参数的期望值.当激励强度较小,即满足3b⟨X2⟩小于|KL|(一个数量级以上)时,悬臂梁振动幅度也相对较小,等效线性化系统的固有频率可以近似为

图6给出了系统的等效线性固有频率fSL与磁铁间距d的关系,曲线最低点对应的间距正好对应系统线性刚度正负分界点的间距值d0=11.29 mm,也就是系统单稳和双稳势阱的分界点,该分界点值可根据KL=0计算得到.
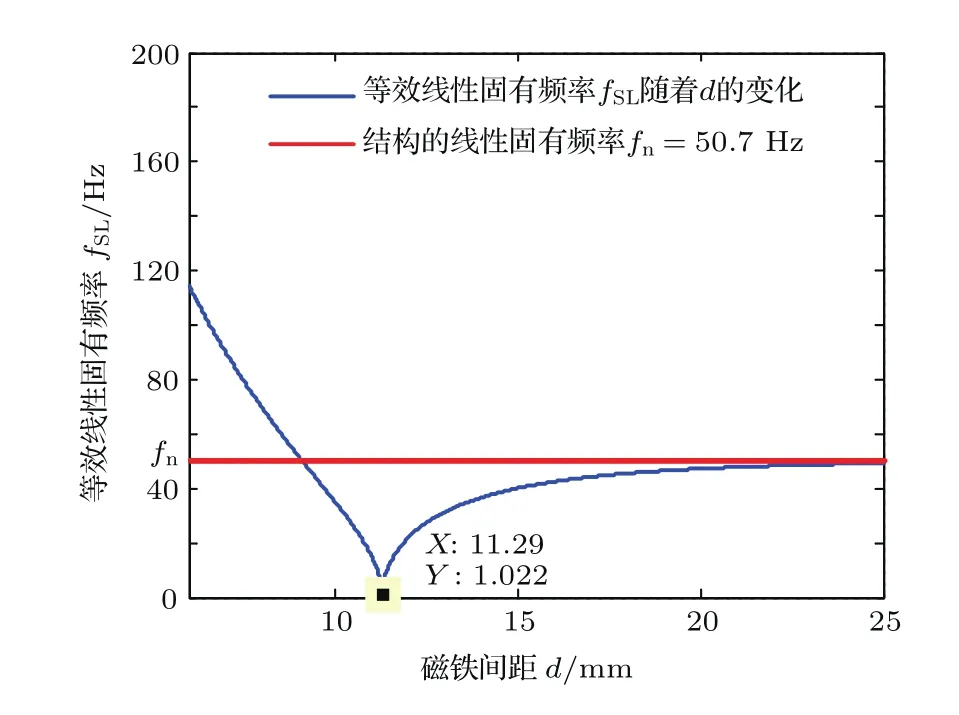
图6 系统的等效线性固有频率fSL与磁铁间距d的关系Fig.6.Equivalent linear natural frequency fSLof system varying with magnet spacing d.
这里需要强调的是,非线性方程(1)等效为线性化方程(14)后,由(17)式得到了图6反映等效线性系统方程(14)固有特性的等效线性固有频率特性曲线,该固有频率曲线随间距d变化,并在分界点间距d0处接近零.当等效线性系统(14)受到的激励频率(如窄带随机激励的中心频率)与其等效线性固有频率一致时,根据线性系统共振原理易得,系统响应会在等效线性固有频率处产生共振峰,且分界点间距d0左右两侧在等效线性固有频率处产生的共振峰响应分别具有双稳和单稳特性.此外,当等效线性固有频率fSL小于线性系统固有频率fn时,每一个fSL可对应两个不同的间距d值,分别在d0两侧;而当fSL>fn时,在一定频率范围内(如图6小于120 Hz),fSL只有一个小于d0的d值与之对应.
4 窄带随机激励的动态特性
环境中的窄带随机激励是大部分能量集中在中心频率附近、有一定频率带宽的限带随机激励,这种随机激励由中心频率、带宽和强度这三个参数确定[18].窄带随机激励f(t)可以通过将Gauss白噪声W(t)输入下面的带通滤波器得到[19,20]:

其中ωf为中心频率,γ为带宽.Gauss白噪声W(t)的功率谱密度函数由下式给出:

其中S0为输入白噪声W(t)的强度.W(t)的自相关函数Rin(τ)为

其中δ(τ)为狄利克雷函数.方程(18)输出激励f(t)的自相关函数Rout(τ)为
其中H(ω)为方程(18)的传递函数.由方程(18)可以求得

将(22)式代入(21)式,并进行积分可以得到


已知f(t)的均值为0,所以窄带随机激励f(t)的均方值等于Gauss白噪声激励W(t)谱密度的π倍.
图7是不同中心频率和带宽的随机激励f(t)的功率谱图,图中各曲线下的面积是与中心频率ωf和带宽γ无关的常数,即随机激励f(t)的强度(或方差)是常数.因此,将强度相同的Gauss白噪声输入参数ωf和γ大小不同的滤波器时,其输出的不同中心频率和带宽的窄带随机激励的强度是相同的.
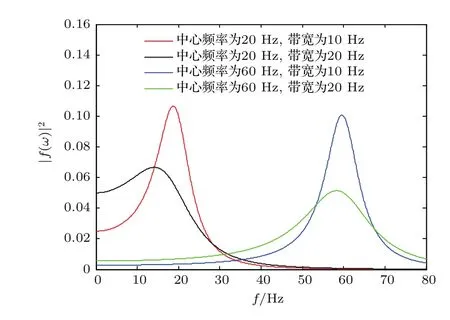
图7 不同中心频率和带宽的窄带随机激励的功率谱Fig.7.Power spectra of narrow-band random excitation with different center frequencies and bandwidths.
5 窄带随机激励中心频率对双稳压电悬臂梁响应与输出电压的影响
为了仿真窄带随机激励作用下系统的响应及能量采集性能,本文所采用的一组材料属性参数和系统几何结构尺寸分别见表1和表2,仿真分析中所需的其他参数RL=10 MΩ.对于一定形状尺寸的双稳压电悬臂梁能量采集系统,两磁铁间距d决定了非线性磁力的大小,因此系统输出电压的大小(由均方根值表示)将受d的影响而变化.
将强度D=0.2的Gauss白噪声激励输入γ=10 Hz和不同ωf值参数的带通滤波器(18)式,得到不同中心频率的窄带随机激励.将这些激励分别作用到系统方程(1)和(2)上,得到系统输出电压Vrms随磁铁间距d和窄带激励中心频率fc=2πωf的变化关系,如图8所示,图中模拟计算的d值分辨率为0.10 mm,fc值的分辨率为1 Hz.由图8可知,系统输出电压峰值呈现出一定的规律性.首先,无论fc取何值,系统总在d0=11.5 mm处附近出现峰值电压输出,类似于宽频带激励的最优间距[10],且该间距d0与窄带随机激励的中心频率无关.其次,除了d0=11.5 mm外,当fc值分别在(0,50 Hz)和(50 Hz,100 Hz)区间变化时,还分别存在另外两个和一个不同间距值也能产生峰值电压输出;而当fc值大于100 Hz后,没有额外间距值的峰值电压存在.
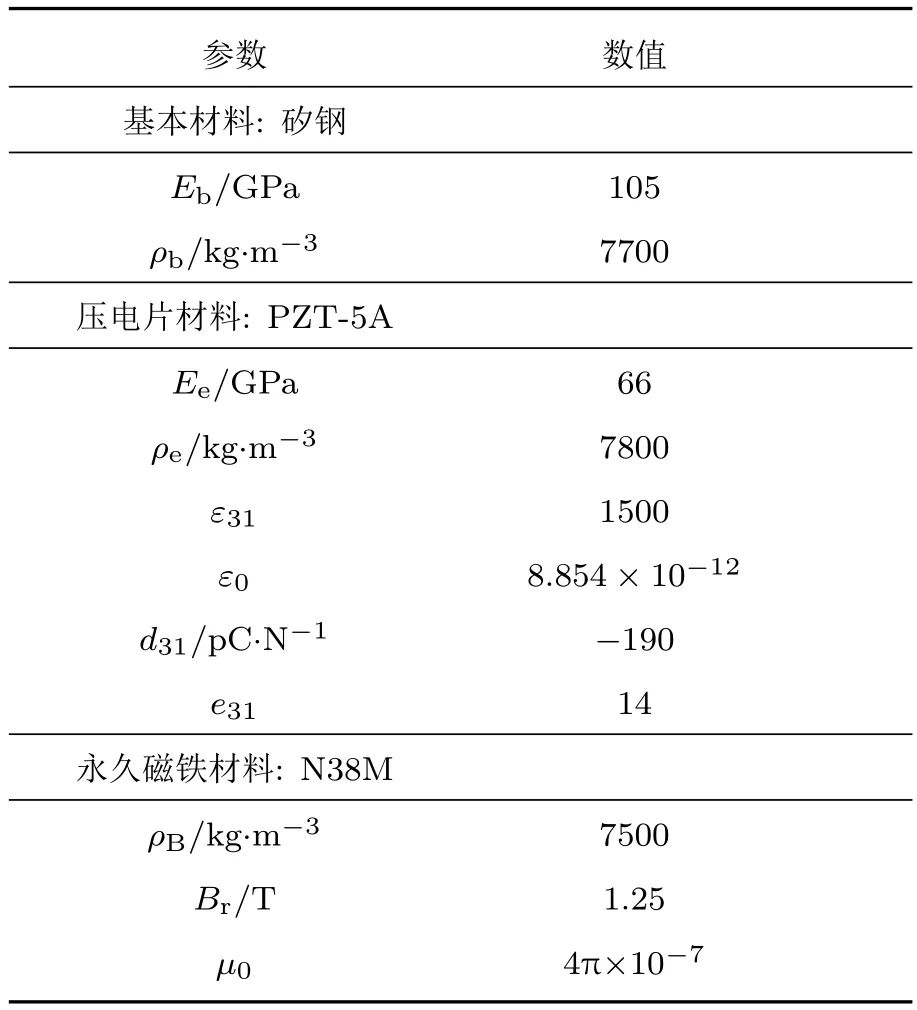
表1 悬臂梁的主要材料参数Table 1.Main material parameters of cantilever beam.
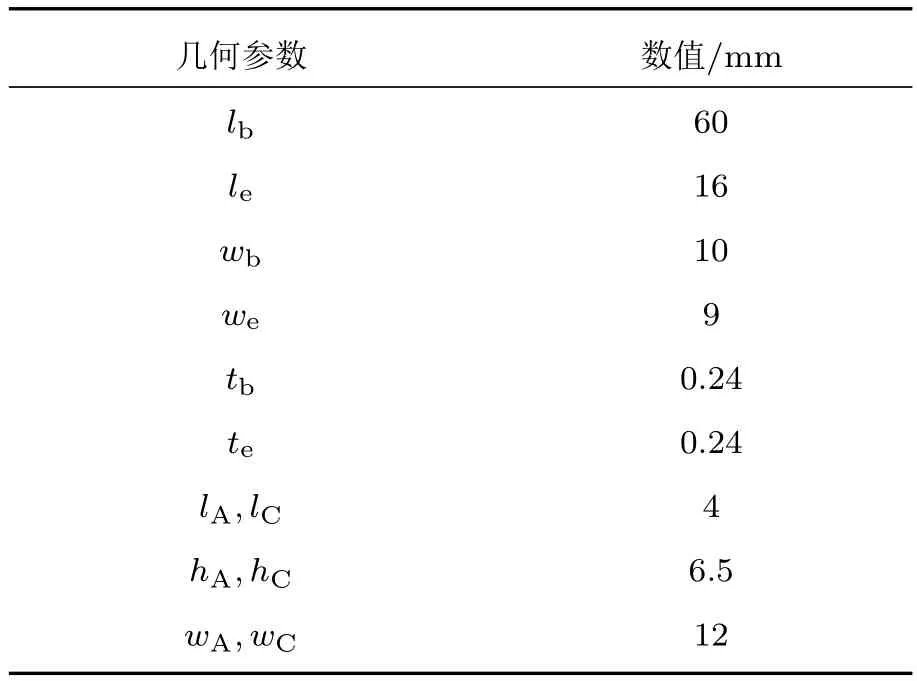
表2 悬臂梁的主要几何参数Table 2. Main geometric parameters of cantilever beam.
通过图8(b)和图6中两条弯曲线的相似性(其中两者之间的误差来自泰勒展开计算磁力和计算等效线性固有频率时的近似省略项),可判定图8(a)系统这种峰值输出电压间距随中心频率变化的规律,是与图6系统的等效线性固有频率随磁铁间距的变化规律有关.图8(b)中的两条弯曲线可以认为是中心频率与等效线性固有频率相等系统达到共振的响应峰值曲线,根据图6中等效线性固有频率曲线的单、双稳分界点,可知图8(b)中两曲线汇聚的最低点间距d0=11.5 mm应该是系统单、双稳的分界点间距,且d0的左右侧峰值曲线分别具有双稳和单稳性质的共振.此外,不同中心频率的窄带随机激励可在一个或两个磁铁间距下,诱导系统在其等效线性固有频率处产生双稳或单稳“共振”,从而使系统输出电压达到峰值.
图8 输出电压Vrms随磁铁间距d和窄带中心频率fc的变化图,其中激励强度和带宽分别为D=0.2和γ=10 Hz,图(b)是图(a)的俯视图Fig.8.Dependence of output voltage Vrmson magnet spacing d and the center frequency fcwhile D=0.2 and γ=10 Hz.Panel(b)is the top view of Panel(a).
除了在等效线性固有频率处产生的峰值输出外,图8(b)中在分界点间距d0处还多出一条峰值直线,该峰值间距与窄带激励的中心频率无关,它是由激励中的随机噪声引起的.为了验证这一推测,令方程(1)的激励f(t)为纯谐波激励作用于系统,得到系统响应输出电压与输入频率和磁铁间距的关系,如图9所示.可以看出,由于谐波激励没有随机噪声成分,所以就没有类似于图8(b)中间距不变的峰值输出曲线,由此验证了推测.下面根据中心频率fc由小增大的变化,分别讨论峰值输出电压对应不同间距d的系统响应机制.
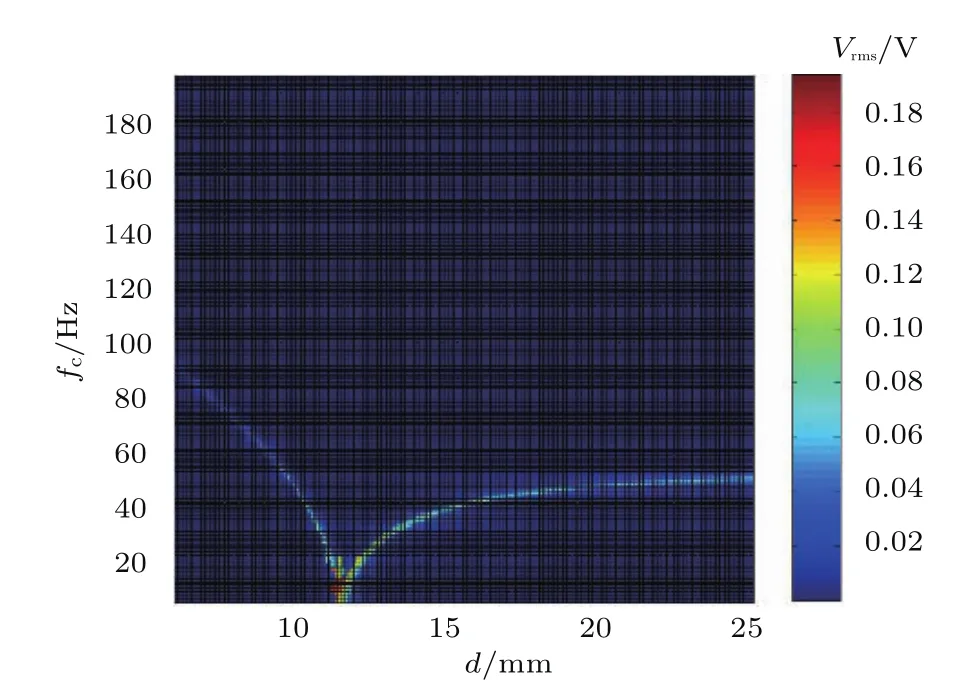
图9 纯谐波激励输出电压Vrms随磁铁间距d和谐波频率fc的变化规律Fig.9.Dependence of output voltage Vrmson magnet spacing d and the harmonic frequency fcunder pure harmonic excitation.
1)取中心频率fc=10 Hz.图10(a)给出了系统在该中心频率处输出电压与磁铁间距关系曲线Vrms-d,可知系统只存在一个最大峰值输出电压时磁铁间距d=11.2 mm(在图8的d0附近),它是窄带随机激励下系统响应始终存在的分界点间距.图11给出了该峰值间距d=11.2 mm处系统的位移响应、相图和输出电压频谱图.由图可知,此时能量采集系统的悬臂梁处于大幅度的双阱间跃迁振荡,其机电能量转换效果好,输出电压值可达到峰值0.1732 V.
根据图6分析,中心频率fc小于50 Hz时,应有3个间距对应峰值输出电压.之所以图10(a)只有1个间距的峰值电压,应该是模拟计算的d值分辨率太低,使3个间距的输出峰值“挤”在了一起.为证明这一点,将模拟计算d值分辨率提高到0.01 mm,图10(a)峰值处高分辨率d的细化波形如图10(b)所示.可以看出,在d=11.2 mm附近出现多个凸起的小峰值,表明图10(a)中无法分辨出明显的3个峰值间距,是由于太低的间距分辨率和随机干扰的影响.实际上图8在10 Hz中心频率处也很难分清3个明显间距的峰值.
根据图6可知,fSL=10 Hz处的间距d1=11.1 mm和d2=11.3 mm非常接近,与图10的分界点间距d=11.2 mm几乎重合,所以在该激励中心频率下,理论上存在的两个峰值间距d1和d2在图10或图8中很难分辨.

图10 激励中心频率fc=10 Hz时输出电压Vrms与磁铁间距d的关系 (a)d=0.10 mm;(b)d=0.01 mmFig.10.Output voltage Vrmsvarying with magnet spacing d when fc=10 Hz:(a)d=0.10 mm;(b)d=0.01 mm.
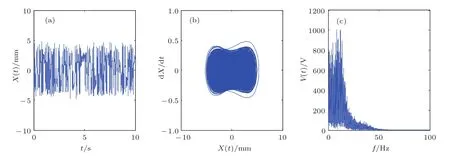
图11 激励中心频率fc=10 Hz和磁铁间距d=11.2 mm时系统的(a)位移响应、(b)相图、(c)输出电压频谱图Fig.11.(a)Displacement response,(b)phase diagram,(c)spectrum diagram of output voltage when fc=10 Hz and d=11.2 mm.
2)取中心频率fc=25 Hz.图12(a)是该激励下系统输出电压与磁铁间距关系曲线Vrms-d,相比于fc=10 Hz的情况,此时Vrms-d曲线中除了在图8的d0附近有一个峰值间距d=11.1 mm外,还多了一个dR=12.1 mm的峰值间距.d=11.1 mm仍是系统始终存在的双稳响应的分界点间距,该间距处的位移响应、相图和输出电压频谱如图13所示.dR=12.1 mm因大于分界点间距,故在dR间距处产生了单稳性质的共振输出,dR处的位移响应、相图和输出电压频谱如图14所示.
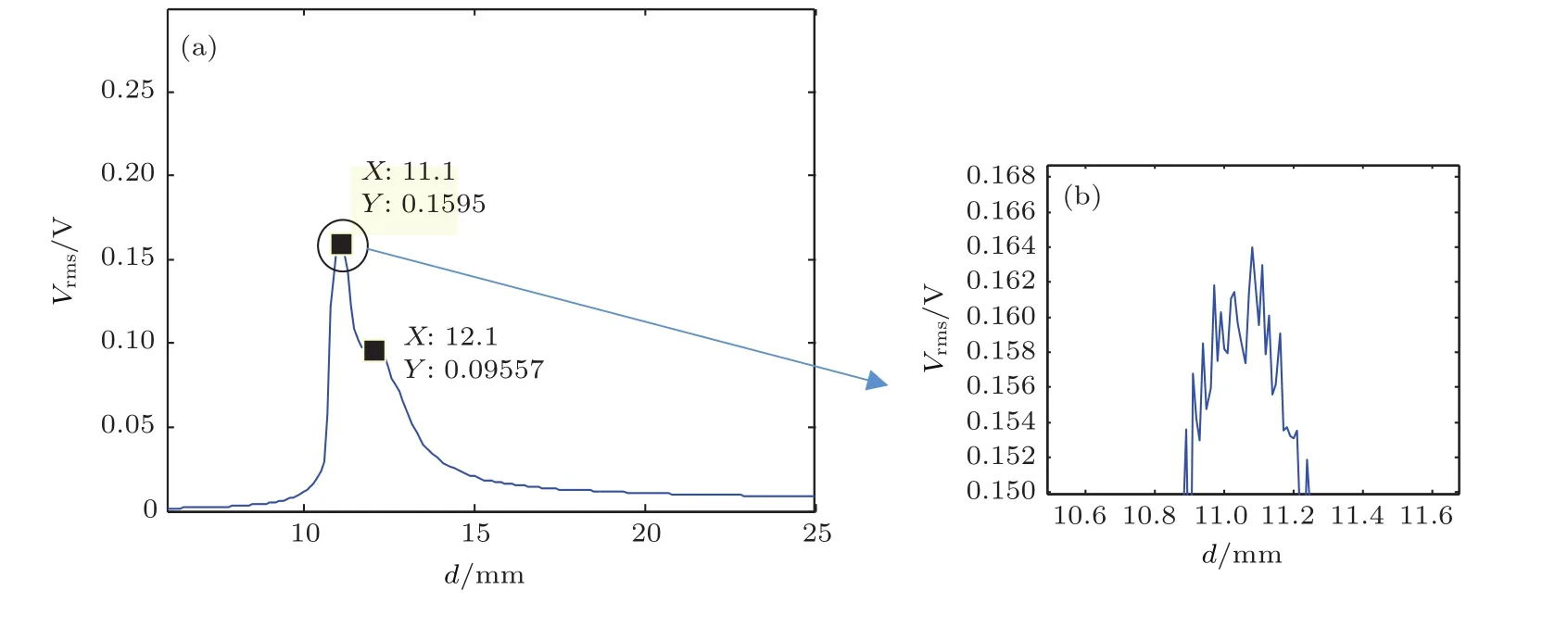
图12 激励中心频率fc=25 Hz时输出电压Vrms和磁铁间距d的关系 (a)d=0.10 mm;(b)d=0.01 mmFig.12.Output voltage Vrmsvarying with magnet spacing d when fc=25 Hz:(a)d=0.10 mm;(b)d=0.01 mm.

图13 激励中心频率fc=25 Hz和磁铁间距d=11.1 mm时系统的(a)位移响应、(b)相图、(c)输出电压频谱图Fig.13.(a)Displacement response,(b)phase diagram,(c)spectrum diagram of output voltage when fc=25 Hz and d=11.1 mm.

图14 激励中心频率fc=25 Hz和磁铁间距d=12.1 mm时系统的(a)位移响应、(b)相图、(c)输出电压频谱图Fig.14.(a)Displacement response,(b)phase diagram,(c)spectrum diagram of output voltage when fc=25 Hz and d=12.1 mm.
根据图6可知,在fc=25 Hz时,系统的另一个双稳性质的共振响应峰值间距是d1=10.6 mm,但在图12(a)中并没有出现,原因仍然是d值模拟分辨率过低.将模拟计算的d值分辨率提高到0.01 mm,重新计算后的结果如图12(b),可以发现系统在d=11.1 mm附近处有许多凸起的小峰值而不是两个,这同样是由于太近的间距加上随机干扰,很难明显判断两个间距的峰值.实际上图8在25 Hz中心频率处也只能看清峰值间距d0右侧的峰值输出,而很难分清峰值间距d0和左侧间距对应的峰值.
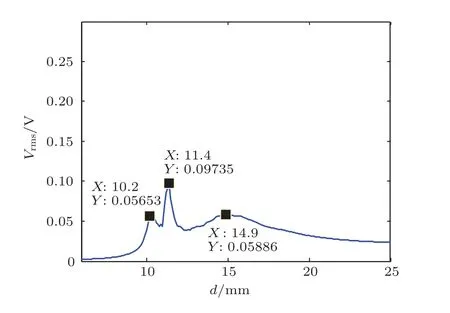
图15 激励中心频率fc=40 Hz时输出电压Vrms和磁铁间距d的关系Fig.15.Output voltage Vrmsvarying with magnet spacing d when fc=40 Hz.
3)取中心频率fc=40 Hz.图15是该激励频率下系统输出电压与磁铁间距关系曲线Vrms-d,此时Vrms-d曲线在3个间距d=11.4 mm,dL=10.2 mm和dR=14.9 mm处呈现出3个明显的峰值.显然,d=11.4 mm仍是系统双稳响应的分界点间距d0,其位移响应、相图和输出电压频谱如图16所示.而根据图6可知,fSL=40 Hz处的两个间距d1=9.8 mm和d2=14.9 mm,分别对应图15中的dL=10.2 mm和dR=14.9 mm.因dR=14.9 mm大于分界点间距,故其响应是单稳态的共振响应,dR处的位移响应、相图和输出电压频谱如图17所示.而在dL=10.2 mm处,系统响应虽然也是单稳态的振荡响应,如图18所示系统的位移响应、相图和输出电压频谱,但因dL=10.2 mm小于分界点间距,且该间距系统具有双稳振动特性,故其响应是在双稳势阱中的一个单势阱内的共振振荡响应.在图8中心频率40 Hz处,3个间距峰值也已清晰可见.
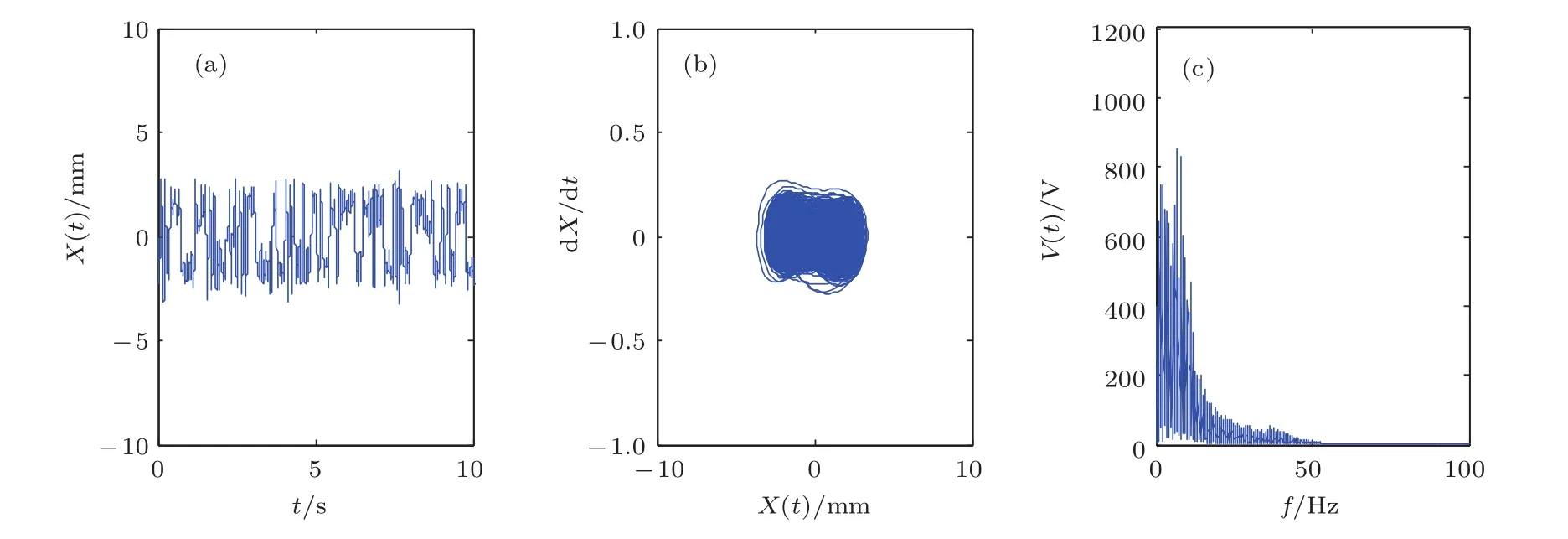
图16 激励中心频率fc=40 Hz、磁铁间距d=11.4 mm时系统的 (a)位移响应、(b)相图、(c)输出电压频谱图Fig.16.(a)Displacement response,(b)phase diagram,(c)spectrum diagram of output voltage when fc=40 Hz and d=11.4 mm.

图17 激励中心频率fc=40 Hz、磁铁间距dR=14.9 mm 时系统的 (a)位移响应、(b)相图、(c)输出电压频谱图Fig.17.(a)Displacement response,(b)phase diagram,(c)spectrum diagram of output voltage when fc=40 Hz and d=14.9 mm.
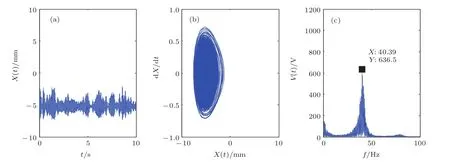
图18 激励中心频率fc=40 Hz、磁铁间距dL=10.2 mm 时系统的 (a)位移响应、(b)相图、(c)输出电压频谱图Fig.18.(a)Displacement response,(b)phase diagram,(c)spectrum diagram of output voltage when fc=40 Hz and d=10.2 mm.
4)取中心频率fc=50 Hz.图19是该激励下系统输出电压与磁铁间距关系曲线Vrms-d,由于fc=50 Hz与系统线性固有频率几乎相等,因此50 Hz中心频率的系统响应可能出现3个峰值间距,也可能出现两个峰值间距.图19所示的Vrms-d曲线中出现了两个明显的峰值间距,分别是dL=9.6 mm和d=11.4 mm.显然,d=11.4 mm仍是系统双稳响应的分界点间距d0,其位移响应、相图和输出电压频谱如图21所示,且根据图6易知,fSL=50 Hz处的1个间距d1=9.2 mm应该就是dL=9.6 mm,且dL小于分界点间距,因此系统在此间距响应是双稳势阱中的一个单势阱内的共振振荡响应,图20是dL处的位移响应、相图和输出电压频谱.
另外,由于中心频率在线性系统的固有频率处,因此随着磁铁间距的增大,系统逐渐从非线性变成线性,其响应逐渐表现为中心频率的线性共振与随机激励振动的合成响应,其响应值随着间距d的增大而增大并趋于一个定值,如图19所示.
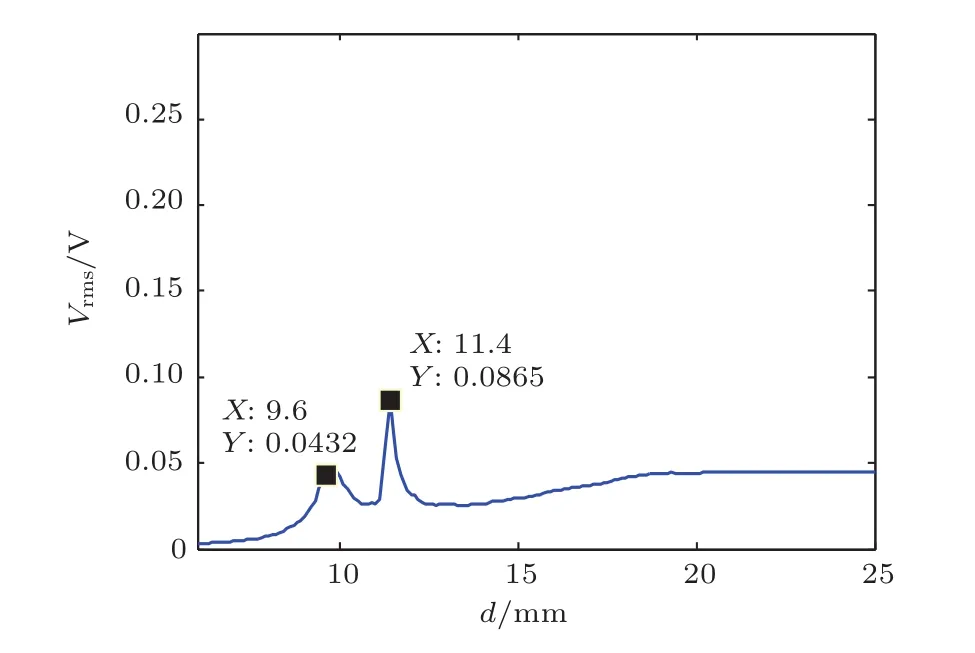
图19 激励中心频率fc=50 Hz时输出电压Vrms和磁铁间距d的关系Fig.19.Output voltage Vrmsvarying with magnet spacing d when fc=50 Hz.

图20 激励中心频率fc=50 Hz、磁铁间距d=9.6 mm时系统的(a)位移响应、(b)相图、(c)输出电压频谱图Fig.20.(a)Displacement response,(b)phase diagram,(c)spectrum diagram of output voltage when fc=50 Hz and d=9.6 mm.
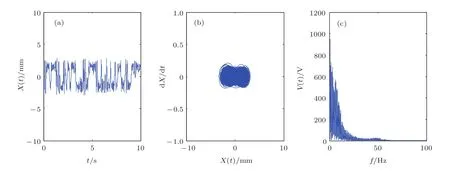
图21 激励中心频率fc=50 Hz、磁铁间距d=11.4 mm时系统的 (a)位移响应、(b)相图、(c)输出电压频谱图Fig.21.(a)Displacement response,(b)phase diagram,(c)spectrum diagram of output voltage when fc=50 Hz and d=11.4 mm.
5)取中心频率fc=70 Hz.由图22可知,系统输出电压Vrms-d曲线有两个峰值,对应的磁铁间距分别为dL=7.9 mm和d=11.4 mm.由于70 Hz大于fn=50 Hz,因此与图6对比不难看出,除了d=11.4 mm是系统双稳响应的分界点间距d0(如图23该间距处的位移响应、相图和输出电压频谱图),在fc=70 Hz时,系统只存在1个小于分界点间距的双稳单势阱内的共振振荡响应间距7.9 mm,其位移响应、相图和输出电压频谱图如图24所示.
6)取中心频率fc=120 Hz.图25表明该激励频率下的系统输出电压Vrms-d曲线只有一个峰值间距,对应图8系统双稳响应的分界点间距d0=11.5 mm,其位移响应、相图和输出电压频谱如图26所示.在该频率处,图6中已不存在对应等效线性固有频率的间距值,所以此时系统只在间距d0存在峰值电压输出.
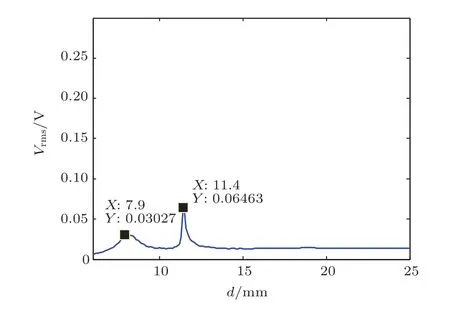
图22 激励中心频率fc=70 Hz时输出电压Vrms和磁铁间距d的关系Fig.22.Output voltage Vrmsvarying with magnet spacing d when fc=70 Hz.
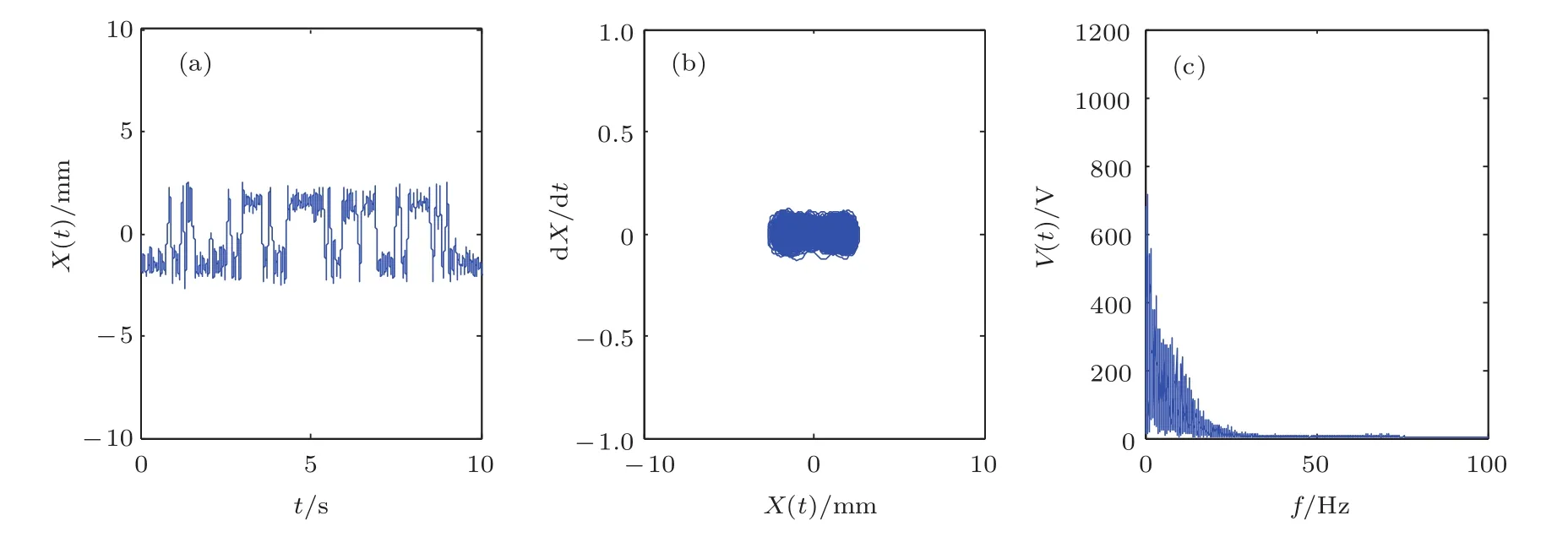
图23 激励中心频率fc=70 Hz、磁铁间距d=11.4 mm时系统的 (a)位移响应、(b)相图、(c)输出电压频谱图Fig.23.(a)Displacement response,(b)phase diagram,(c)spectrum diagram of output voltage when fc=70 Hz and d=11.4 mm.

图24 激励中心频率fc=70 Hz、磁铁间距d=7.9 mm时系统的(a)位移响应、(b)相图、(c)输出电压频谱图Fig.24.(a)Displacement response,(b)phase diagram,(c)spectrum diagram of output voltage when fc=70 Hz and d=7.9 mm.
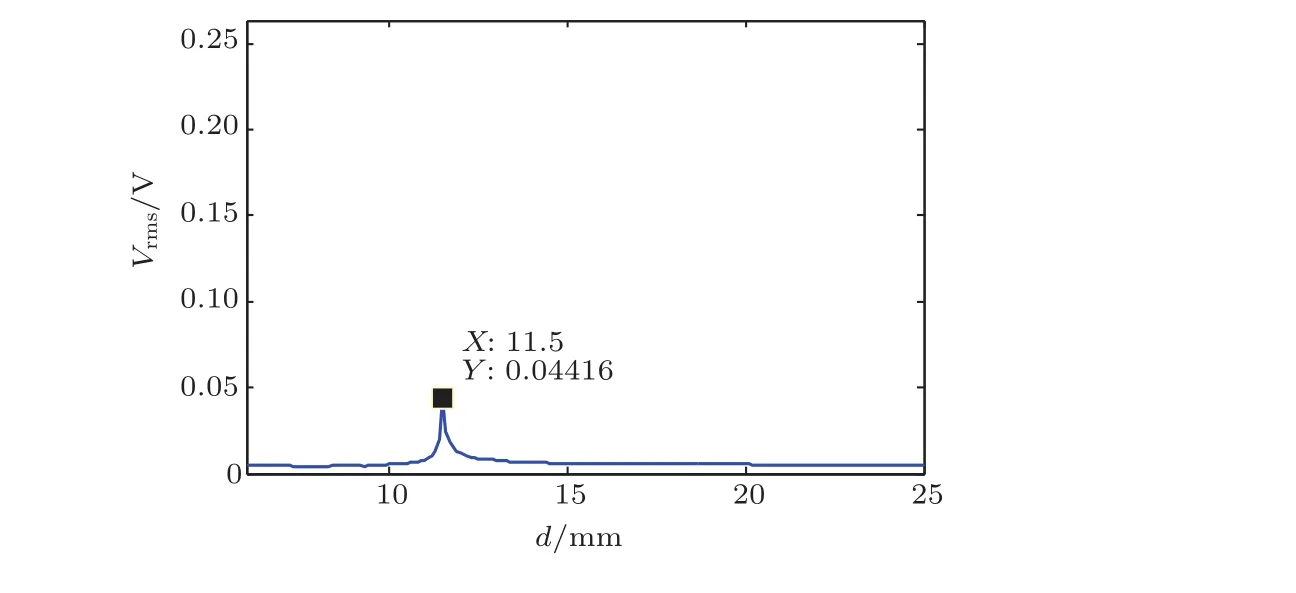
图25 激励中心频率fc=120 Hz时输出电压Vrms和磁铁间距d的关系Fig.25.Output voltage Vrmsvarying with magnet spacing d when fc=120 Hz.

图26 激励中心频率fc=120 Hz、磁铁间距d=11.5 mm时系统的(a)位移响应、(b)相图、(c)输出电压频谱图Fig.26.(a)Displacement response,(b)phase diagram,(c)spectrum diagram of output voltage when fc=120 Hz and d=11.5 mm.
6 实验验证
为了验证前面的理论分析与仿真模拟结果,本文参考表1和表2的参数制作了压电悬臂梁能量采集结构,经测量该压电悬臂梁的线性固有频率为15 Hz.压电陶瓷的型号为PZT-5A,结构上采用双晶片结构,两层压电陶瓷片同极化方向排列,与中间电极层紧密粘结,在压电陶瓷上下表面引出导线作为电压输出,中间电极层即悬臂梁基体的材料为矽钢.压电悬臂梁自由端固定有永磁铁A,型号为N38M,其根部固定在基座1上,且基座1可以在能量采集结构底板基座2上沿梁长度方向水平移动,用于调整磁铁间距d.与磁铁A一样的磁铁C固定在基座3上,且基座3与底板基座2固定,见图27(a).压电悬臂梁平面平行于底板基座2平面放置,整个能量采集结构通过底板基座2与激振器连接.同时,悬臂梁平面垂直方向放置有位移传感器,用以采集悬臂梁振动时的位移响应.
此外,为了满足前文提到的“系统处于平衡位置时,不考虑磁铁A和外部磁铁C的重力对压电悬臂梁静力形变的影响”的假设,实际实验过程中,底板基座2平面及悬臂梁的平面均垂直于地面放置,如图27(b)所示,即激振器沿平行于地面的方向激励底板基座2振动,以消除磁铁的重力对压电悬臂梁的静力形变影响.
整个实验测试系统框架如图28所示.实验中,首先在计算机中生成强度为0.2、带宽为5 Hz、中心频率不同的窄带激励数字信号,然后通过USB接口输入给信号发生器,再由信号发生器输出并经过功率放大器和激振器作用于能量采集器上,能量采集器的压电悬臂梁在窄带激励的作用下振动发电,其压电片产生的电压通过引线由数据采集器进行采集,位移传感器测量的悬臂梁振动位移也同时由数据采集器进行采集,电压和位移两信号同时送入计算机中进行分析.实验激励强度以加速度值度量,保持0.5 g有效值.

图27 压电振动能量采集系统实验结构图Fig.27.Experimental structure of piezoelectric vibration energy harvesting system.
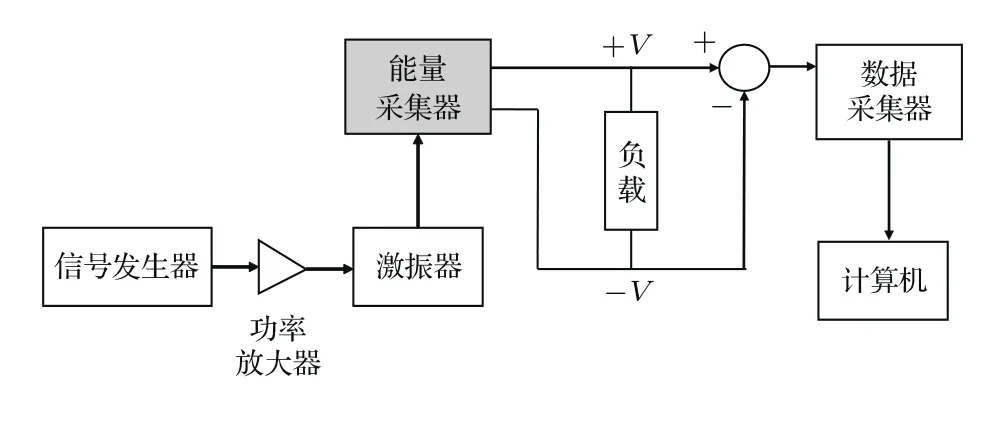
图28 压电振动能量采集器实验测试系统Fig.28.Experimental test system of piezoelectric vibration energy harvesting system.
通过调节磁铁间距d和激励中心频率fc,实验中分别记录了不同d值和fc值下压电悬臂梁的输出电压均方值Vrms,仿照图8(a)和图8(b),可以绘制输出电压均方值Vrms关于磁铁间距d和激励中心频率fc的关系,如图29(a)和图29(b)所示.可以看出,图8(a)和图8(b)与图29(a)和图29(b)的形状相似,说明窄带激励下系统的电压输出特性与仿真模拟的结果基本一致.无论激励中心频率为多少,压电悬臂梁系统始终在d0=18 mm附近出现峰值电压输出,可判定此间距为窄带激励下系统的分界点间距,该峰值输出是由激励中的随机成分引起的.当激励中心频率小于15 Hz时,分界点间距d0左右两侧分别出现具有双稳和单稳振动特性的峰值电压,该两峰值是由激励中心频率与系统等效线性固有频率一致引起的.且在激励中心频率较小时,两侧的峰值间距与d0非常接近,在实验分辨率下无法明显体现出来.当中心频率大于15 Hz且小于40 Hz时,系统仅在分界点间距d0左侧出现1个具有双稳振动特性的峰值电压.当中心频率超过40 Hz后,系统不存在由激励中心频率与系统等效线性固有频率一致引起的峰值电压输出.这些实验结果验证了理论分析及模拟结果的正确性.
为了进一步理解实验中系统的振动响应情况,图30给出了激励中心频率为13 Hz时,激振台的加速度响应及其频谱图,图31给出了该激励条件下,系统在3个峰值间距(d0=18 mm,dL=16 mm,dR=24 mm)下的位移-时间图.由图31可知,系统在3个峰值间距下的振动状态分别是:双稳跃迁振动、双稳单势阱内振动、单稳振动,与理论分析中fc=40 Hz时3个峰值间距下系统的振动响应情况相符合.

图29 输出电压Vrms随磁铁间距d和窄带中心频率fc的变化,其中激励强度和带宽分别为D=0.2和γ=5 Hz;图(b)是图(a)的俯视图Fig.29.Dependence of output voltage Vrmson magnet spacing d and the center frequencies fcwhile D=0.2 and γ=5 Hz.Panel(b)is the top view of panel(a).

图30 激励中心频率fc=13 Hz时,激振台的激励状态 (a)加速度响应;(b)加速度频谱Fig.30.Excitation state of the vibrator when fc=13 Hz:(a)Acceleration response;(b)acceleration spectrum.
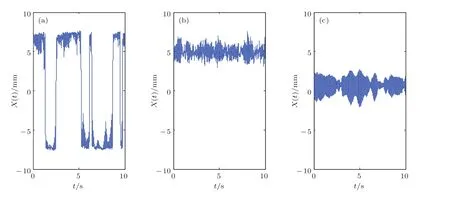
图31 激励中心频率fc=13 Hz时,不同峰值间距下系统的位移响应 (a)d0=18 mm;(b)dL=16 mm;(c)dR=24 mmFig.31.Displacement response under different magnet spacings when fc=13 Hz:(a)d0=18 mm;(b)dL=16 mm;(c)dR=24 mm.
7 结 论
本文以双稳压电悬臂梁能量采集系统为研究对象,探讨了不同中心频率窄带随机激励下系统的响应和能量采集特性.研究结果表明:对于一定带宽的窄带随机激励,1)系统始终存在一个可产生响应峰值的磁铁间距(称为分界点间距)d0,这一特性类似于宽频带随机激励的双稳系统在最优磁铁间距处产生响应峰值的双稳响应特性;2)当激励频率由小到大依次变化且不超过某个频率值时,系统分别存在另外两个或一个不同磁铁间距(d1和d2或d1)也能使系统响应达到峰值电压,且系统这种峰值输出电压间距随中心频率变化的规律,是与系统的等效线性固有频率随磁铁间距的变化规律一致;3)磁铁间距d1和d2处的系统峰值输出电压,是由系统在其等效线性固有频率处诱导产生双稳或单稳“共振”形成的;4)由于在一定带宽的窄带激励下,系统响应存在3个峰值间距d0,d1和d2,因此对于实际环境变化的窄带激励,可根据具体工况将能量采集系统的磁铁间距进行合理安排,以实现更好的机电能量转换.