达芬奇机器人与传统腹腔镜手术治疗宫颈癌的meta分析
2018-11-29冉林灵重庆医科大学附属第一医院妇科重庆400016
冉林灵,肖 琳(重庆医科大学附属第一医院妇科重庆400016)
宫颈癌是最常见的妇科恶性肿瘤之一,是威胁我国女性生命健康的主要公共卫生问题之一[1]。宫颈癌的治疗主要包括手术治疗、放射治疗及化疗3种,其中手术是治疗宫颈癌的主要手段,但手术会带来新的创伤。因此,为提高治疗效果、降低手术创伤、加快手术后恢复和保留生理功能,个体化手术成为当代妇科手术的发展趋势和目标[2]。随着微创手术的逐渐发展,腹腔镜下宫颈癌根治术成为治疗宫颈癌最普遍的手术方式,且技术已相对成熟。近年来,随着机器人手术系统发展,机器人手术已开始逐步应用于妇科手术中。因此,研究机器人技术在临床应用中是否具有有效性及安全性至关重要。本研究比较了机器人手术与普通腹腔镜手术在宫颈癌中的应用,并主要从手术时间、出血量、住院时间、清扫淋巴结数量、并发症发生概率及拔除尿管时间方面进行了验证。
1 资料与方法
1.1 资料
1.1.1 一般资料 本次meta分析包括从建库至2017年12月在国内外正式刊物上发表的共15篇关于有关达芬奇机器人与腹腔镜手术治疗宫颈癌的病例对照研究文献[3⁃17]。文献来源包括 PubMed、Springer、Ovid、外文生物医学期刊全文数据库和中国生物医学文献数据库、中国学术期刊全文数据库、万方数据库。15篇文献中,中文文献6篇,英文文献9篇,共计1177例患者[其中达芬奇机器人手术组(RS组)620例,普通腹腔镜手术组(LS组)557例];前瞻性的队列研究4篇,回顾性的队列研究11篇。
1.1.2 纳入和排除标准 纳入标准:(1)已公开发表的文献,为对比机器人手术和普通腹腔镜手术用于宫颈癌的研究,语种限定为中文及英文;(2)术前已明确诊断为宫颈癌,有手术适应证无手术禁忌的患者;(3)实验组干预措施为使用机器人手术治疗,对照组对照措施为使用普通腹腔镜手术治疗,除研究因素外严格控制可能对结果产生影响的混杂因素如患者的年龄、体质指数等。(4)纳入文献中含有手术时间、出血量、住院时间、清扫淋巴结数量、并发症发生概率及拔除尿管时间所需观察结局指标。排除标准:(1)重复发表的文献;(2)病例报告、综述或存在设计缺陷的文献;(3)统计学方法错误或数据有缺陷的文献。
1.2 方法
1.2.1 文献检索方法 英文检索词:“robotic⁃assisted”“robot”“Davinci”“laparoscopy”“laparoscopic”“cervix”“cervical”“radical hysterectomy”,检索 PubMed、Springer、Ovid、外文生物医学期刊全文数据库,采用主题词+自由词联合检索。中文检索词:“机器人”“达芬奇”“计算机辅助”“腹腔镜”“宫颈癌”“宫颈恶性肿瘤”“宫颈癌根治术”,检索中国生物医学文献数据库、中国学术期刊全文数据库、万方数据库。
1.2.2 文献质量评估 采用Cochrane数据库提供的针对非随机研究偏倚评价工具Newcastle⁃Ottawa Scale(NOS)对纳入文献进行质量评估。队列研究的NOS评价标准包括研究对象选择4个条目(4分),组间可比性1个条目(2分)和结果测量3个条目(3分),共计9分。
1.3 统计学处理 采用Cochrane数据库提供的Rev-Man5.3软件进行meta分析。连续性变量采用加权均数差(WMD)95%CI表示,采用χ2检验定性分析各入选研究间的统计学异质性,用I2值对统计学异质性进行定量评价。若纳入研究之间具有同质性(P>0.10,I2≤50%),则使用固定效应模拟计算合并统计量;若纳入研究之间存在异质性(P≤0.10,I2>50%),则先分析导致异质性的原因,排除异质性的因素后使用随机效应模型计算合并统计量。
2 结 果
2.1 文献检索结果 纳入文献在NOS量表中评分5分以上,均为高质量文献,见表1。
2.2 RS组和LS组围手术期相关指标的meta分析结果
2.2.1 手术时间 共纳入14篇文献,共1058例患者,其中RS组547例,LS组511例。结果显示,各项研究之间存在统计学异质性(P<0.00001,I2=93%);排除异质性的因素后使用随机效应模型计算合并统计量,结果显示,RS组手术时间要比LS组长(WMD=36.20,95%CI:30.93~41.47)。见表 2、图 1。
2.2.2 术中出血量 共纳入12篇文献,共857例患者,其中RS组464例,LS组393例。结果显示中,各项研究之间存在统计学异质性(P<0.00001,I2=92%);排除异质性的因素后使用随机效应模型计算合并统计量,结果显示,RS组术中出血量要明显比LS组少(WMD=-41.86,95%CI:-49.28~-34.45)。见表 3 及图 2。
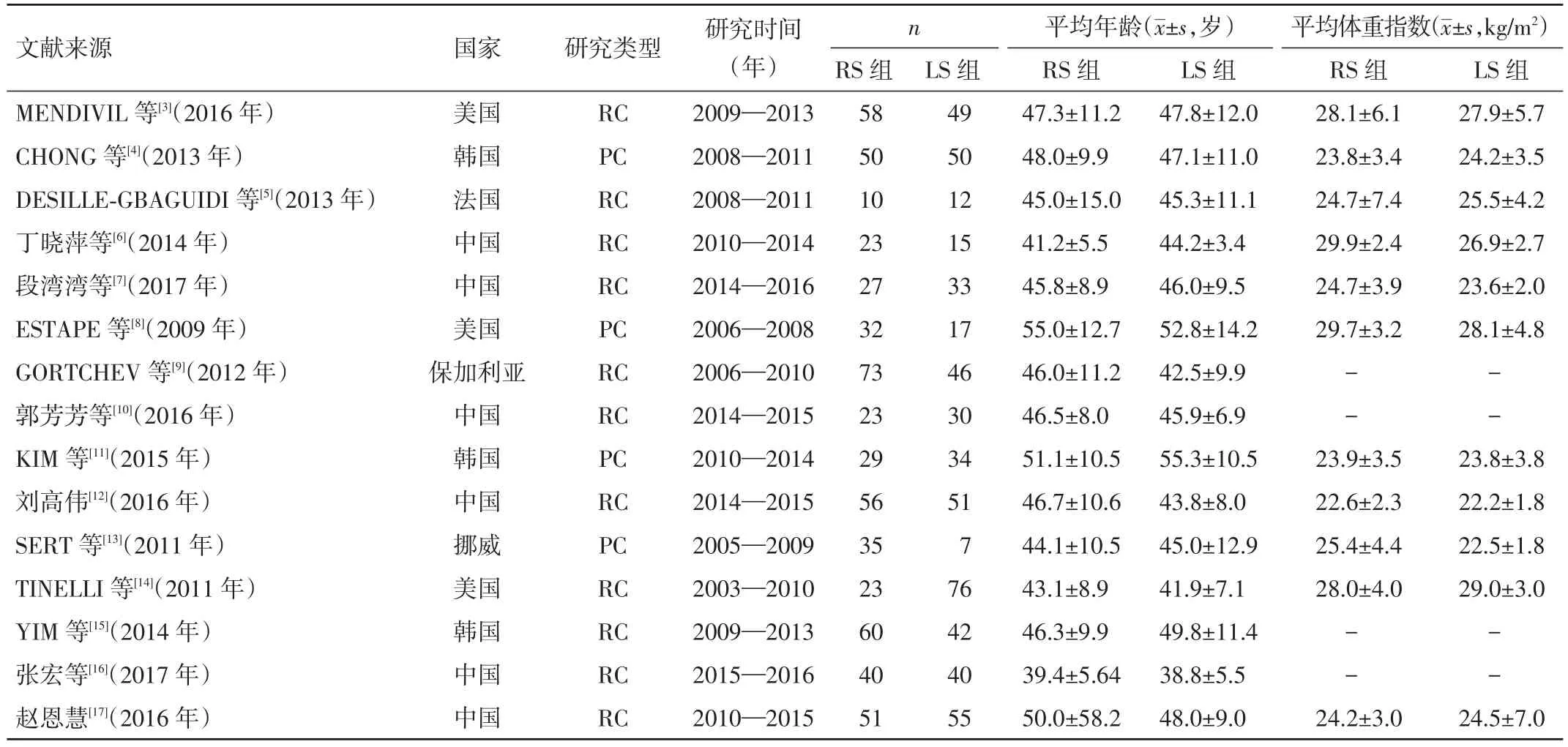
表1 纳入文献的原始资料
2.2.3 住院时间 共纳入10篇文献,共789例患者,其中RS组392例,LS组397例。结果显示各项研究之间存在统计学异质性(P=0.00400,I2=63%);排除异质性的因素后使用随机效应模型计算合并统计量,结果显示,RS组住院时间要比LS组短(WMD=-0.97,95%CI:-1.33~-0.61)。见表 4 及图 3。
图1 机器人手术对围手术期手术时间的影响
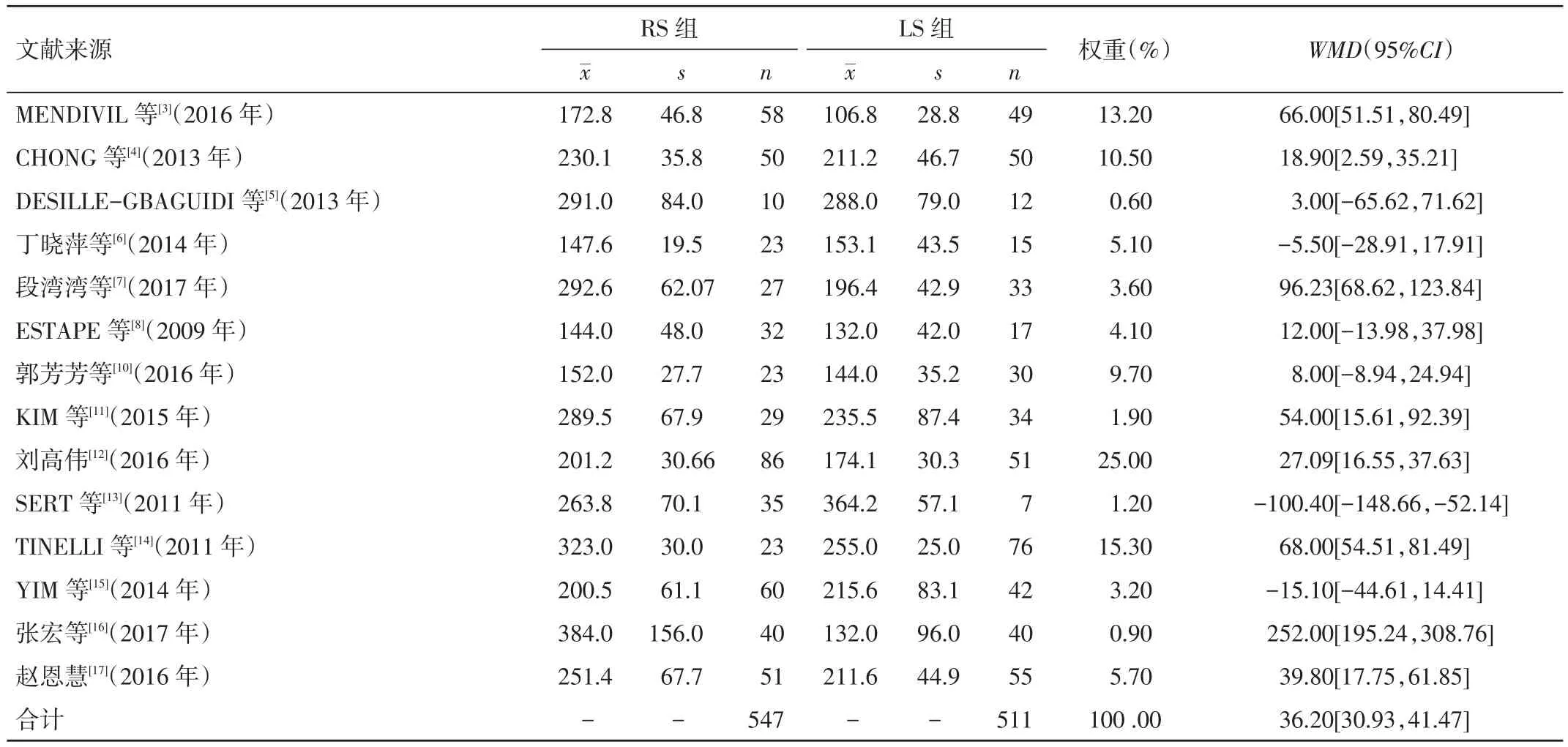
表2 机器人手术对围手术期手术时间的影响
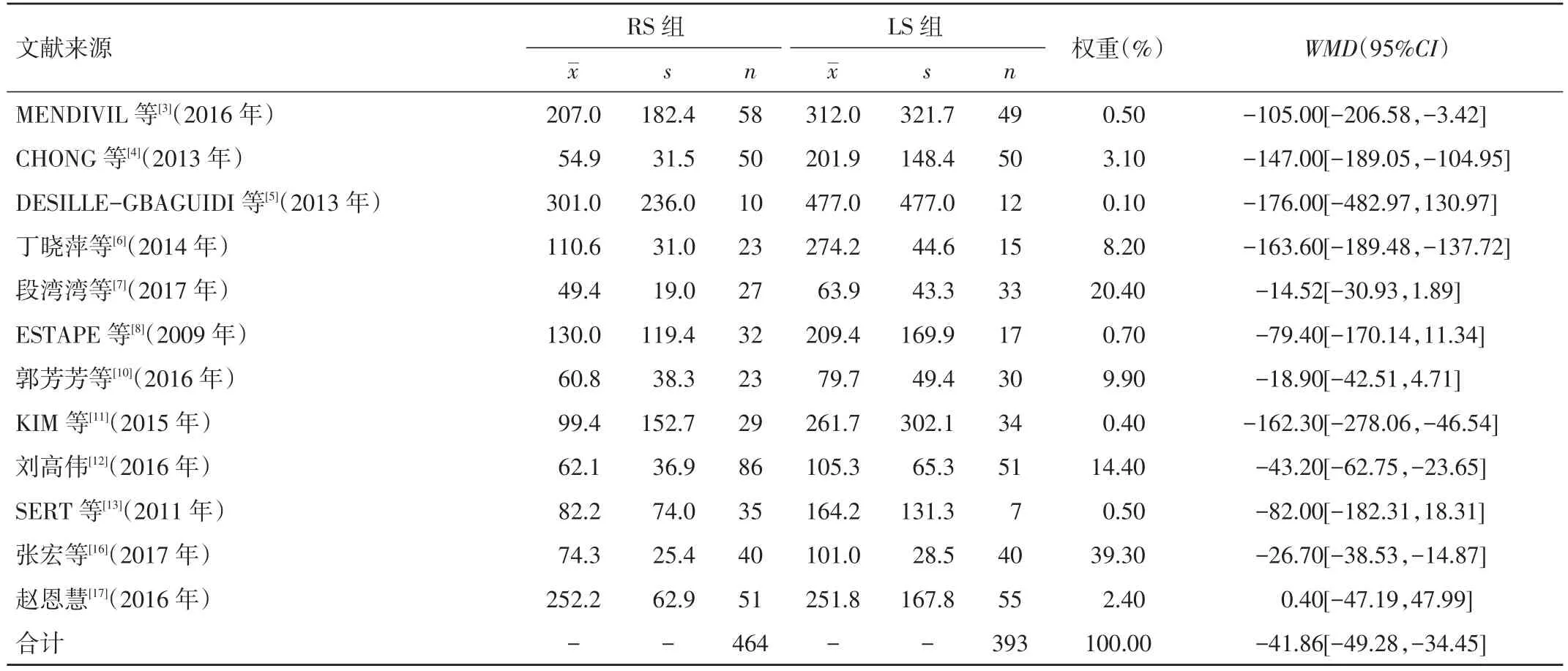
表3 机器人手术对术中出血量的影响
2.2.5 清除淋巴结数量 共纳入14篇文献,共1097例患者,其中RS组580例,LS组517例。结果显示,各项研究之间存在统计学异质性(P<0.00001,I2=80%);排除异质性的因素后使用随机效应模型计算合并统计量,结果显示,RS组清除淋巴结数量要比LS组多(WMD=1.35,95%CI:0.58~2.11)。见表 5 及图 4。

图2 机器人手术对术中出血量的影响
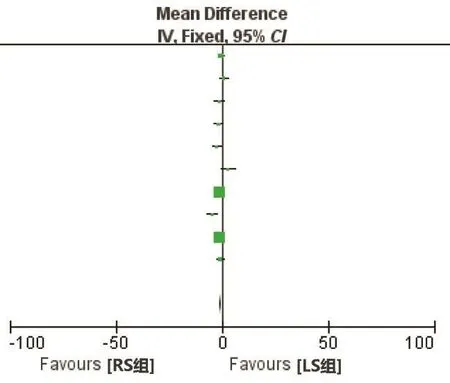
图3 机器人手术对住院时间的影响
2.2.6 并发症 共纳入11篇文献,共923例患者,其中RS组524例,LS组399例。结果显示,各项研究之间存在统计学异质性(P=0.05000,I2=45%);排除异质性的因素后使用随机效应模型计算合并统计量,结果显示,RS组并发症发生率LS组小[比值比(OR)=0.61,95%CI:0.42~0.89]。见表 6 及图 5。
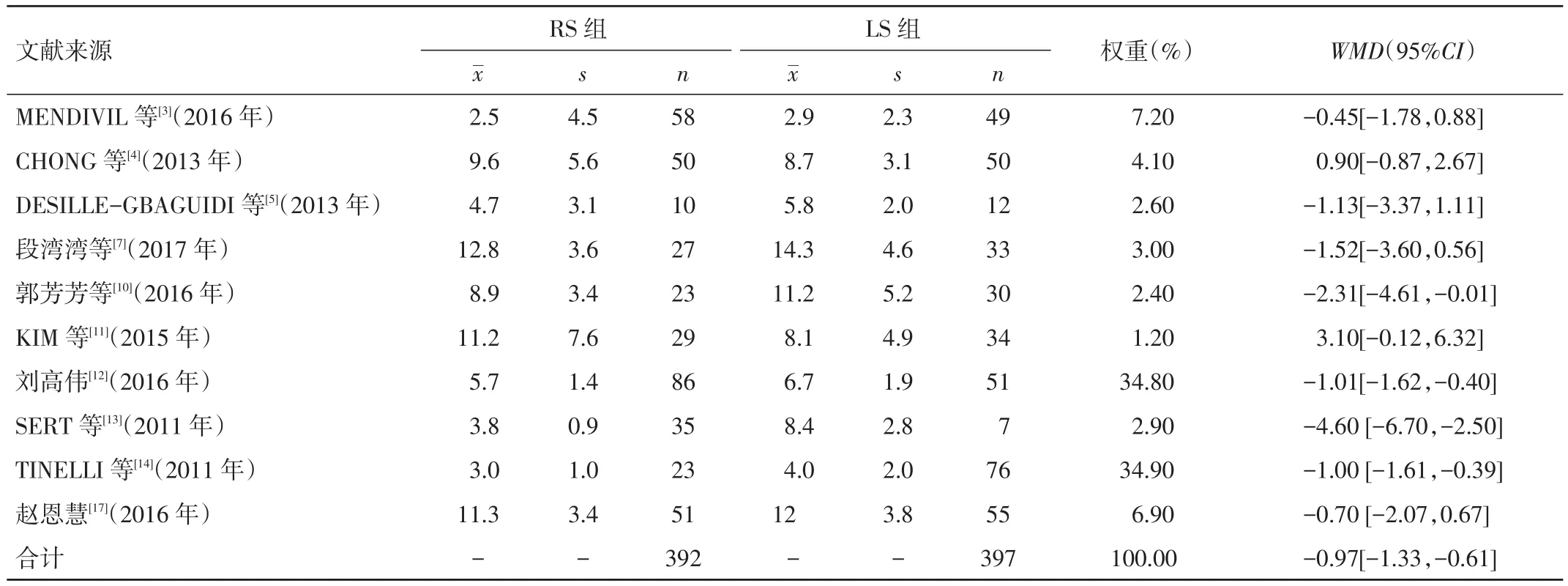
表4 机器人手术对住院时间的影响

表5 机器人手术对清除淋巴结数量的影响
2.2.7 拔除尿管时间 共纳入6篇文献,共519例患者,其中RS组266例,LS组253例。结果显示,各项研究之间不存在统计学异质性(P=0.17000,I2=35%);故采用固定效应模拟计算合并统计量,结果显示,差异无统计学(OR=-0.52,95%CI:-1.50~0.46)。见表 7 及图 6。
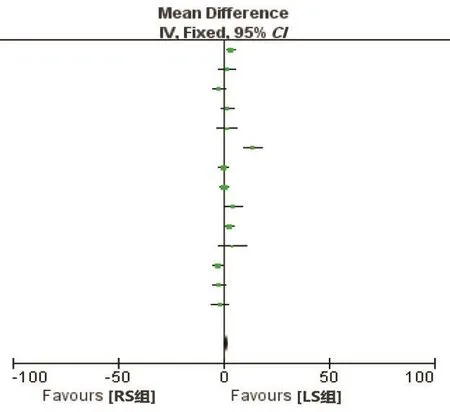
图4 机器人手术对清除淋巴结数量的影响

图5 机器人手术对并发症的影响
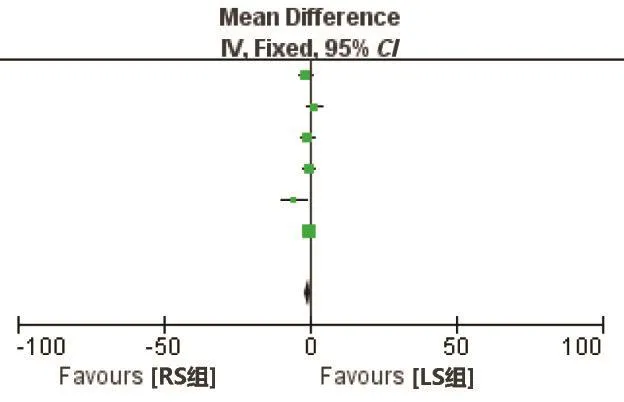
图6 机器人手术对拔除尿管时间的影响
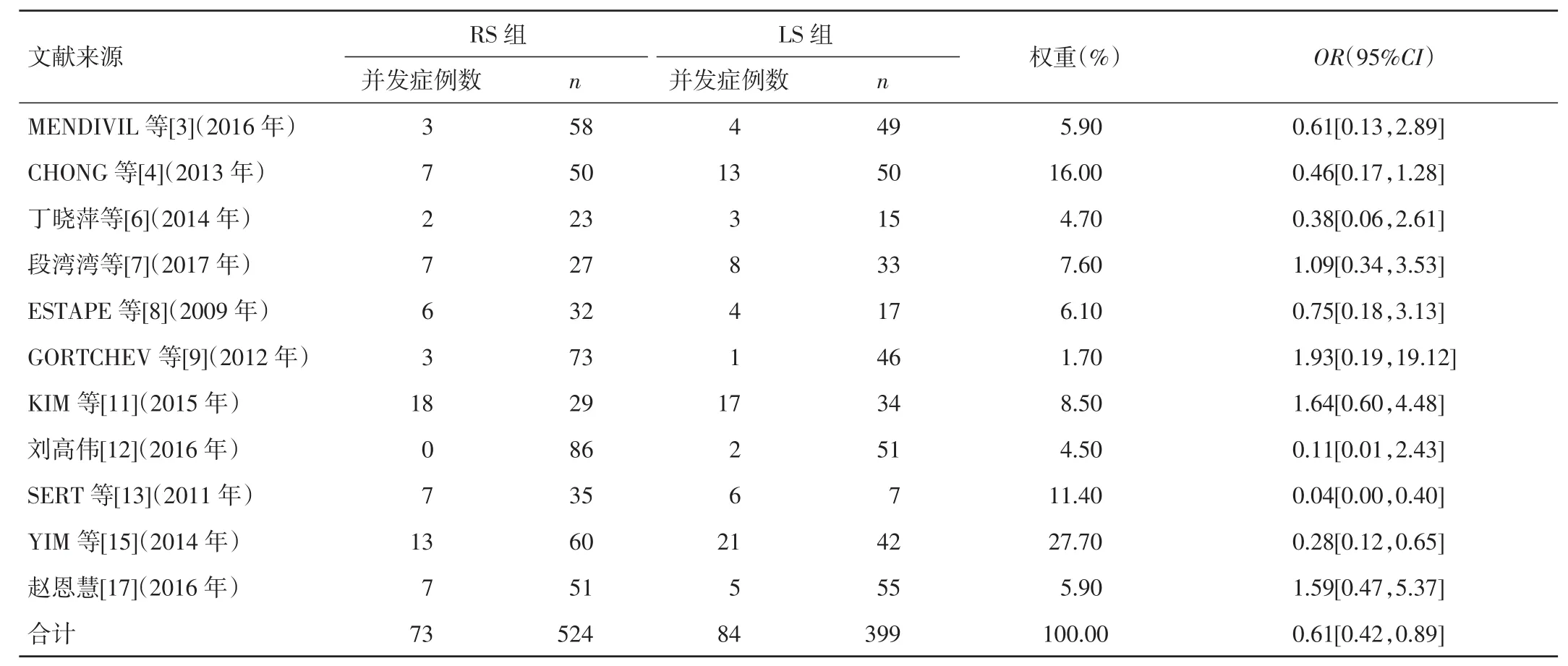
表6 机器人手术对并发症的影响
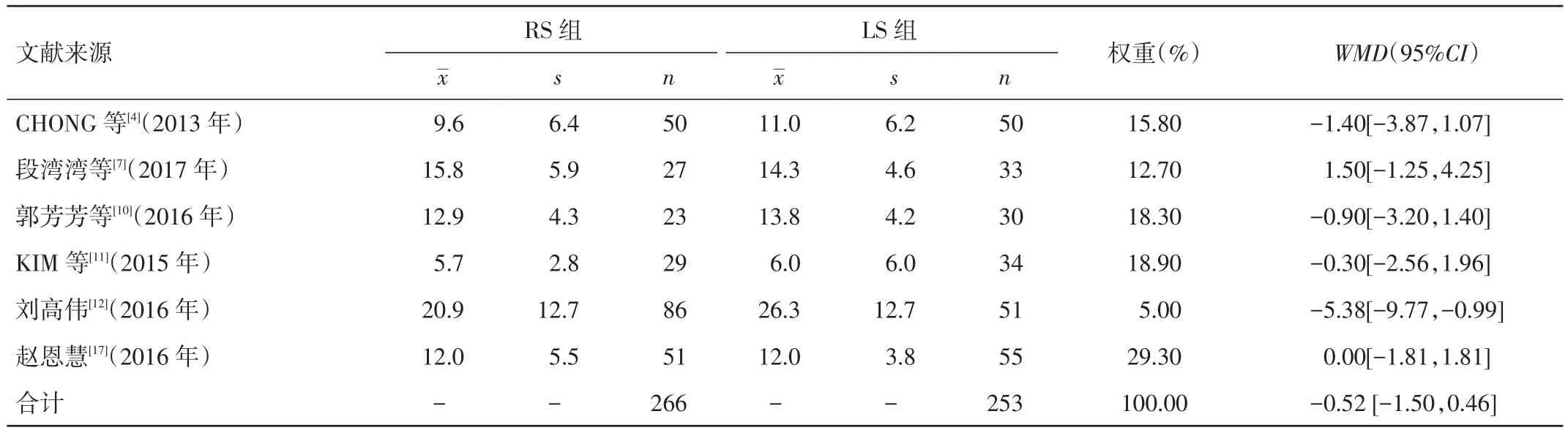
表7 表机器人手术对拔除尿管时间的影响
3 讨 论
按国际妇产科联盟的临床分期标准(2009年),宫颈癌可分为Ⅰ、Ⅱ、Ⅲ、Ⅳ期。Ⅰa~Ⅱa期宫颈癌患者的治疗方式一般以手术治疗为主,Ⅱb期患者可以在有效的新辅助化疗后行根治术式[18]。目前,宫颈癌的手术方法有经腹、经阴道、普通腹腔镜及机器人手术4种。达芬奇机器人手术系统是目前临床上唯一通过美国食品和药品管理局批准的机器人手术系统,主要由3部分组成,包括操作平台、手术机械臂系统及图像处理系统,能够提供高分辨率、放大的三维立体视觉,其配备的EndoWrist腹腔镜器械能够模仿人手腕动作,甚至超过人类手腕的灵活度及活动度,能够精确完成切割、分离、缝合和打结等手术步骤,可以过滤人手的抖动,控制力超过人手。目前,达芬奇机器人手术系统已被应用于子宫切除术、子宫肌瘤剔除术、盆底手术、广泛性全子宫切除术和盆腹腔淋巴清扫术等。
本研究结果显示,机器人手术时间普遍比腹腔镜手术时间长,其主要原因可能是因为机器人手术的准备时间相对较长,装机、准备时间较长也是机器人手术的缺陷。在住院时间方面,机器人手术住院时间比腹腔镜手术短,其可能跟机器人手术操作相对灵活、精细、可控有关。在清扫淋巴结个数方面,机器人手术清扫数量比腹腔镜手术多,这可能与机器人手术视野放大更精清晰,手术操作更加精细、灵活有关,使得清扫淋巴结更加彻底。机器人手术术中出血量要明显比普通腹腔镜少,这可能跟机器人手术视野更加清晰,扫做更加精细、柔和、可控有关,因此降低了破坏重大血管的可能。而且,机器人手术并发症发生概率要比普通腹腔镜少,这可能跟跟机器人手术操作更加精细有关。但是,在拔除尿管时间方面,机器人手术和腹腔镜手术差异不明显,这可能与拔除尿管时间无法完全反应膀胱恢复情况,以及不同医院拔除尿管指标时间不同有关。
综上所述,采用机器人手术治疗宫颈癌是安全、有效的,其与腹腔镜手术比较,手术时间稍长,出血量明显少,住院时间短,清除淋巴结数量多,并发症发生概率小。但机器人系统本身仍存在一些局限性:相对普通腹腔镜器械所具有的各类电外科和超声器械,机器人手术器械仍较单一,功能也有待进一步改善;机器人手术系统仍较庞大,需要进一步小型化;机器人手术系统的购买及维修费用昂贵,从而导致机器人手术费用较开腹手术和腹腔镜手术高。这些局限性导致机器人手术难以普遍推广和应用。因此,仍需继续进一步完善机器人系统。机器人妇科手术必将取代普通腹腔镜及开腹手术,成为新一代的妇科手术主流技术。
