静态横向补给高架索几何形状的可视化仿真
2018-11-29伦伟成侯洪涛
李 群,伦伟成,侯洪涛,梅 珊
静态横向补给高架索几何形状的可视化仿真
李 群,伦伟成,侯洪涛,梅 珊
(国防科技大学系统工程学院,长沙 410073)
以高架索作为承重索道的横向补给是非常普遍的一类海上干货补给方式,然而目前学术界尚无对高架索进行可视化仿真建模的支撑性研究,针对这一现状,提出一种直观反映海上横向干货补给过程中高架索几何形状变化的仿真模型.仿真模型由算法模块和动画模块两部分构成,二者互相影响互相调用.算法模块的建立以高架索在补给过程中的受力情况为基础,按照高架索所受荷载的不同类型将其细分为分布荷载作用下的算法模块和集中荷载作用下的算法模块两大类来分别建模:前者适用于架设、稳定、调整、卸货、撤回等5个补给阶段,使用经典成熟的悬索计算的抛物线理论来推导各阶段中高架索的相关物理性质的代数表达式,如形状曲线方程、长度、发送端张力和接收端张力等;后者对应运货阶段,使用结构力学理论来完成相关表达式的推导.动画模块的建模运用了Unity软件,依托建模工具的功能特性和相关素材来模拟真实的补给场景.这种仿真模型将定性描述与定量分析相结合、可视化仿真模型与理论仿真模型相结合,既能够演示高架索的几何形状在补给过程中所发生的变化,又能够实时更新相关物理性质的数值或表达式.模型运行结果表明,仿真模型基本可以如实反映高架索的几何形状与其若干物理性质随着补给的推进而变化的过程.
横向补给;悬索计算;高架索;可视化仿真
横向补给是许多国家海军普遍采用的海上干货补给方式,指补给船和接收船以同向同速横列编队航行,通过在两船间架设索道来直接传输各种干货(包括弹药食物等)[1].其中,最常用的索道是高架索,这是一种由高强度钢材制成的兼具高柔韧性的缆索.由于高架索的动静态特性决定了补给系统的安全性和稳定性[2],建立高架索模型来研究这些特性的变化情况成为海上补给的重要研究对象.
在关于高架索的研究中,李楠等[3-6]在高架索多刚体动力学模型仿真研究的基础上,利用多体动力学理论先后建立了高架索的刚柔混合体动力学模型和多柔体动力学模型,以及基于柔性化绳索单元的多柔体动力学模型.不过这些模型只能用来在理论层面上研究高架索的一些力学特性,并不能直观演示高架索在补给过程中究竟发生了怎样的变化.
Wan等[7]提出的基于体积有限元方法的柔性绳索模型,以及谢海波等[8]提出的基于质点弹簧系统的绳索仿真算法,虽然可以一定程度上模拟绳索形态,但应用范围有限,难以直接推广到高架索建模.
可见目前在高架索模型研究领域,较少涉及可视化仿真建模;而在绳索可视化模型研究领域,也罕以高架索为研究对象.此外,在技术上也没有可直接用于高架索可视化仿真的专业插件或软件,需要使用者根据实际需要自行开发.因此,本文提出一种反映横向补给全阶段中高架索形状变化的仿真模型,使之既能描述高架索的相关物理性质,又能展现高架索的形变过程.
1 模型概述
本文选取静态条件下的横向干货补给过程作为模型背景.一般来说,在波浪作用下,补给船和接收船会发生摇荡运动,考虑船体摇荡运动对高架索诸力学特性所造成的影响属于高架索动力学的研究范畴,需要借助专业的力学分析软件以建立复杂庞大的模型和程序;反之则属于静力学[9].因本文侧重于探讨高架索在补给过程中的形状变化,而船体运动对高架索几何形状的影响有限,且并不会使其产生不符合静力学原理的变化,因而本文采用典型的静力学假 设——令补给船和接收船在补给过程中保持静止 状态.
横向干货补给过程可大致分为架设、稳定、调整、运货、卸货、撤回这6个阶段.为了贯彻“既真实展现高架索的形变过程,又实时显示高架索的相关物理性质”这一总原则,每个阶段的模型应满足以下几条针对性要求.
架设阶段的仿真模型要演示出高架索在牵引索的牵引下从发送船延伸至接收船的过程,并实时更新高架索与牵引索连接点的位置坐标和高架索在当前时刻的长度.撤回阶段的仿真模型则要演示相反的过程,并显示与架设阶段仿真模型相同的参数.
稳定阶段的仿真模型要演示出高架索架设固定之后在自身重力作用下所呈现的曲线形状,实时更新高架索的形状曲线方程、发送端(高架索与补给船的连接点)张力值、接收端(高架索与接收船的连接点)张力值和长度.
调整阶段的仿真模型要演示出高架索长度改变导致其几何形状随之改变的过程,并显示与稳定阶段仿真模型相同的参数.卸货阶段的仿真模型要演示出高架索接收端连同货物一起沿接收柱向下移动的过程,并显示与稳定阶段仿真模型相同的参数.
运货阶段的仿真模型要演示出高架索受货物的重力作用时所呈现出的几何形状,以及随着货物的移动,高架索形状动态变化的过程,并显示与稳定阶段仿真模型相同的参数.
为满足上述要求,仿真模型将由算法模块和动画模块组成,分别实现运算和演示.二者互相调用互相影响:算法模块的运算基于动画模块输入的参数值,其中的某些参数正是动画模块中一些元素的属性;动画模块则将算法模块的运算结果输出,并按照结果调整有关元素的属性值.
2 分布荷载作用下的算法模块
高架索在补给过程中受到两种不同类型的荷载,即集中荷载和分布荷载,集中荷载作用于运货阶段,分布荷载作用于其他所有阶段.下面将分别讨论这两种情况.

2.1 架设阶段和撤回阶段
高架索的架设是在牵引索引导下完成的,在这一阶段中,牵引索的一端连接着高架索的一端,带动它从补给船移动到接收船,撤回阶段则相反.这两个阶段中的高架索(粗线)与牵引索(细线)的位置关系和形状如图1所示.

图1 架设阶段及撤回阶段示意

2.2 稳定阶段
高架索架设完毕后、恒张力补偿系统启动前处于稳定阶段,此时高架索长度保持不变,受自身重力这一分布荷载的作用而自然下垂,按照经典的悬索计算的抛物线理论,假设分布荷载沿高架索跨度方向,其形状及位置关系如图2所示.
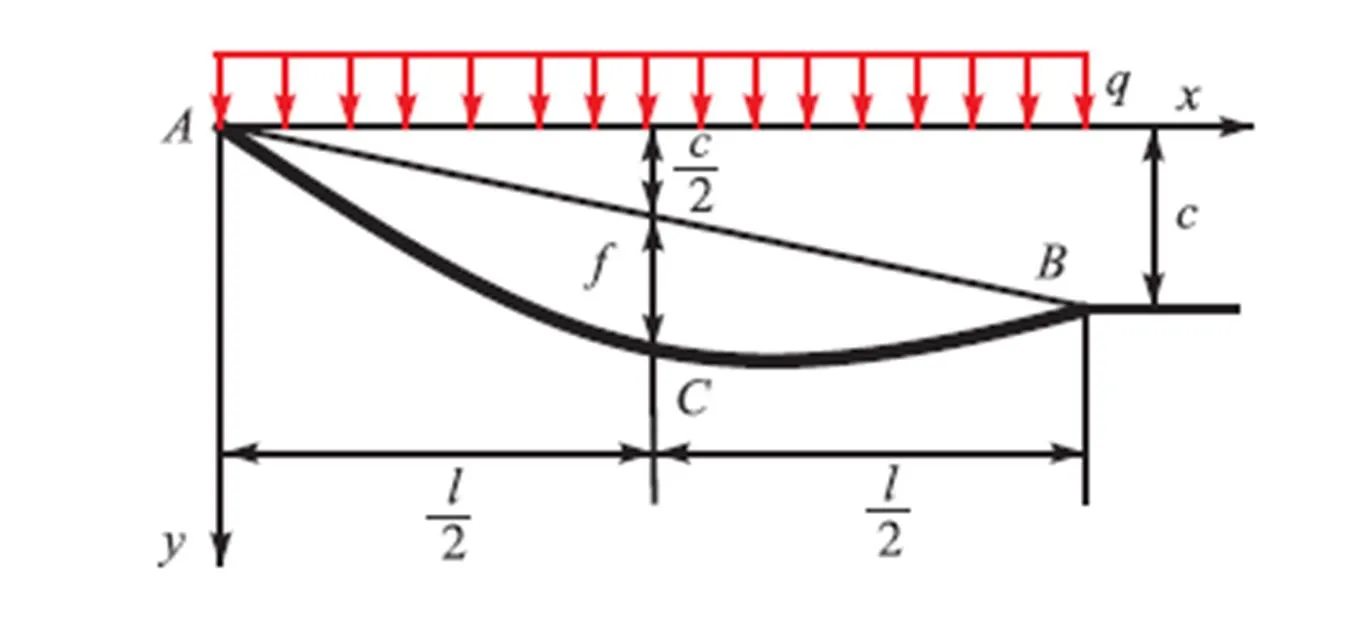
图2 稳定阶段示意

图2中高架索的形状曲线方程[10]为


因此,高架索的形状曲线方程还可以写成
对式(3)求导可得



将式(5)代入曲线弧长积分公式即可求出高架索的长度为


适当放宽精度要求,则式(10)等号右边取有限项可认为近似等于左边项.当取两项时,的表达式为


这一阶段算法模块的流程如图3所示.

图3 稳定阶段算法模块的流程
2.3 调整阶段和卸货阶段

这一阶段算法模块的流程如图4所示.
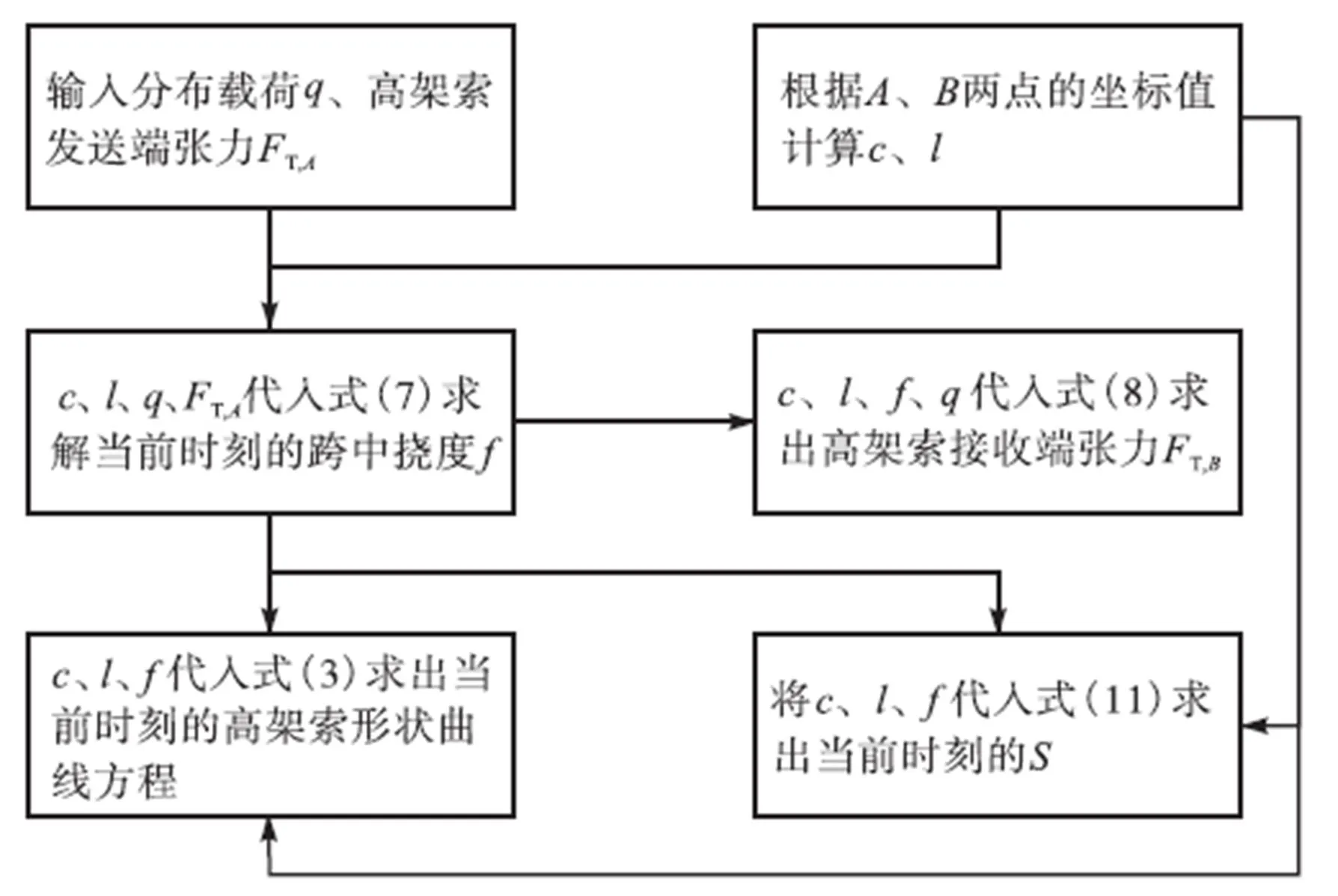
图4 调整阶段算法模块的流程
卸货阶段中,高架索接收端带动货物以一定的速度匀速下滑,除此之外高架索的受力情况与调整阶段完全一致,因此可采用相同的方法来推导卸货阶段的相关表达式和参数值并输出.
3 集中荷载作用下的算法模块
集中荷载作用于运货阶段,在这一阶段,货物在传送小车的带动下沿高架索从发送端移动到接收端.此时,重量远大于高架索自重的货物构成了作用于高架索上的集中荷载,使得相邻集中荷载作用点之间、集中荷载作用点与高架索端点之间的索段非常接近直线,根据结构力学知识,可以将各索段作为直线处理[10],从而推导高架索的相关力学特性.
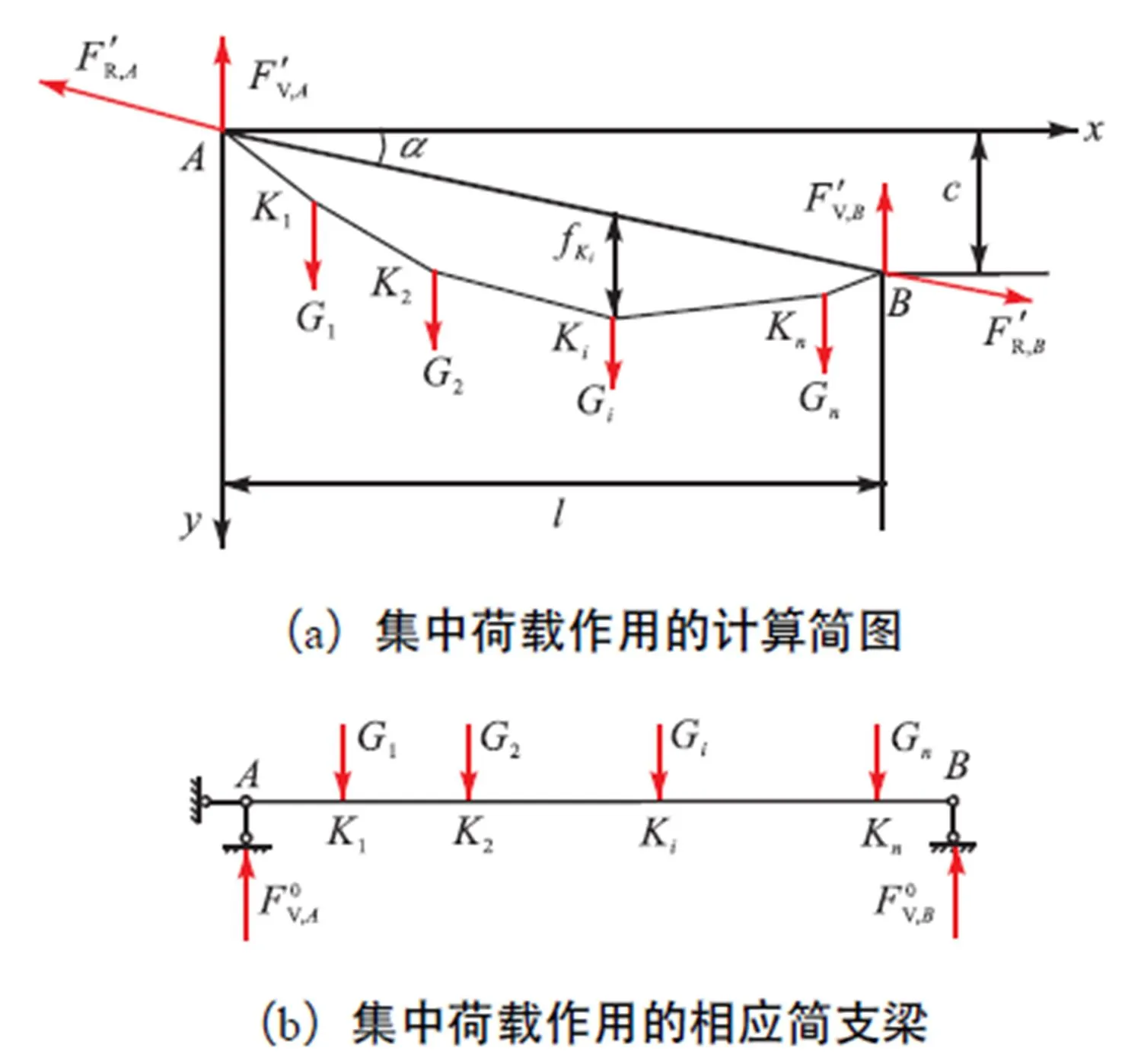
图5 运货阶段示意
图5中参数及其含义如下所述.
根据图5(a)所示的几何关系可以得

在平衡状态下,图5中力的关系为


基于式(16)可得

根据图5(b)所示之力的关系又可知





将相邻两个点的坐标代入两点间距离公式可求出这一段高架索的长度,所有长度累加即为高架索的总长度,即
这一阶段算法模块的流程如图6所示.
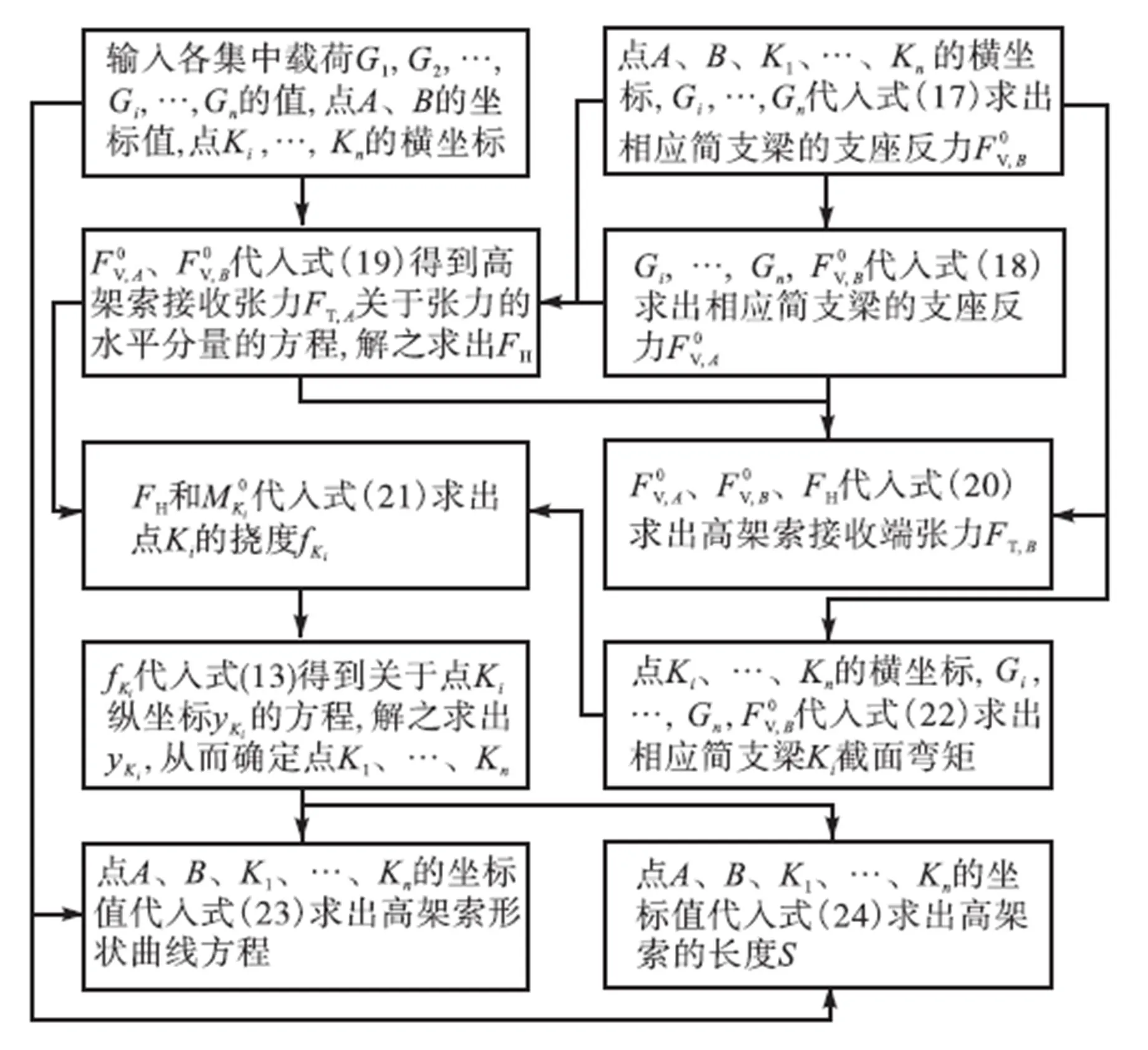
图6 运货阶段的算法逻辑流程
4 建模过程及结果
4.1 动画模块概述
动画模块由演示补给过程的场景和显示物理性质结果的用户图形界面组成,场景中的实体元素来自各种补给设备和装置的3D模型,其中最重要的高架索模型还需结合各补给阶段的具体情境来附加相应的建模脚本和控制脚本或设置组件值.使用Unity软件建立各补给阶段的动画模块,并使用Unity自带的MonoDevelop编辑器编写算法模块和动画模块所需的脚本,程序语言为C#.
4.2 模型运行效果
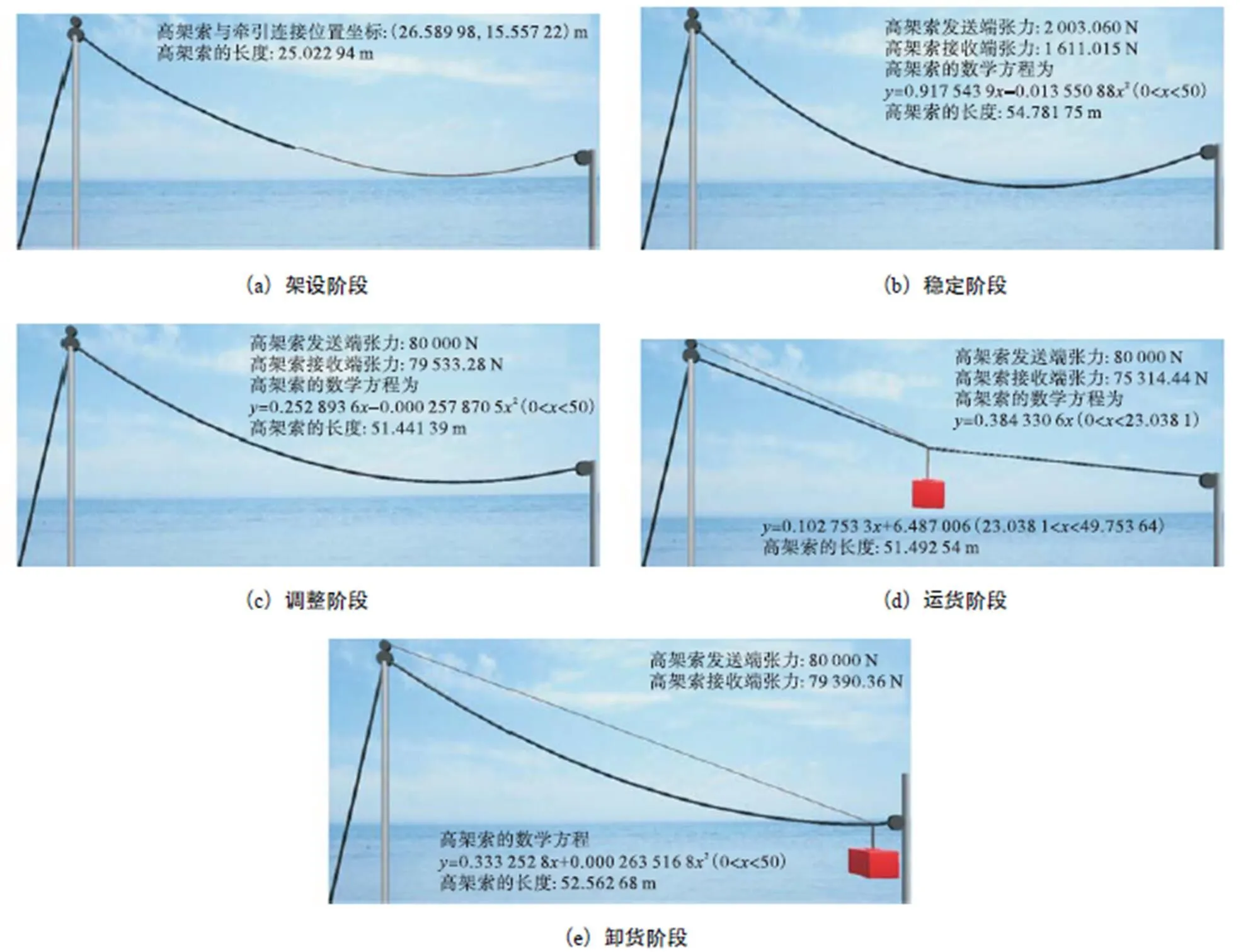
图7 仿真模型效果图
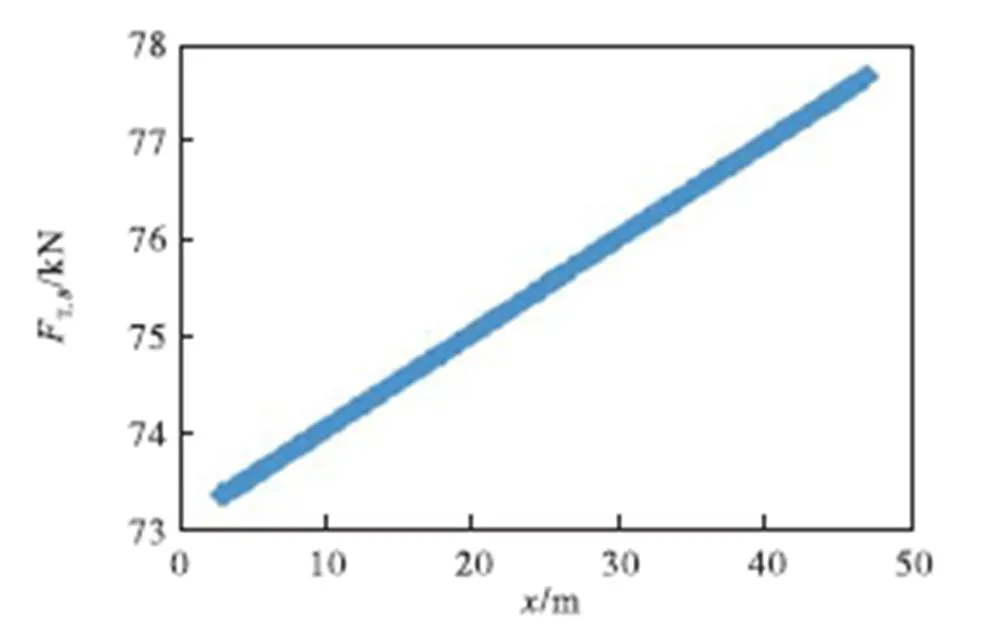
图8 接收端张力与货物位置关系
5 结 语
本文提出了一种反映海上横向干货补给过程中高架索几何形状变化的仿真模型.该模型以各补给阶段中高架索的受力情况为依据,运用抛物线理论和结构力学理论,充分结合所使用的建模工具——Unity软件的功能特性.在功能上,该模型既全景展示了高架索的几何形状在整个补给过程中发生了怎样的变化,又将高架索的形状曲线方程以及长度、发送端与接收端张力等物理性质实时输出,实现对补给过程中的高架索同时进行定性分析与定量分析.运行结果显示,该模型基本可以如实完整地反映全补给阶段中高架索形状与相关物理性质发生的变化,因而可被用于辅助操作人员从全局角度把握补给过程,使其更好地了解熟悉操作流程,以达到训练目的.
[1] 赵 伟,赵厚宽,王 岩. 海上航行横向补给高架索恒张力系统动态性能仿真[J]. 船舶工程,2013,35(2):55-58.
Zhao Wei,Zhao Houkuan,Wang Yan. Dynamic performance simulation of underway replenishment at sea highline constant tensile control system[J].,2013,35(2):55-58(in Chinese).
[2] 张大朋,朱克强,白 勇,等. 海上横向补给高架索系统动力学响应研究[J]. 船舶工程,2017,39(1):59-63.
Zhang Dapeng,Zhu Keqiang,Bai Yong,et al. Dynamic analysis of marine alongside replenishment for highline cable system[J].,2017,39(1):59-63(in Chinese).
[3] 李 楠,韦灼彬,何学军,等. 高架索的多体动力学模型[J]. 海军工程大学学报,2014,26(6):27-31.
Li Nan,Wei Zhoubin,He Xuejun,et al. Multibody dynamics model of highline cable[J].,2014,26(6):27-31(in Chinese).
[4] 李 楠,韦灼彬,何学军,等. 海上补给高架索刚柔混合动力学模型[J]. 海军工程大学学报,2016,28(2):15-19.
Li Nan,Wei Zhuobin,He Xuejun,et al. Rigid-flexible dynamic model of highline cable[J].,2016,28(2):15-19(in Chinese).
[5] 李 楠,韦灼彬,张世云,等. 海上补给高架索建模和仿真研究[J]. 兵工学报,2016,37(4):735-743.
Li Nan,Wei Zhuobin,Zhang Shiyun,et al. Modelling and simulation of highline cable for replenishment at sea[J].,2016,37(4):735-743(in Chinese).
[6] 李 楠,韦灼彬,何学军,等. 海上补给高架索多柔体动力学模型[J]. 海军工程大学学报,2018,30(1):22-27.
Li Nan,Wei Zhuobin,He Xuejun,et al. Research on muti-flexible dynamic model of highline cable of alongside replenishment at sea[J].,2018,30(1):22-27(in Chinese).
[7] Wan Taoruan,Tang Wen,Huang Dongjin. Real-time simulation of long thin flexible objects in interactive virtual environments[C]//18. New York,USA,2012:85-92.
[8] 谢海波,谭晓兰,甘 亮. 基于质量弹簧系统的实时绳索仿真方法[J]. 暨南大学学报:自然科学版,2013,34(5):479-482.
Xie Haibo,Tan Xiaolan,Gan Liang. Real time simulation for rope based on mass spring system method[J].:,2013,34(5):479-482(in Chinese).
[9] 马仁刚,张良欣,何学军. 横向干货补给系统高架索的静力学分析[J]. 舰船科学技术,2012,34(2):47-49.
Ma Rengang,Zhang Liangxin,He Xuejun. Analysis the static influence of highline cable alongside replenishment for dry cargo[J].,2012,34(2):47-49(in Chinese).
[10] 李廉锟. 结构力学[M]. 6版. 北京:高等教育出版社,2017.
Li Liankun.[M]. 6th ed. Beijing:Higher Education Press,2017(in Chinese).
[11] 任爱娣,张良欣,何学军. 高架索索道系统研究中的恒张力假设[J]. 舰船科学技术,2010,32(2):27-31.
Ren Aidi,Zhang Liangxin,He Xuejun. Constant stress consumption in the research of highline system[J].,2010,32(2):27-31(in Chinese).
[12] 何学军,张良欣,任爱娣. 海上横向补给系统高架索参数影响分析[J]. 海军工程大学学报,2009,21(5):52-56.
He Xuejun,Zhang Liangxin,Ren Aidi. Influence of parameters for highline cable of maritime alongside replenishment system[J].,2009,21(5):52-56(in Chinese).
Visual Simulation of the Shape of Highline Cable in Static Lateral Replenishment
Li Qun,Lun Weicheng,Hou Hongtao,Mei Shan
(College of Systems Engineering,National University of Defense Technology,Changsha 410073,China)
Lateral replenishment in which a highline cable acts as load-bearing cableway is a widely used method of replenishment at sea for solid cargo. However, research on visual simulation modeling of the highline cable is lacking. Therefore, a type of simulation model that visually demonstrates how the shape of the highline cable changes in the process of lateral replenishment at sea for solid cargo is proposed. The simulation model is composed of algorithmic and animatic modules, which may mutually affect and call each other. The algorithmic module is based on forces exerted on the highline cable and can be divided according to the kind of load applied to the highline cable into an algorithmic module for the action of distributed load and concentrated load. The algorithmic module for the action of distributed load deduces the mathematical expressions of some physical properties, such as shape equation, length, and tension of the sending and receiving extremities of the highline cable using the parabola theory of a hanging rope applied to the replenishment stages of erection, stabilization, adjustment, unloading, and withdrawal. The algorithmic module for the action of concentrated load deduces such mathematical expressions using the theory of structural mechanics applied to the replenishment stage of delivery. The animatic module is built using Unity software that simulates actual replenishment scenes via the functions of Unity and available materials. This kind of model links qualitative description with quantitative analysis and combines the visual simulation model with the theoretical simulation model to represent the changes that the shape of the highline cable undergo in the course of replenishment and simultaneously determine the values or equations of such physical properties in real time. The outcomes of executions indicate that this simulation model is capable of demonstrating the changes that the shape and some physical properties of the highline cable undergo with replenishment in detail.
lateral replenishment;calculation of hanging rope;highline cable;visualization simulation
10.11784/tdxbz201801051
TP391.9
A
0493-2137(2018)12-1321-07
2018-01-08;
2018-09-24.
李 群(1971—),男,教授.
李 群,liqun@nudt.edu.cn.
国家自然科学基金资助项目(71373282).
the National Natural Science Foundation of China(No. 71373282).
(责任编辑:孙立华)