基于嵌入式技术的某型舟桥状态监测系统研究
2018-11-28文建祥鲁吉林雷增宏
文建祥, 彭 川, 鲁吉林, 雷增宏
(1.陆军工程大学, 江苏 南京 210007; 2.中国人民解放军31605部队, 江苏 南京 211122;3.中国人民解放军69006部队, 新疆 乌鲁木齐 830001)
引言
随着机械化、信息化进程在舟桥装备中的推进,液压与电控技术等广泛应用于舟桥装备。舟桥装备在向着强大的保障能力、快速的机动能力、便捷的作业能力、良好的适应能力、较强的生存能力方向发展的同时,装备的复杂化程度不断提高,其本身的技术保障问题日显突出。
舟桥装备属于结构复杂的机、电、液综合系统,在舟桥装备中应用嵌入式状态监测与故障诊断技术,可有效地将技术保障考虑纳入装备的全寿命过程,在装备的设计、研制、试验、使用过程中获取装备的技术保障资源,实现装备运行状态的实时监测,通过对状态参数的处理、分析,确定系统整体或局部是否正常,以便提前发现故障,查明原因并掌握故障发展趋势,最终实现装备运行状态的主动控制,达到主动预防性维修的目的,大大缩短其故障停机时间,有效提高装备的可靠性和可维护性,保证装备的战备完好率和任务完成率,为舟桥装备的使用维护提供一种低费用、高效率的主动预防性技术保障手段,不仅平时可为工厂生产和部队维修提供故障原因判别和界定方法,更可在战时极大地提高装备的抢修速度,提高装备的综合作战能力,以获得明显的经济效益和军事效益。
本文将嵌入式技术、虚拟仪器技术应用于某型舟桥的状态监测系统中,对其故障进行在线监测和离线分析,可为我军舟桥装备状态监测与故障诊断提供一种低费用、高效率的主动预防性维修技术保障手段,实现舟桥装备实时状态监测、故障报警与故障诊断等,为舟桥装备的状态监测与故障诊断提供技术支持。
1 嵌入式状态监测与故障诊断系统总体技术方案
1.1 功能要求
1.1.1 状态监测要求
对桥脚动力舟进行状态监测时,首先应选取监测对象。监测对象是在装备出现故障后能否快速定位故障部位及顺利完成故障维修的直接反映。监测对象的选择分析较为复杂,必须选取具有代表性且与其他部件联系较为密切的对象,对这些对象的运行状态参数进行实时监测,获取桥脚动力舟的工作状态。根据GZQ240型重型舟桥桥脚动力舟使用技术状态监测需求,结合故障监测与诊断的相关知识理论,最终选取监测对象为:液压系统各回路与电控操作系统。
1.1.2 模块设计
故障诊断部分也是本项目系统设计的重要部分,要求能够针对不同故障形式,利用采集的数据及人机对话结合相应的故障诊断方法准确地判断出故障部位,并给出相应的维修措施,指导维修保障人员进行故障的排除和设备的维修。
系统分为自主检测和故障现象检测两种模式,维修保障人员可以在相应的回路中查找故障原因,也可以选择通过常见故障现象进行故障检测。
1.2 系统总体方案
嵌入式状态监测与故障诊断系统是一个集信号采集、工况分析、状态显示以及故障诊断为一体的多任务信息处理系统,为了解决状态监测和故障诊断中多任务与实时性的矛盾,整个系统由状态监测和故障诊断两个子系统组成,其中一个子系统完成液压系统状态实时监测功能,后一个系统完成故障诊断功能。单片机系统是最常用的现场随机实时数据采集系统,其优点是结构简单,价格低廉,技术上容易掌握,且系统具有扩展能力。
按照模块化的设计思想,采用“技术状态信息采集(传感器)→信号处理(A/D转换及处理)→中央逻辑运算与技术状态鉴别→故障分析与诊断→技术信息查询→故障定位”的系统方案,系统方案如图1所示,系统分为上、下位机两个部分。
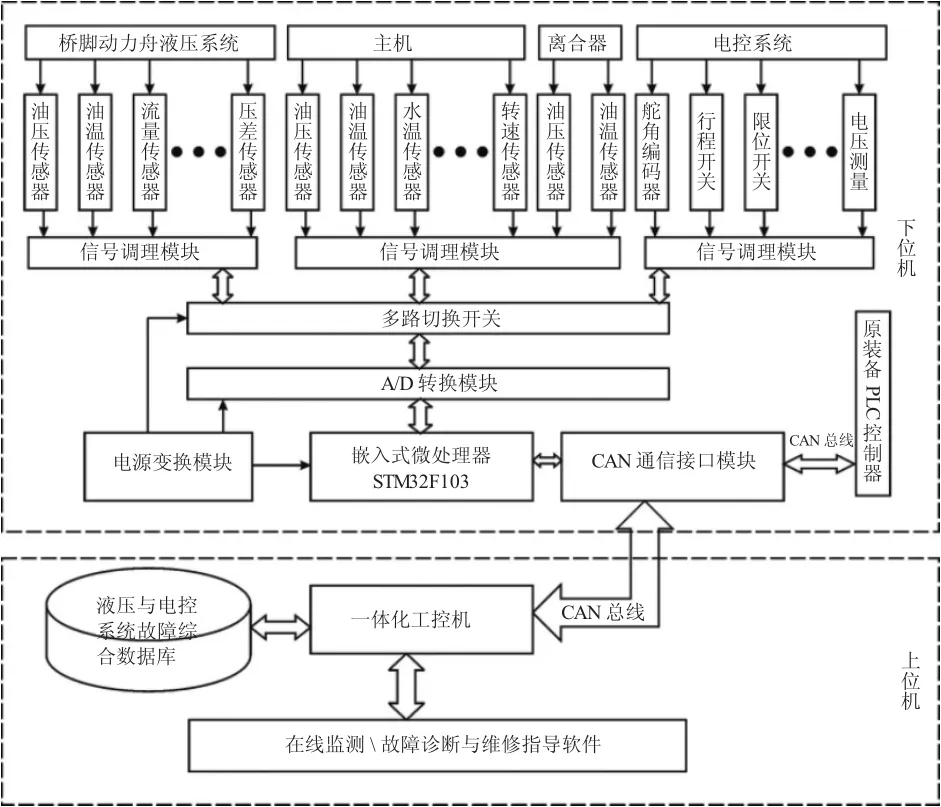
图1 系统方案设计框图
其中,下位机由单片机配以相应的传感器以及采集电路等组成,主要完成现场信号的采集和信号滤波、放大等预处理。
上位机的核心部件是嵌入式处理器,负责进行数据交换和处理、分析和协调,监测各个传感器参数以及自动报警等功能,用于对下位机信号采集处理系统采集的信号进行数据处理,进而通过数据对比进行故障定位、故障查询以及故障维修指导等。
2 硬件平台设计
2.1 硬件平台结构设计
硬件系统主要包括上位机和下位机两部分。其中,上位机以嵌入式系统为核心,负责工况分析、状态显示以及故障诊断等任务,为一体的多任务信息处理系统。为了解决状态监测和故障诊断中多任务与实时性的矛盾,整个系统由状态监测和故障诊断两个子系统组成,其中下位机完成系统状态实时监测功能,上位机完成工况分析、状态显示以及故障诊断等功能。上位机以嵌入式工控机软硬件系统为核心进行开发,下位机基于单片机、数据采集技术、嵌入式技术和传感器技术,结合驱动软件和嵌入式软件系统开发技术进行系统设计,包括硬件技术方案、硬件零部件的选型、硬件驱动程序的开发与仿真调试等,根据下位机的技术方案,可以完成信号的采集以及预处理和在线监控等。
2.2 上位机硬件系统研制
2.2.1 工控机的选型
根据舟桥装备状态监测的要求,选用X86系列的PM-PV-N455模块。该模块支持Windows XP SP3操作系统,满足设计和使用要求。
2.2.2 电源模块的选型与电路设计
状态监测与故障诊断系统的电源模块为上位机、下位机提供电源。由于数据精度高、外部干扰强,选择电源模块型号的主要要求是稳定可靠,在稳定可靠的基础上选择宽压输入范围的电源模块可以提高状态监测系统的稳定性、可靠性和适应性,在各种条件下都可以利用+24 V舟载蓄电池为状态监测系统提供电源。
电源模块选用160 W智能DC/DC ATX变换器,该变换器具有高效率、薄尺寸、标准ATX输出等特点,适用于车载电脑、工控机等多种用途。电源的输入范围可达6~30 V,能够适应大多数工程机械的电源规格。
该电源模块的特点是:高效率、薄尺寸;支持睡眠模式,支持遥控功能;带智能控制ITPS点火功能;标准ATX输出;6~30 V宽输入范围设计可选;具有很强的抗电磁干扰能力。
2.2.3 上位机硬件系统的集成
通过对工控机、液晶屏及触摸屏的选型调试,实现上位机硬件的设计。工控机在启动后运行Windows XPE系统,通过CAN总线与下位机进行数据交互;液晶屏启动实现显示功能,触摸屏通过USB总线与工控机实现交互。至此,上位机硬件能够稳定读取下位机采集处理后的数据,实现了状态监测与故障诊断系统的主机人机交互功能。
2.3 下位机硬件平台设计
2.3.1 下位机主处理器电路的选型
根据桥脚动力舟电气系统和液压系统的状态监测需求分析,选用了增强型基于ARM核心的32位微控制器STM32F103作为主操控系统的控制器。STM32F103微控制器采用了ARM32位的Cortex-M3 CPU内核,工作频率最高可达72MHz,可执行单周期乘法和硬件除法运算;其存储器的设置非常灵活,闪存程序存储器范围从256 kbit至512 kbit字节,并带有最多64 kbit字节SRAM。内置有4个片选的静态存储器控制器,支持多种外设存储器,如CF卡、PSRAM、NAND和NOR存储器等,提供并行LCD接口,并兼容8080/6800模式。主处理器的核心电路如下页图2所示。
2.3.2 信号调理电路设计
信号调理是指对从传感器或测试电路传来的信号利用各种滤波、放大或转换电路进行处理,以削弱或滤除信号中混杂的各种高频噪声信号,并对去噪后的信号进行变换和归一化处理,使信号能够被主控电路或CPU电路识别。在状态监测系统的硬件平台设计中,信号的调理和准确传输是否得当,直接影响到传感器信号的准确识别与变换、监控软件的正常运行和整个系统的可靠性。因此,在设计状态监测系统的硬件平台时,系统地分析了各种开关量信号、模拟量信号及指示灯电路的工作特性,并考虑到舟体发动机相关电源等的干扰,设计了专门的信号调理模块。各模块之间的通讯方式采用板载总线进行,保持了各个模块之间的机械连接和电气传输的稳定。在信号调理电路的设计中保留了扩展特性,设置了资源扩展功能,以提高信号调理模块的通用性和可升级功能。信号调理模块针对电控和液压系统硬件的信号特点,主要进行压力、温度、液压油位等传感器输出模拟信号的调理,各种压差传感器、状态切换旋钮和自复位按键所产生的开关信号的隔离变换等。

图2 主处理器电路
3 软件平台设计
软件平台的开发是系统设计的核心,负责协调系统的操作、管理、诊断和计算等功能。方案在原有硬件设计的基础上采用模块化设计思想,各部分设计功能明确,最后将硬、软件模块统一起来,提高了程序编写的可读性,保证系统的正常运行和可靠性设计。
软件系统的功能框图如图3所示,由5个模块构成,分别为状态监测模块、故障检测模块、历史数据模块、专家诊断模块和综合数据库模块。图4为助航与作业控制故障检测界面示意图。
4 结语
以某重型舟桥桥脚动力舟为对象,结合装备液压系统和电控系统组成以及原理特征,进行故障模式分析,通过广泛调研,收集专家意见,对该装备液压系统和电控系统常见故障征兆、原因及解决方法进行研究归纳,为装备故障诊断专家系统的建立奠定了技术基础。根据脚动力舟液压系统和电控系统的结构特点,进行了监测点位置布置设计以及参数选择,以单片机技术为基础,完成了信号采集硬件系统的设计,包括主处理器电路设计、数据处理电路设计、通讯电路设计以及电源电路设计等。

图3 软件功能模块结构图

图4 助航与作业控制故障检测界面
