二维海面上三维电大尺寸舰船目标电磁散射仿真
2018-11-28葛志闪鲜宁王津申李阳
葛志闪, 鲜宁, 王津申, 李阳
(1. 上海机电工程研究所, 上海 201109; 2. 北京航空航天大学自动化科学与电气工程学院, 北京 100083;3. 北京航空航天大学宇航学院, 北京 100083)
研究二维粗糙表面上的三维目标的复合模型电磁散射,对于海洋杂波环境中的海洋遥感和目标检测具有重要意义。然而,由于目标和粗糙表面之间的多重相互作用,使得此问题的研究非常复杂和困难[1]。近年来,大量文献致力于研究海面目标的复合电磁散射问题,包括数值方法、高频近似方法、混合解析数值方法和基于半空间格林函数的数值方法。数值方法具有精度高的优点,但计算量巨大,大部分尝试主要应用于计算一维粗糙海面上二维目标电磁散射问题[2-3]。高频近似方法通常用于快速分析电大电磁散射问题[4],与数值方法相比,高频近似方法具有计算精度较低的缺点。混合解析数值方法分别采用解析法和数值法[5],利用小扰动法(SPM)[6]、小斜率近似[7]或Kirchhoff近似(KA)[8]等分析方法计算出粗糙海面的电磁散射,并用数值方法计算目标的电磁散射。通过使用海面与目标之间的迭代过程或四路径模型[9]来求解耦合。然而,耦合迭代过程的计算时间较长,四路径模型的精度较低。由于基于半空间格林函数的数值方法[10]假设海面为无限大电介质平板,当海面上的风速较大时,模型不够准确,因此必须考虑粗糙海面。
矩量法(MoM)是内域积分形式的加权余量法的总称,其计算精度高,能够包含随机粗糙面与目标之间的多次复杂耦合作用,被广泛地用于随机粗糙面与目标的复合电磁散射求解。然而由于采用MoM计算电磁散射问题时,对计算机内存需求非常大,计算时间长,因此需要将MoM的快速算法用于求解随机粗糙面与目标的复合电磁散射。为了获得高可靠性的仿真结果,本文中采用MoM并融合多层快速多极子算法(MLFMA)[11]、并行计算等技术为一体的高性能混合全波数值方法。
本文中还依据目标的散射数据,获得了一维高分辨率距离像(HRRP)和二维聚束合成孔径雷达(SAR)成像。HRRP提供了目标散射点沿距离方向的分布信息,具有目标重要的结构特征,对目标识别与分类十分有价值。而二维聚束SAR成像含目标散射信息多且效果直观,在民用、军事方面有着广泛的应用前景[12]。精确的全波电磁场计算数据为成像提供了可靠的数据,成像也将电磁计算与实际应用紧密联系起来[13]。
1 海环境中目标电磁散射特性仿真
本文通过Solidworks建立舰船模型,如图1所示。模型基本参数为:长15.9 m,宽2 m,高1 m,船体最高3.94 m。采用软件Hypermesh对几何模型进行剖分,剖分平均边长为1/10波长。
为简化海面电磁散射问题,海面被视为理想电导体(PEC)。海面采用二维随机粗糙面模拟。为消除粗糙海面的有限截断产生的边缘效应,采用锥形波入射。用具有Pierson-Moskowitz(PM)海谱[14]的随机粗糙面模拟实际海面。三维PM谱具有如下形式:
WPM(kx,ky)=
(1)
舰船模型漂浮于30 m×30 m粗糙海面模型上。海面模型的剖分同样由Hypermesh实现,剖分平均边长为1/10波长。海面与舰船整体的网格剖分模型,需要对海面与舰船底部重叠部分,进行消隐处理,重新形成网格。海面与舰船的整体剖分模型如图2所示。
本文中的仿真运行平台为并行计算平台,10个结点,每个结点是2CPU×6核Inter至强处理器(2.66 GHz)。模型的未知量个数为317 607。单一频率、单一角度,一个结点,计算总时间为66.68 s。

图1 舰船CAD模型Fig.1 Ship CAD model
1.1 舰船目标的电磁散射特性
仿真参数设置如下:雷达观测类型为单站,入射波频率为0.75~1.25 GHz,VV极化,方位角度φ范围为-180°~ -160°,俯仰角度为30°,船尾方向为x轴正方向。从图3(a)所示舰船的方位特性可见,当方位角为-180°时,雷达散射截面积(RCS)最大,随着角度逐渐偏离,RCS减小,并呈现振荡起伏。从舰船几何结构可见,当方位角为-180°时,散射波的贡献主要为平面的二次反射、直棱边的反射,因此RCS数值较大。随着角度的偏离,散射成分逐渐变为棱边的绕射、尖顶的绕射等,因此RCS数值变小。从图3(b)所示舰船的频率特性可见,RCS振荡起伏剧烈,说明散射波为多个散射成分的叠加,如平面的二次反射、直棱边的反射、边缘绕射、尖顶绕射等。

图3 舰船的RCS方位特性和频率特性曲线Fig.3 Azimuthal characteristic and frequency characteristic curves of ship RCS
入射波频率为5 GHz,方位角度φ范围为0°~180°,其他仿真参数不变,计算舰船目标全极化散射特性。从图4所示全极化数据比较可见,VV和HH极化下RCS在量级上没有明显的差别,同极化结果均明显高于交叉极化结果。
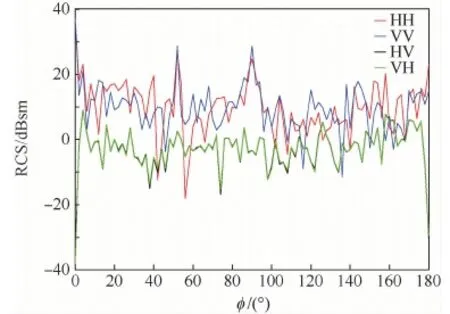
图4 舰船单站全极化RCS (入射波频率为5 GHz)Fig.4 Monostatic full polarization RCS of ship (incident wave frequency is 5 GHz)
1.2 不同粗糙度海面的电磁散射特性
仿真参数设置如下:雷达观测类型为单站,入射波频率为1 GHz,HH、VV 2种极化方式,方位角度φ范围为-90°~90°,俯仰角度为30°,风速为3 m/s(二级海情)、6 m/s(四级海情)。从图5可见,海面VV极化下RCS显著高于HH极化下RCS,由于HH极化的海杂波比VV极化的海杂波低,因此当目标位于海面上时,HH极化使得目标检测更容易。
1.3 海背景下目标的电磁散射特性
仿真参数设置同1.2节。从图6可见,RCS的不对称是由舰船的不对称侧面结构引起的。可以看出,尤其是垂直于船侧面的方向,例如-90°、-45°、0°、45°、90°,粗糙海面明显增强RCS。随着海面粗糙度变大,RCS随方位角度波动变得平滑。
2 海环境中目标雷达成像仿真
以场景中心为原点建立如图7所示直角坐标系。图中:H为雷达载机平台航迹高度;R0为合成孔径中心时刻雷达载机与场景中心的斜距;φ为SAR斜视角;θ为雷达波束中心视线在零多普勒面上的投影与铅垂方向的夹角;Oxyz为固定参考坐标系;Otxtytzt为舰船目标本体坐标系。
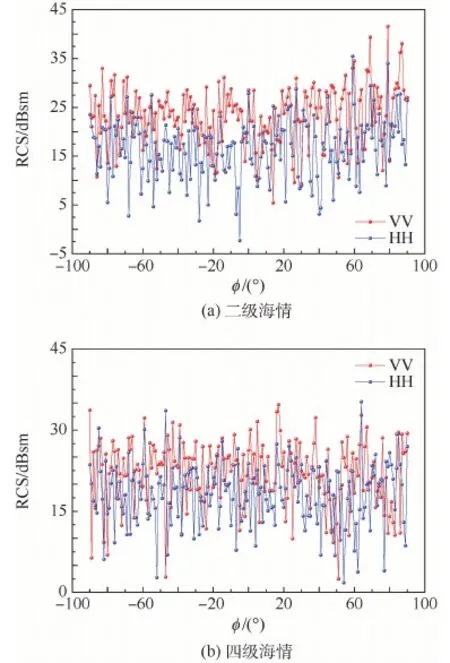
图5 单独海面在二级和四级海情下RCS (入射波频率为1 GHz)Fig.5 RCS of sea surface along for sea state of two and four (incident wave frequency is 1 GHz)

图6 海面(有/无舰船)在二级和四级海情下RCS (入射波频率为1 GHz)Fig.6 RCS of sea surface with/without ship for sea state of two and four (incident wave frequency is 1 GHz)
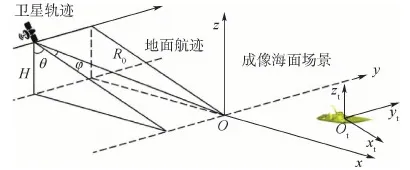
图7 雷达波照射目标/粗糙面Fig.7 Radar waves illuminating target/rough surface
雷达波采用线性调频信号,若取θi、φi为某个特定的角度,则可通过全波电磁仿真计算出目标的后向散射场,从而得到复数RCS[15]为
(2)

回波信号[16]为
(3)
式中:c为光速;τn为快时间,即雷达发射的线性调频信号的时刻;fk为每个脉冲的频率采样;A(fk,τn)为与目标RCS相关的幅值,相位与每个采样的频率相关,还和天线相位中心到目标的距离及天线相位中心到坐标原点距离的差ΔR(τn)相关。
对回波数据作离散傅里叶逆变换即得一维距离像。若取角度θi固定,方位角φi在一定角度范围内变化,则仿真回波数据是按转角间隔采集的,在每个角度采样点又是按频率进行采样的。在直角坐标系下,采样数据对应着一个扇形区域,对该扇形区域的数据进行二维插值,即可得矩形区域内均匀采样的回波数据。再对矩形区域的二维数据进行二维离散傅里叶逆变换,得到目标的二维聚束SAR成像[15]。
2.1 舰船目标的一维HRRP
从图8中2个观测角度下的一维距离像和图9一维距离像历程图可见,强散射点分布在-8~5 m之间,与舰船夹板上的凸起结构的位置分布范围一致,而这些结构中平面、棱边、尖顶是构成散射回波的主要散射源。
2.2 海面舰船的二维聚束SAR成像
将舰船目标置于30 m×30 m的海面上,在二级海情条件下进行电磁计算。将舰船模型与二维成像结果相比较,得到与二维成像结果相对应的舰船模型区域,如图10所示,图中1~4编号所圈部分为二维成像与舰船模型相互对应区域,用红色标记标注了二维成像与舰船模型的匹配结果,结果显示散射在二维成像图中表现最为明显,占据了较多的区域。
由于海面的散射会出现较多的杂波干扰,造成二维成像结果(见图10(b))除了目标本身其他区域还出现了许多亮斑,这是由于二级海情下动态海面的散射造成的。

图8 舰船目标的一维距离像Fig.8 1D range profile of ship target
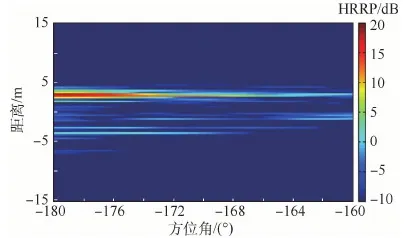
图9 舰船目标一维距离像历程图Fig.9 1D HRRP of ship target with different target aspects

图10 海面舰船二维成像对比Fig.10 Comparison of 2D imaging of ship on sea surface
3 结 论
1) 本文研究了三维电大尺寸舰船目标在随机粗糙表面上的电磁散射特性,这对于海洋环境特别有意义。由于经典的MoM难以解决此问题,因此借助于具有分布式存储器的计算机集群实现并行MLFMA。对单独舰船目标、不同粗糙度海面及复合场景的散射特性进行了研究,得出了一些重要的电磁散射特性,如海面VV极化下RCS显著高于HH极化下RCS,因此当目标位于海面上时,HH极化使得目标检测更容易。
2) 依据散射场数据,结合SAR成像算法,得到复杂舰船目标的一维HRRP及海面和舰船目标复合场景的二维聚束SAR成像。从舰船目标一维距离像上看出,强散射点分布与舰船甲板上的凸起结构的位置分布范围一致。二维聚束SAR成像结果清晰地反映出舰船目标的外形轮廓,而且由于海面的作用带来了一些杂波噪声。
致谢感谢北京理工大学电磁仿真中心为本文的仿真计算提供高性能并行计算平台。
