基于三维视景的车载ATP仿真系统研究
2018-11-23向美柱郑杰良张铭瑶王怀松
向美柱,郑杰良,张铭瑶,王怀松
(1. 西南交通大学信息科学与技术学院,四川成都 611756;2. 中铁二院工程集团有限责任公司通信信号设计研究院,四川成都 610031)
0 引言
列车运行控制是一个工程量大、复杂的系统过程,受制于资金、技术、时间等多种因素,现实中很难建立一个真实的试验平台进行相关研究和测试,然而计算机仿真技术的发展为其提供了行之有效的解决办法。视景仿真技术是计算机仿真技术的重要分支,是集多种高新技术于一体的综合运用[1]。我国在上世纪末就开始将视景技术应用于城市轨道交通仿真中。黄友能等以北京地铁 2 号线为背景研究了场景模型的生成、动态场景的控制和视点变换[2];苏虎等基于分布式结构计算,从场景模型的建立、自然现象的模拟等方面,设计与实现了三通道的视景系统[3];宋晓伟等探讨三维视景应用的可行性,分析并建立了三维模型与虚拟场景[4-5];谭喜堂等针对城市轨道交通特点,采用多种三维技术实现了具有虚拟驾驶台和三维视景的模拟驾驶培训系统[6-8];杨林等对自然对象和铁路设备对象进行三维建模,实现了列车运行的三维动态视景[9-10]。上述研究对列车运行三维仿真提供了很多思路,但大多用于交互式的驾驶培训或三维演示,而深入结合信号系统控制原理进行的研究较少。
ATP 系统是列车运行控制系统的重要子系统,承担着保证列车安全运行的重要功能,是实现列车超速防护、追踪间隔控制的核心[11]。在基于通信的列车控制系统(CBTC)下,ATP 系统主要由地面设备和车载设备组成,其中车载设备是 ATP 系统的关键,它根据地面移动授权生成速度防护曲线,实时监督列车运行速度。
本文以车载 ATP 系统为研究对象,并基于 MSTS 平台的底层引擎和模型库,以郑州地铁 1 号线为背景,建立三维视景,为实现车载 ATP 的功能提供一个真实客观的现场列车运行环境。
1 视景系统的建立
随着计算机技术的发展,视景仿真的实现方法和平台也日趋多元化。无论是传统的 Creator、Vega、CAD、3DMax,还是最新虚拟现实仿真技术代表 Unity3D,都有不可忽视的局限性[12-13],即学习成本高、建模难度大、周期长、模型复用程度低等。而本文选取的MSTS虽然是一款早期的游戏引擎,但具有配套的线路编辑器、地形编辑器、驾驶室编辑器和任务编辑器,有强大的模型库和图像处理能力,可扩展性强,能批量进行三维场景的创建,这极大地提高了建模的质量和效率。
郑州地铁 1 号线一期全长 26.2 km,共设车站 20 座。依据 CAD 设计图纸,在 MSTS 地形编辑器中,结合 Google Earth 的经纬度地标信息,指定地形区域,导入数字高程模型(DEM)实体地面模型包,确定线路走向与位置,实现对所在线路的地形仿真复原,如图 1 所示。
线路地形及走向复原后,即可在编辑器中进行场景模型的布置。视景系统的模型包括车站、列车、轨道、信号设备(道岔、信号机、转辙机等)、隧道等。MSTS目前的模型库中已支持大多数城市轨道交通场景的需要,对于少量不存在的模型,仍需使用 3DMax 进行建模。视景系统最终呈现效果如图 2 所示。
2 车载 ATP 仿真系统总体设计
根据功能需求,对仿真系统进行设计,如图 3 所示,系统由视景子系统和车载 ATP 子系统 2 部分组成。由场景建模、场景驱动和场景输出共同构成的视景系统模拟现场环境。通过视景系统内部提供的应用程序编程接口,创建了模拟区域控制器(ZC)的三维数据中转服务器,用于接收现场线路数据、车辆运行数据、车辆状态数据等,同时接收来自车载 ATP 的命令,反馈给三维列车。
车载 ATP 主要由 6 个模块组成。
(1)接口服务器:连接视景系统,获取视景系统中的各种静态数据和动态数据。
(2)基础数据设置:超速防护的计算初始条件,获取列车特性、时间特性、阻力系数、线路限速等数据。
(3)超速防护:根据目标点及目标距离,实时生成超速防护曲线。
(4)测速定位:依据视景系统的动态寻径和视点控制原理,确定当前列车所在区间,获取列车的位置和速度。
(5)速度监督:实时监督列车运行速度,当速度超过 ATP 防护曲线时,能及时实施最大常用制动或紧急制动。
(6)运行动力学计算:以视景系统中的实际线路为例,根据运动学方程,计算列车的牵引力、制动力和阻力,为超速防护提供依据。
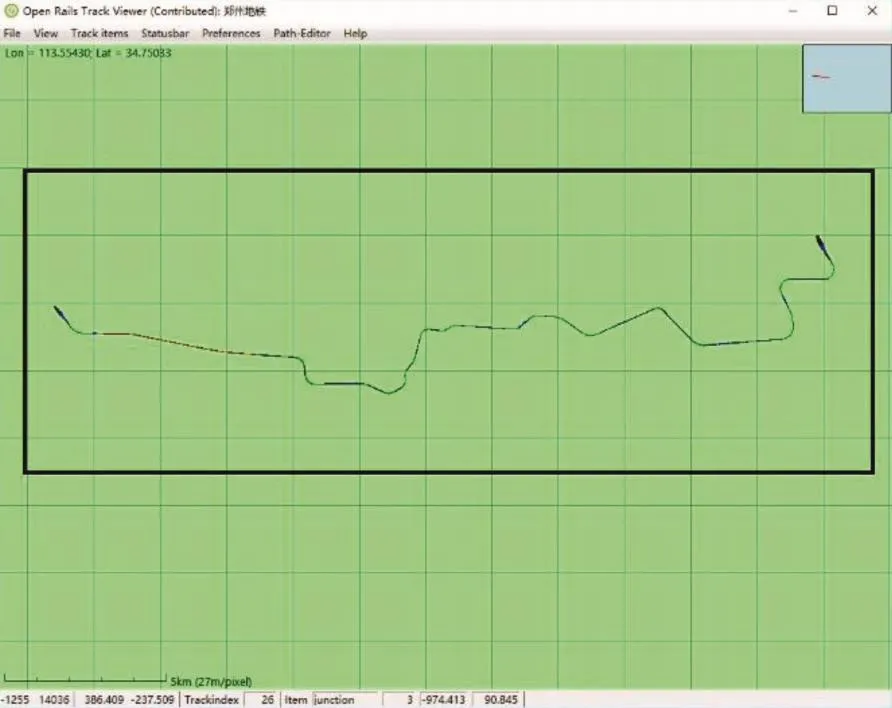
图1 郑州地铁 1 号线线路复原
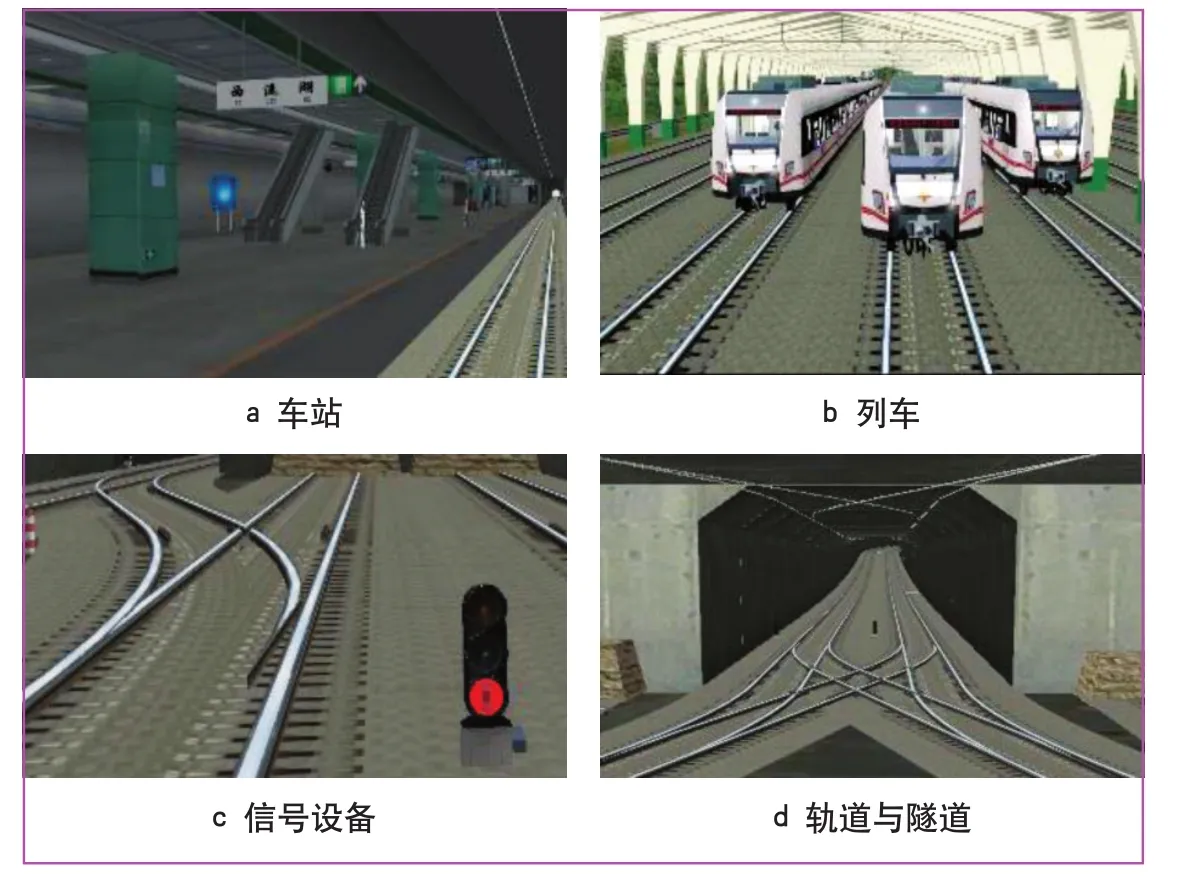
图2 视景系统
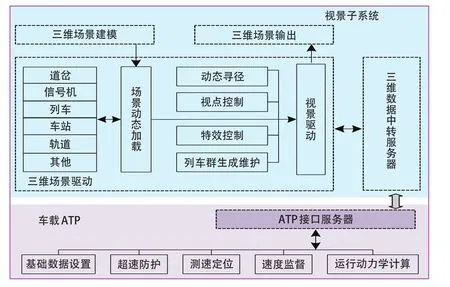
图3 基于三维视景的车载 ATP 系统结构
3 车载 ATP 仿真系统设计与实现
基于面向对象仿真方法,依据 OR 开源程序,使用C#语言进行程序设计与实现。其中涉及的关键技术有多进程、Socket 通信、ADO.NET、XNA 技术等。
3.1 视景系统与车载 ATP 通信
通信模块基于以太网传输控制协议(TCP)通信,根据典型的客户/服务器(C/S)模式,使用流式 Socket 套接字来实现。系统通信的传输业务主要包括 3 种:车辆控制信息、车辆状态信息、线路信息,如图 4 所示。
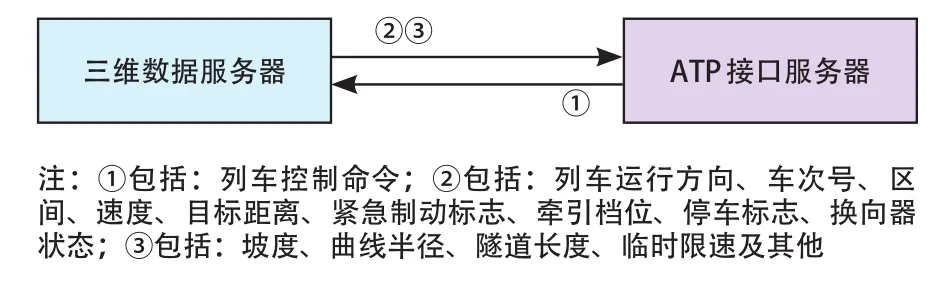
图4 系统通信数据流
通过对视景系统创建的外部接口,在列车运行过程中不断将列车速度、位置、目标距离、车次号等车辆运行数据,以及线路坡度、曲线、隧道等线路数据发送给三维数据服务器,继而转发给 ATP 接口服务器。车载 ATP 接收并处理来自视景系统的数据,通过计算确定移动授权(MA)并发送给视景系统,以实现三维列车在 ATP 防护下的运行。
3.2 超速防护
CBTC 安全制动模型定义了列车在最不利情况下从触发紧急制动到停车的整个过程,是实现超速防护功能的重要基础。它由紧急制动曲线、紧急制动触发曲线、ATP 曲线组成[14]。根据保障性紧急制动率(GEBR)可以计算得到紧急制动曲线;根据紧急制动曲线可计算出紧急制动触发曲线;根据紧急制动触发曲线可得到 ATP曲线。对 ATP 系统的仿真研究,重点在于对安全制动曲线的研究[15-16]。
3.2.1 紧急制动曲线
根据目标-距离模式,使用反算法建立防护曲线的计算模型[17],如图 5 所示。
设列车目标速度为vtarget,km / h;目标距离为starget,m;列车制动初速度为vs;末速度为ve。使用微元法将starget划分成若干个固定长度 Δs的区段;在一个微元里,可认为列车的加速度a(m/s2)和列车所受合力f(N/kN)是恒定不变的。

图5 反算法原理
算法具体步骤如下。
(1)根据移动授权终点,确定目标距离starget。
(2)确定目标点位置和目标速度vtarget,若目标点为车站或前行列车,则vtarget为 0;若目标点在限速区段,则vtarget为限速值。
(3)计算最限制速度曲线(MRSP)上的最限制速度,以确定本次计算的顶棚速度vlimit。
(4)将starget划分成n个固定长度l的 Δs区段,n=starget/l,其中步长l可视精度灵活选取。
(5)设i为计数器, List < double > 为存储制动初速度的泛型集合,令i= 0,根据式(1),计算第n个区段的制动初速度 。

(6)令i=i+ 1,根据式(1)计算vs。
(7)比较vs与vlimit,若vs<vlimit,则 List[n-i]=vs,否则 List[n-i]=vlimit。
(8)比较n与i,若i<n,记录该区段的制动初速度vs,并设置下一区段的制动末速度为ve=vs,转步骤(6);若i=n,则结束计算。
将全部所求的速度点(iΔs,vei)用平滑曲线连接,即得到紧急制动曲线。
3.2.2 紧急制动触发曲线和 ATP 曲线
设ad为最大惰行加速度,aq为最大牵引加速度,tATP为 ATP 设备制动反应时间,tz为制动建立时间,tq为牵引切除时间,紧急制动曲线上的点为(vi,si)。根据式(2)和(3)可计算对应的紧急制动触发曲线上的点


同样将所求紧急制动触发曲线的全部点由平滑曲线连接,即可得到紧急制动触发曲线。根据文献[14]可知,紧急制动触发曲线与 ATP 曲线存在一定的超速允许量,用紧急制动触发曲线上的速度减去规定的超速允许量,即可得到 ATP 允许速度。
3.2.3 最限制速度曲线
最限制速度是确定顶棚速度的关键,综合考虑了模式限速、临时限速、静态限速、列车构造速度等多种因素并取其中的最小值[18]。此外,在一段线路中的最限制速度曲线计算时,从较低限速区到较高限速区,还要考虑列车车长因素。为简化计算,仿真系统中最限制速度由用户根据实际线路情况设置。
3.3 测速定位
视景系统中,通过 MSTS 提供的应用程序接口,结合 OR,由程序实时获取列车当前速度。列车位置由空间坐标X、Y唯一确定(由于仿真线路在同一平面,可忽略Z坐标),从线路转换轨开始,在每站之间按一定间距和顺序设置虚拟应答器,记录坐标并保存到数据库中。虚拟应答器用于校验列车的当前位置和速度。表 1 为数据库中虚拟应答器位置数据的存放格式,其中station 表示车站序号,order 表示当前车站对应的后面区间某个虚拟应答器编号。例如 order = 01,表示第 1 个站后面的第 1 个虚拟应答器,其坐标为(-970.601,90.768 4)。
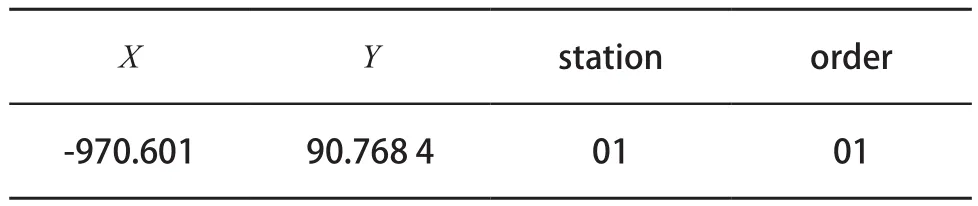
表1 虚拟应答器位置数据存放格式
该模块为超速防护的实现提供了必要的速度及位置数据。
3.4 列车动力学计算
车辆的牵引和制动大小由其各自的特性曲线决定,特性曲线以一组离散点的方式由厂家提供。本文只考虑满载情况,图 6 为仿真所需制动特性曲线。
设点 A(v1,B1)、B(v2,B2)为制动特性曲线上任意 2 点,使用线性插值法,根据式(4),可求出 A、B 间任意vx时的制动力Bx。
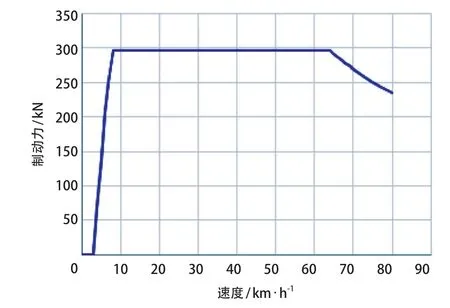
图6 制动特性曲线

牵引力与上述类似。列车在运行过程中,产生的阻力包括基本阻力和附加阻力,附加阻力又主要包括坡道附加阻力、曲线附加阻力和隧道附加阻力。设列车制动力为B,kN;列车单位基本阻力为w0,N/kN;单位坡道附加阻力为wi,N/kN;单位曲线附加阻力为wr,N/kN;单位隧道附加阻力为ws,N/kN;定员载荷质量为M,t;重力加速度为g,回转质量系数为r,则列车在制动运行工况下所受单位合力、加速度为:

根据列车牵引计算规程,列车基本阻力由经验公式给出:

设i为坡度,θ为轨道与水平线夹角,R为线路曲线半径,Ls为隧道长度,则单位坡道附加阻力、单位曲线附加阻力、单位隧道附加阻力分别为:
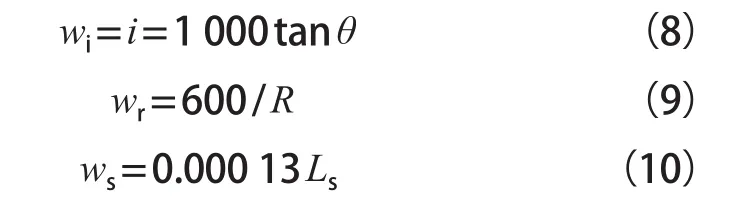
视景系统中线路数据格式如表 2 所示,其中θ为正表示上坡,为负表示下坡,能唯一确定轨道坡度,计算坡道阻力;轨道若为弯轨表示该位置线路为曲线,半径R能唯一确定曲线阻力;视景系统中的空间坐标X、Y能唯一确定车辆运行时分的位置和目标距离,可结合测速定位功能,确定隧道长度,计算隧道阻力和基本阻力。

表2 视景系统线路数据格式
牵引计算程序实现过程如图 7 所示。

图7 牵引计算程序
3.5 速度监督
根据“撞硬墙”方式的移动闭塞原理,后行列车以前行列车尾部(附加一定安全距离)为追踪点运行。在视景系统中创建 TrainCar类,定义列车速度属性值SpeedMps,依据动态寻径原理,实时更新速度值。程序实现过程如图 8 所示,车载ATP 时刻监督列车的运行速度 SpeedMps,当实际运行速度超过了 ATP 允许速度,列车发出报警并实施常用制动;若列车已实施最大常用制动且在规定时间内速度仍然超过 ATP 防护速度,则触发紧急制动,制动过程严格按照紧急制动曲线或在其下方进行,以保证列车在目标点前停车,确保行车安全。

图8 速度监督程序
4 测试与结果
根据式(1)~(10),基于超速防护的反算迭代计算模型,采用分布式模块技术完成了车载 ATP 的设计,仿真界面如图 9 所示。
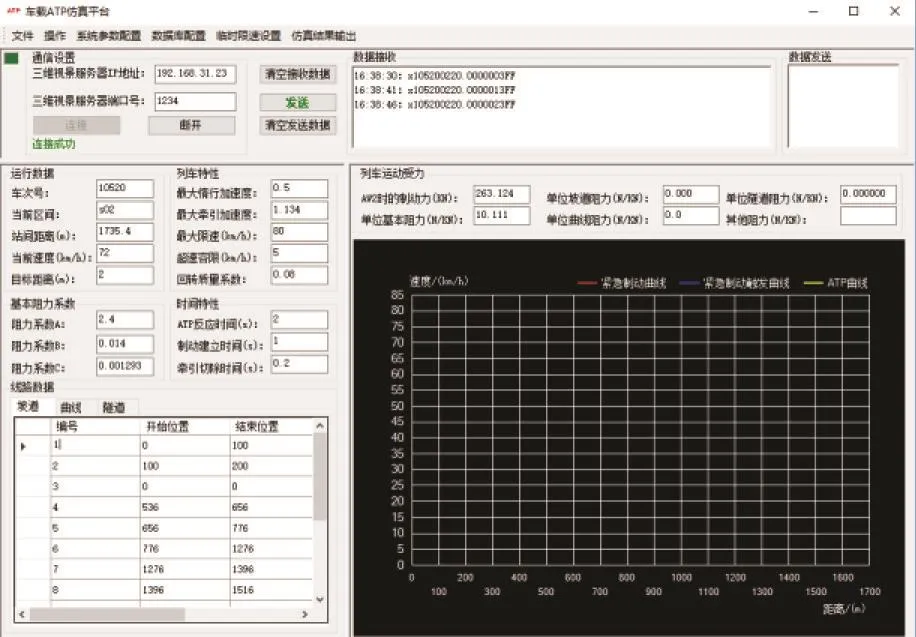
图9 车载 ATP 仿真平台
郑州地铁车辆采用 6 辆编组的B 型车,定员载荷时列车质量M为285.34 t[19]。为简化计算,依据文献[20-21],系统所采用的其他仿真参数设置为:ATP 设备反应时间 2 s,紧急制动建立时间 1.5 s,牵引切除时间 0.4 s,最大惰行加速度 0.5 m/s2,最大牵引加速度 1.134 m/s2,列车最大限制速度80 km/h,回转质量系数 0.08,速度测量误差 5%。
结合实验室郑州地铁 1 号线ATS 进行联合测试,以“西三环站—秦岭路站”为例,后行 10520车次列车以前行10120 车次列车的尾部为追踪点(附加一定安全裕量),测试结果如图 10所示。
后行列车速度始终能保证在防护曲线下运行,一旦超速能及时进行常用制动或紧急制动。由于在搭建三维环境时,为减少建模工作量,并未完全按照实际数据对线路进行还原,所以系统所得到的紧急制动距离与实际运行参数还存在一定误差,但仿真测试证明系统整体运行良好,达到了预期仿真目的。
5 结语
车载 ATP 是城市轨道交通中确保列车行车安全的重要组成部分,本文针对视景仿真技术主要应用于驾驶培训和三维演示的情况,提出了基于三维视景的一种车载ATP 仿真设计方法。根据实际线路创建的视景系统,提供了逼真的列车运行环境,以此进行车载 ATP 的仿真研究,实现了列车的测速定位、超速防护、速度监督等功能。
本文提出视景技术与列控车载系统结合的仿真方法极具扩展性,系统可根据不同实际需求,采集线路数据,对地铁线路进行视景还原,然后可进一步结合列控车载原理进行仿真研究。这对于近年来快速发展的城市轨道交通,无论是新线建设还是旧线改造,都为前期车载 ATP 的仿真研究和测试提供了一个新的解决思路,对其他列控子系统的研制、测试,以及设备参数优化、线路设计等也同样具有实际意义。
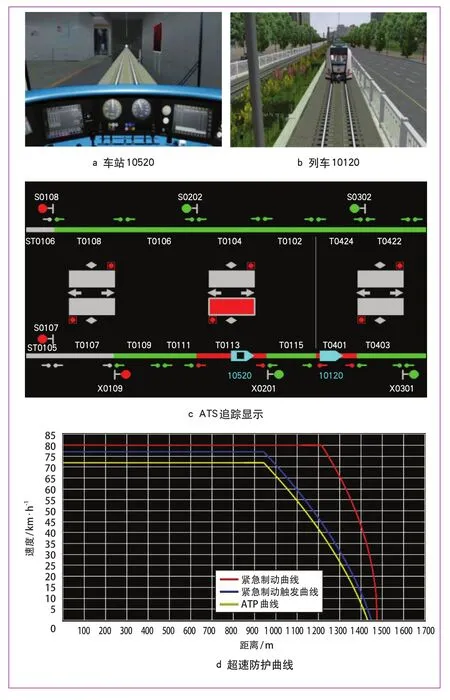
图10 测试结果