单开关控制风光互补发电系统的控制策略研究
2018-11-23,,,,
,, ,,
(嘉兴恒创电力设计研究院有限公司,浙江 嘉兴 314000)
近年来,随着工业的发展以及人口的增多,能源消耗日益增多,尤其是化石能源,如今,它们已经面临短缺的局面。另一方面,人类利用化石能源一般采用燃烧的方式,因而造成了一系列环境问题,比如煤炭燃烧会排放大量二氧化碳和有毒气体,造成了严重的大气污染。在这种背景下,各国的眼光开始转向清洁、可再生的新能源,其中,风能和太阳能凭借着成本低、无污染、资源丰富等特点成为应用最为广泛的能源,现在对它们的利用也已经很有规模[1]。太阳能作为一种清洁能源,由于具有普遍性、无害性和长久性等特点,与石油、煤炭和天然气等传统能源相比,有着无法比拟的优势[2]。风能和太阳能在时间和气候上的互补性,组成风光互补发电系统,并合理的配置两者容量的大小,可以提高系统输出的稳定性,减少储能容量的投入,对节能减排具有积极的作用[3]。风光互补可以结合太阳能发电以及风力发电的优点,弥补各自的不足,是一种最优的能源结合的方式。
传统风光互补发电系统的结构一般都是风力发电机和太阳能电池板分别通过一个DC/DC变换器实行最大功率点追踪(maximum power point tracking,MPPT)控制[4-5],或者将风力发电机得到的交流电整流后和太阳能电池板输出并联作为DC/DC变换器的输入,对整体进行MPPT控制[6]。在控制策略上,一般都是独立实现风电和光电的MPPT控制,文献[7]采用功率法对风机实现MPPT控制,对于光伏发电,则结合传统MPPT方法,提出了以定电压法启动结合功率前馈的变步长电导增量法。文献[8]提出一种基于二进制蚁群模糊神经网络的光伏系统最大功率点跟踪控制策略,利用模糊神经网络代替传统的 BP 神经网络对最大功率点进行预测。文献[9]提出了一种基于 BP 神经网络的最大功率点跟踪控制模型,通过对光伏阵列进行区域划分,并根据不同区域的光照强度与温度的变化,实现最大功率点跟踪与控制。文献[10]采用了双输入的DC/DC变换器,分析光伏与风能MPPT控制各自特点后,提出一种能同时适用于两者的自调整MPPT策略,提高了系统的稳定性与效率。
本文则是采用将整流后的风电和光电直接串联的拓扑结构,只用单个开关实现MPPT控制,节省了系统成本,在控制算法上,则采用定时扫描法和扰动观察法相结合的方式,保证了找到的最大功率点的准确性,从而避免陷入局部最大功率点。
1 风光互补发电系统结构
小型风光互补发电系统主要由电能产生部分、电能变换部分、电能存储部分、电能消耗部分以及控制器这五个部分组成。
本系统总的原理图如图1所示,电能产生部分由风力发电和太阳能发电构成,太阳能电池板输出与风力发电机整流输出串联后共同给蓄电池充电;电能变换部分则是蓄电池前后的变换电路,前级变换器是为了改变风力发电机和太阳能电池板串联后的整体输出电压,从而使系统工作在最佳工作点上以输出最大功率。系统中负责电能存储的是蓄电池,它可以消除由于天气等原因引起的能量供应和能量需求的不平衡[11];电能消耗部分就是各种用电负载及卸荷电阻;控制器是整个系统的核心,它可以实现对蓄电池的充放电控制、负载控制以及对系统的保护控制。

图1 风光互补发电系统原理图
2 风光互补发电系统模型
2.1 风力发电系统模型
风吹过风轮带动风轮旋转,将风能转化为机械能,风轮带动发电机发电,将机械能转化为电能,若是直接将风力机和发电机连接在一起则构成最简单的风力发电机,即直驱式风力发电机。
由空气动力学知识可知,风机实际吸收的风能为
(1)
式中λ——风力机的叶尖速比,λ=ωR/v;
ω——风力机的角速度;
R——风轮半径;
β——风力机的桨距角;
Cp——风能利用系数,经常表示为叶尖速比与桨距角的函数,Cp≤0.593,不同桨距角下它随λ的变化如图2所示
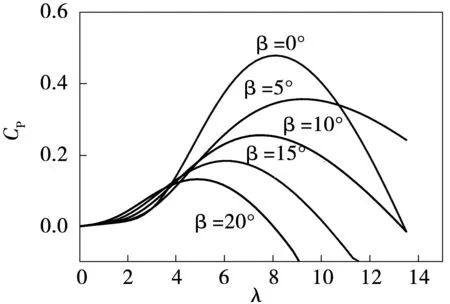
图2 不同桨距角下Cp随λ的变化曲线
根据式(1)知,对于固定的系统,风机的风轮面积S,风机半径R,空气密度ρ是不变的,所以风力机的输出机械功率仅与桨距角β,叶尖速比λ和风速v有关。若是保持桨距角不变,则在风速一定的情况下,风机输出的机械功率随风机转速n的变化关系与CP随λ的变化关系一致,不同风速下,风力机的输出机械功率随风机转速n的变化曲线如图3所示。

图3 风机的输出机械功率随转速的关系
2.2 太阳能发电系统模型
太阳能电池板是本系统的另一电能产生部分,它的作用是将光能转化为电能。根据太阳能电池的等效物理模型,可以得到太阳能电池的实际输出电流IL和输出电压VO的关系式
(2)
式中ISC——太阳能电池在光照下所产生的电流,大小与外界温度及光照强度有关;
Rs——由于太阳能电池材料本身的电阻率、电极本身以及与硅表面的接触等引入的附加串联电阻;
Rsh——旁漏电阻;
IS——PN结的反向饱和电流;
Vt——温度的电压当量,Vt=KT/q;
q——单位电荷,等于1.6×10-19C;
K——玻尔兹曼常数,等于0.86×10-4eV/K;
T——太阳能电池板的表面温度,用热力学温度表示。通常情况下,Rs很小,而Rsh很大,所以将(VO+RsIL)/Rsh的效果忽略不计。
结合式(2)可以得到太阳能电池在不同温度和不同光强下的特性曲线,如图4和图5所示。
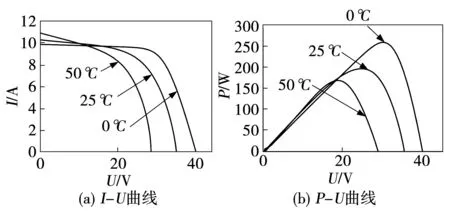
图4 不同温度下的特性曲线
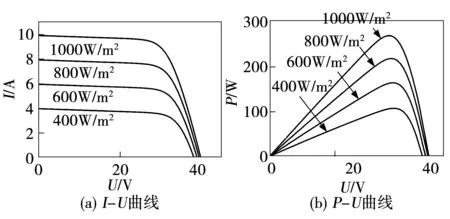
图5 不同光强下的特性曲线
3 最大功率追踪策略
MPPT方法诸多,叶尖速比控制法、功率反馈法和爬山搜索法最为常用。
叶尖速比控制法要根据实测的风速,不断改变转速使得每一风速下风机都输出最佳叶尖速比。功率反馈法只需要测量转速,将实时的风机转速对应到预先模拟的最佳功率曲线中,将相对应的功率与实际功率作对比以控制风机的转速来找到最大功率点。爬山搜索法和扰动观察法类似,不需要测量转速和风速,只需给转速一个扰动,根据功率的变化方向改变转速的扰动方向从而找到最大功率点。
从图4和图5可知,太阳能电池的输出功率具有很强的非线性,受温度和光照强度的影响大。但是在一定的外界环境下,太阳能电池在某一特定工作点将会输出最大功率。太阳能发电中实现MPPT的方法有很多,比如恒定电压法、扰动观测法、电导增量法、模糊控制算法等[12]。扰动观察法就是不断改变太阳能电池板的输出电压的大小,根据每一次扰动后功率变化的方向来决定下一次输出电压变化的方向。若扰动后功率减小,则让输出电压向上次电压变化的反方向变化,如果扰动后功率增大或者不变,则继续按原方向改变输出电压,直至找到最大功率点。该方法算法简单,且易实现,既避免了恒压控制法对环境温度的依赖又克服了导纳增量法计算复杂、对传感器要求高的缺点。本文的控制策略将以该方法为基础,再根据实际情况进行优化。
本次实际系统中风力发电的整流输出与太阳能输出采用了串联的方式,根据它们各自的P-U曲线可知,总输出功率随总输出电压的特性曲线可能会出现多峰值的情况,它的部分特性曲线如图6所示。
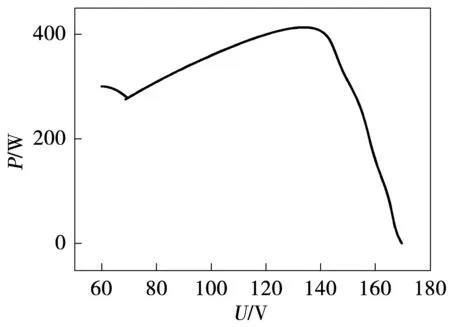
图6 风光互补系统的P-U曲线
前文所述的几种MPPT方法都是应用在单峰值曲线中,风光互补的P-U曲线可能是多峰值的,所以上述方法不再适用。该系统的MPPT控制算法将分为两个阶段,由于可能是多峰值,所以,为了避免搜索到局部最大值而不是全局最大值,可以先用扫描法直接搜索到全局最大值,然后在全局最大值附近进行扰动观察。
考虑到对蓄电池的保护,可将整个充电模式分为恒流充电模式和恒压充电模式两部分。恒流充电中要设定一个电流上限Imax,并使用MPPT对系统进行控制,使之以最大功率对蓄电池进行充电,充分利用太阳能及风能。若是充电电流大于Imax,则放弃MPPT控制,增大MPPT搜索得到的输出电压,使充电电流维持在Imax附近。当蓄电池容量接近饱和,就要进入到恒压充电模式,在该模式中要设定一个电压上限Umax,MPPT搜索过程依然执行,但不把MPPT搜索的结果去控制系统,而是增大MPPT搜索得到的输出电压以减小输出功率,使蓄电池电压维持在Umax附近。
4 仿真分析
按照图1的框图搭建仿真模型,如图7所示。测得实际300 W/300 rpm的永磁同步电机的定子电阻、定子电感、极对数分别是0.29 Ω、1.6e-4 mH、32。
仿真中,设置的太阳能电池板及风力机的特性参数分别如表1和表2所示。
表1太阳能电池板仿真参数设置

参数值短路电流/A10开路电压/V40最佳工作点电流/A8最佳工作点电压/V30

图7 风光互补发电的MPPT仿真模型
表2风力机仿真参数设置

参数值额定输出机械功率/W300额定风速/m·s-112额定风速下的最大功率/W300额定转速/rpm300桨距角/°0
实际仿真中,MPPT算法比较的是蓄电池的充电功率,由于充电功率的变化情况和风光互补总输出功率的变化情况一致,而且无法知道具体的充电功率的最大值,所以可以直接观察风光互补总输出功率的变化情况。进行MPPT控制时,先用扫描法找到全局最大功率点,再在最大功率点处进行扰动观察。当风速为12 m/s,光照为1 000 W/m2时,得到的充电功率的波形如图8所示。
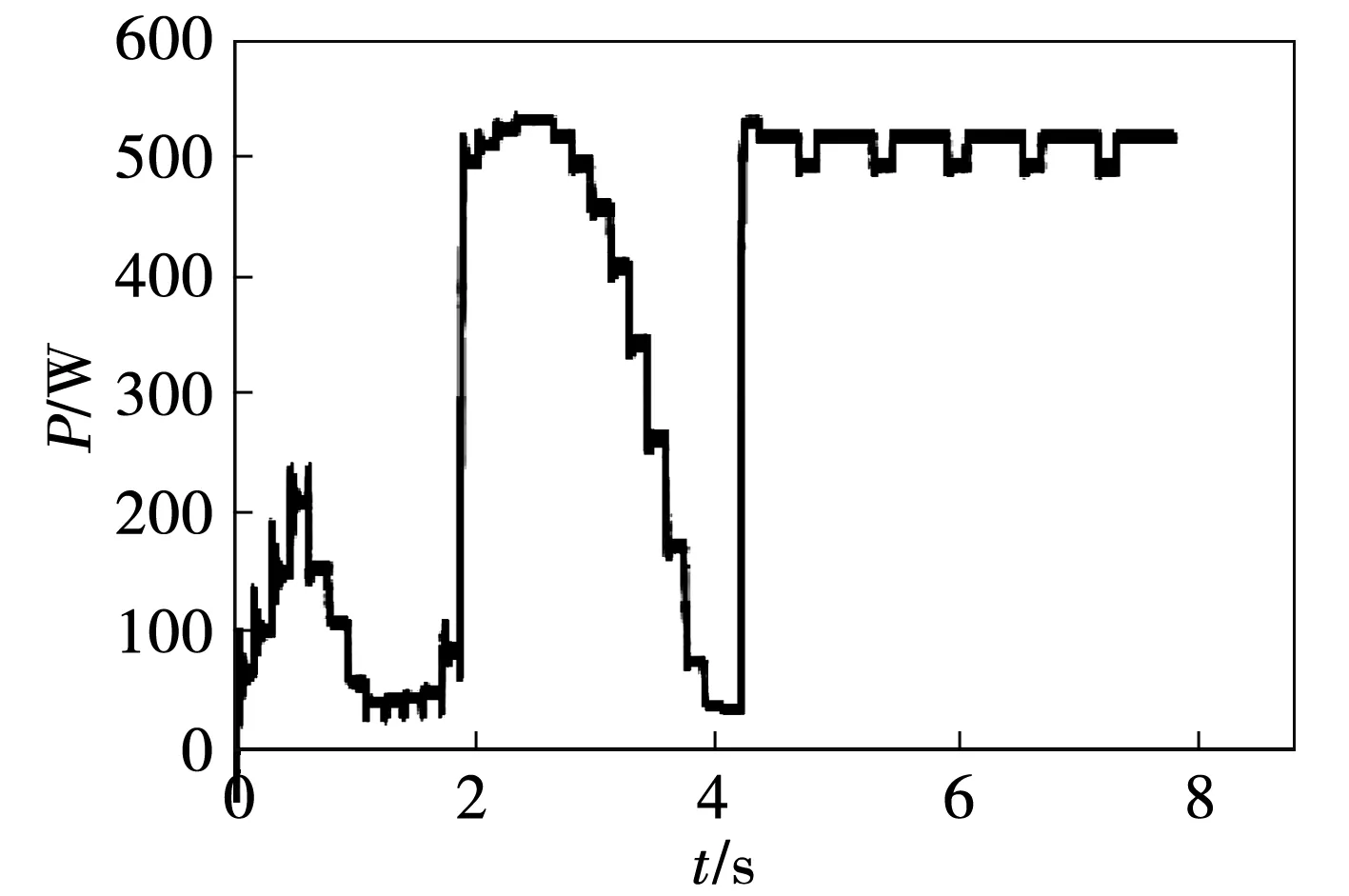
图8 MPPT控制下的充电功率波形
仿真时间在0~4 s的区间段是系统运行在扫描模式下的功率曲线,由于在扫描模式中占空比是不断减小的,所以风光互补输出总电压是不断增大的,说明该小型风光互补系统的输出功率随输出总电压的变化曲线中有两个峰值。从图8也可以看出,MPPT控制下系统最后能以扫描模式下找到的最大功率输出。
5 实验结果
借助太阳能发电的实验平台可验证MPPT控制算法的有效性及两种充电模式对蓄电池是否能起到保护作用。
MPPT控制方法采用的是扫描法+扰动观察法,实验平台如图9所示,实验参数如表3所示。
表3实验参数
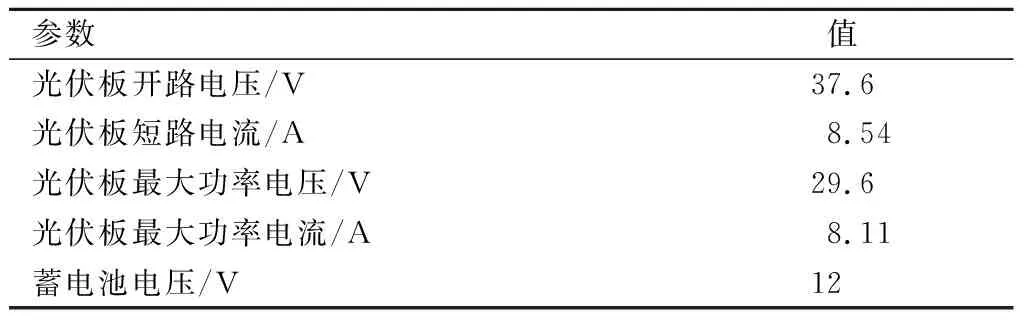
参数值光伏板开路电压/V37.6光伏板短路电流/A8.54光伏板最大功率电压/V29.6光伏板最大功率电流/A8.11蓄电池电压/V12

图9 实验平台
在CodeWarrior中进行软件设计,用FreeMaster查看整个扫描过程中充电功率随占空比变化的关系如图10所示。
从图10可以看出,充电功率虽然有小的波动,但是整体趋势是随着占空比的增大先增大后减小的。扫描模式找到的最大功率点对应的占空比DUTY_Power_MAX=13954。从P_D曲线也可以看出,最大功率点对应的占空比确实在14 000附近。

图10 扫描模式中充电功率随占空比的变化曲线
再利用FreeMater记录在扫描法+扰动观察法下占空比和功率随时间的变化。记录波形如图11所示。

图11 扫描法+扰动观察法下占空比和功率变化曲线
图11可以看出,在7.6~17.8 s之间系统处于扫描模式,17.8 s之后系统处于最大功率模式。经测试其最终输出的占空比是14 263,和扫描法找到的最大功率点对应的占空比13 954相比有一定的差距,考虑到测试时外界环境的变化以及占空比(0~32 767表示0~100%)范围比较大,可认为该差值在可接受范围之内。
结合对蓄电池的保护,再次运用MPPT算法。当系统工作在恒流模式、恒压模式以及从恒流模式转为恒压模式时,得到测试结果如图12所示,图中从上到下的几条曲线分别表示蓄电池电压、充电电流、MPPT搜索得到的占空比DUTY_PV和系统实际输出的占空比DUTY_PV_OUT(U_BAT_Disp、I_PV_Disp均为实际值的10倍)。
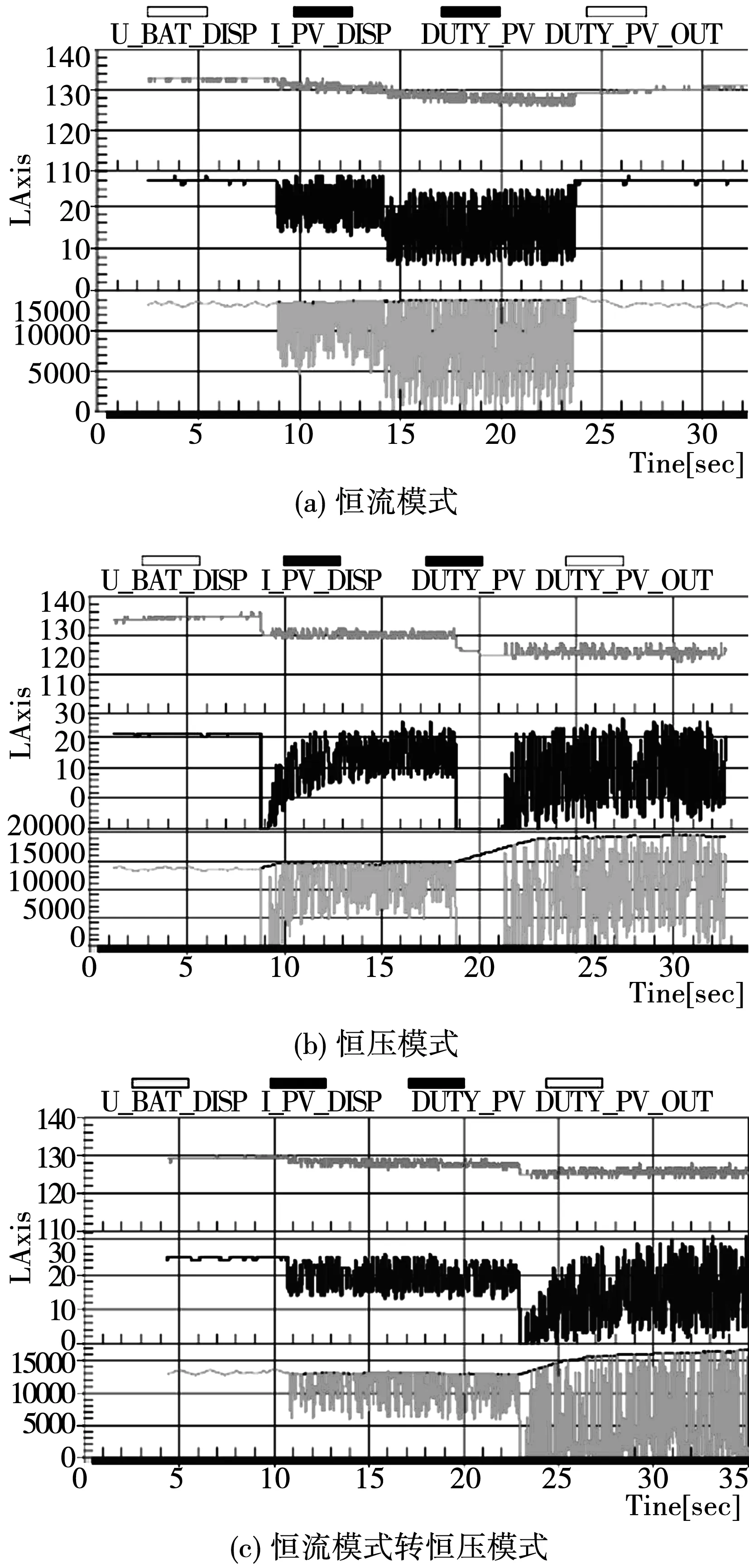
图12 各模式下的测试曲线
恒流模式中电流限Imax依次为8 A、2 A、1.5 A、3 A,初始电流限下系统能工作在最大功率点。从图12(a)可以看出初始时电流限下,MPPT追踪到的最大功率点对应的充电电流为2.5 A,让电流限减小,充电电流也会减小到相应值附近,充电功率也减小,当电流限大于2.5 A时,系统重新进入MPPT追踪,充电电流回到最大功率点对应的电流,即2.5 A。
当系统工作在恒压充电模式时,应将电流限设为较大值,以免电流限发挥作用。该模式中的电压限依次为15 V、13 V、12.5 V。MPPT搜索得到的占空比DUTY_PV与DSP实际输出的用来控制开关管的占空比DUTY_PV_OUT满足关系式:DUTY_PV_OUT = DUTY_PV - DUTY_DEC_U- DUTY_DEC_I。其中,DUTY_DEC_U和DUTY_PDEC_I分别表示蓄电池电压超限和充电电流超限时占空比应改变的量。所以在本次测试中,若蓄电池电压达到了电压限,则系统应该进行调节,调节过程中DUTY_PV_OUT应该小于DUTY_PV。从图12(b)可以看出,当蓄电池电压达到电压限13V时,每一时刻DUTY_PV_OUT小于或等于DUTY_PV,且蓄电池电压在13 V波动,短时间内不会继续升高,将电压限设为12.5 V时亦是如此,说明了电压限的有效性。
恒流充电模式转为恒压充电模式中电压电流的初始限值为15 V,8 A,先将电流限设为2 A,再将电压限设为12.5 V。从图12(c)中可以看出,最大功率点下的充电电流是2.5 A,将电流限设为2 A时,则充电电流减小,充电功率也相应减小,再将电压限设为12.5 V,则蓄电池电压减小,充电电流和充电功率也减小,说明电流限和电压限均起了作用。
6 结论
本文采用了风力发电机整流输出与太阳能电池板串联的结构,在分析传统MPPT控制基础上,提出了扫描法结合扰动观察法的控制策略,并用仿真证实了其有效性,最后,结合蓄电池的充放电特点,用实验验证了恒压与恒流综合控制的充电策略的有效性。
