对控制网络自身故障检测与诊断的研究
2018-11-20张荣昌
张荣昌
(广东电网有限责任公司江门开平供电局,广东江门529300)
1 控制网络故障诊断原理概述
控制网络故障诊断在本质上就是模式识别的问题。控制网络故障诊断主要是根据发生故障时的系统现象和网络状态参数,通过分析诊断找出故障发生的原因以及位置。
通过阅读国内外相关文献,总结故障诊断的方法论,基本是遵循以下三个步骤:第一步是故障检测,采集控制网络系统状态参数的故障信号;第二步是故障分离,对故障状态信号数据进行预处理,提取特征;第三步是故障识别,根据网络的状态参数快速确定网络故障的类别。控制网络故障诊断流程如图1所示。

图1 控制网络故障诊断流程图
2 故障数据采集与特征提取
由于控制网络结构的复杂化和综合化,故障联锁产生的关联现象通常会使采集的数据中包含了大量的冗余,而这些冗余的特征会增加数据的维度,增加计算的复杂度,无法达到快速准确诊断故障的要求,甚至有可能出现“维数灾难”。
因此文献[1]提出了中心距离比值加权主元成分分析(CDRWPCA)算法。该方法对主流的降维算法PCA进行了改进,克服了PCA作为无监督特征提取方法,在将特征投影到低维空间时,可能会丢失对分类有用的鉴别信息的弊端(图2)。
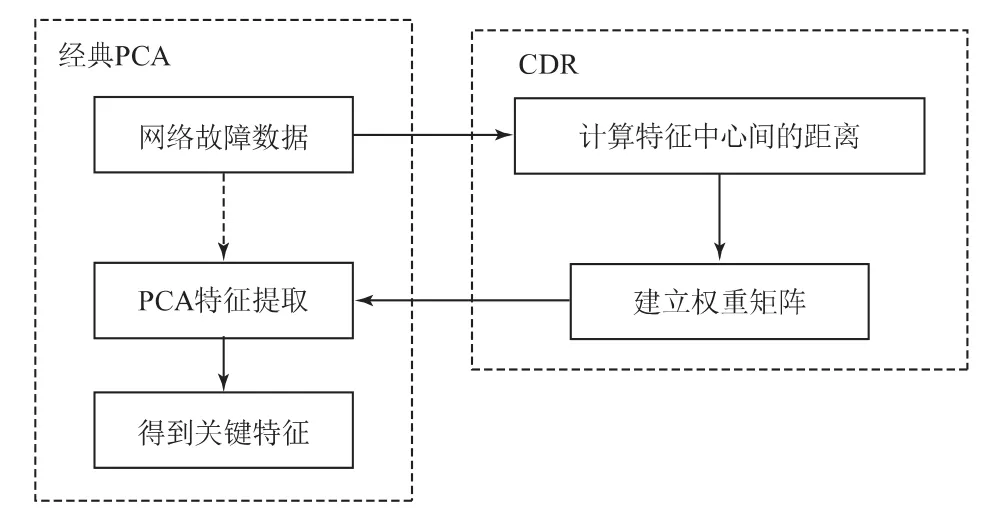
图2 基于CDR-PCA特征提取流程图
文献[1]主要是通过计算每维特征的中心距离比值来衡量特征间的差异,然后根据比值来生成权重系数,对关键的特征乘以较大的权重系数使其得以保留,能够提高故障的识别率。
评价:
(1)该方法由于引进了距离和权重因子,增加了计算的复杂度,影响了故障诊断时效性。
(2)选择合适的系数因子η在CDRWPCA特征提取中,对于特征降维和最终对分类的影响都是非常关键的。如果η超过一定的范围,故障识别率就会变得不理想。但是文献中并没有进一步去说明如何选择最优的权重因子,这样会导致模型的泛化性能较差,无法完全实现智能化。
3 控制网络故障的识别
网络故障识别的核心问题包括两个:知识库的建立和识别方法。对应这两个问题,现在的研究重点包括故障特性研究和识别方法研究。本文主要对识别方法进行讨论,选取了以数据驱动为核心的机器学习方向,挑选了近年比较主流的神经网络和支持向量机算法进行概述分析。
3.1 基于神经网络的故障识别方法
3.1.1 基于改进BP神经网络的故障诊断方法
文献[2]提出了一种基于改进BP神经网络的故障诊断方法,通过对控制网络故障信息样本进行训练,利用神经网络自适应能力,建立从控制网络采集到的故障信息到故障诊断结果的复杂映射关系,提高故障诊断的有效性跟准确性。
评价:
(1)BP神经网络的方法容易陷入局部最小甚至是发散。
(2)神经网络训练效率低。计算迭代的速度较慢,单次网络训练时间较长。文献[2]在实例分析验证时需要经过140次训练才可达到设定的精度。
(3)故障数据及特征重叠冗余。在实际网络的采集过程中不可避免地会产生冗余样本,如果对这些样本进行训练,不但不会提高模型的准确性,反而会影响神经网络的训练效率。因此可以尝试结合PCA处理后再对样本进行训练,模型的性能可能会更优。
3.1.2 结合粗糙集理论的神经网络方法
文献[3]结合粗糙集理论,针对不一致、不完整的采集数据进行有效的处理分析,发现数据间隐藏的关系,简化故障特征。粗糙集神经网络的故障诊断方法首先从全部故障特征中选择出最能反映网络故障本质的贡献大的特征。然后,将网络故障输入属性进行分类简化,删除冗余或者重叠的特征属性。最后,输入到神经网络中,迭代训练得出符合精度的模型。
评价:
基于粗糙集神经网络的方法主要从数据预处理方面入手,简化了故障特征,在方法论上与第2节中所提到的主元成分分析法(PCA)很类似。通过对属性的约简,神经网络的输入会更加有效,训练的步数更少,从而提高了神经网络的学习效率。并且由于结合了粗糙集,对噪声的抑制消除效果也较明显,提高了模型的识别精度。
但文献[3]并没有对神经网络本身进行调整改进,所以神经网络固有的单次训练时间较长、神经网络结构的选取容易出现“过拟合”现象等问题依旧存在,还有待去解决。
3.2 基于SVM的故障识别方法
神经网络以其良好的容错性和自适应性,已被应用于故障诊断中,在这方面也涌现出了大量的研究文献。不过神经网络存在过拟合以及陷入局部最优等问题,同时工业控制网络中正常样本多,故障样本少。支持向量机(SVM)是一种专门针对小样本的机器学习方法,并且其在处理非线性和高维数据时的精确度和泛化性能也很好,因此接下来本文将概述支持向量机的诊断流程及其性能。
3.2.1 基于LSSVM的网络故障诊断算法
文献[4]中提及的LSSVM即最小二乘向量机,LSSVM与经典的支持向量机区别在于,LSSVM把原方法的不等式约束变为等式约束,从而大大方便了Lagrange乘子α的求解,原问题是QP问题,而在LSSVM中则是一个解线性方程组的问题。文献中的LSSVM网络故障诊断流程与上文提及的神经网络算法基本一致,首先是故障数据采集,通过PSO粒子群算法确定LSSVM的最优初始参数,对故障数据进行预处理,然后输入到LSSVM进行训练,最后对模型进行交叉验证。
优点:
文献[4]最后的测试集验证中,针对小样本的网络故障诊断,LSSVM的诊断精度要明显高于BP神经网络,训练速度也更快。
不足:
(1)文献中对于支持向量机中关键的核函数选取并没有进行详细讨论;
(2)只对一个测试集进行验证,并且是一个小样本的数据集,本身就具有很大的随机性,应对多个不同的网络故障数据集进行验证;
(3)故障诊断中客观存在大量不确定信息,算法处理效果将大受影响。
3.2.2 基于模糊集的双重支持向量机网络故障诊断方法
为了进一步提高支持向量机的泛化性能,文献[5]进行了两次SVM训练,第一次SVM训练通过类中心确定近似的最优分类面,而第二次SVM训练主要是为了让模型稀疏化,但是由于样本的减少,噪声以及故障数据的不确定性对分类面的影响也会增大。
针对故障诊断中数据不确定性和噪声的影响,文献[5]将模糊理论在处理不确定性上的优势与SVM相结合,在第二次SVM训练中引入模糊因子。模糊集给每个样本都赋予一个模糊隶属度,这样不同的样本对决策函数的学习都有不同的贡献,从而减少了外部的影响,提高了故障诊断的精度(图3)。
评价:
(1)时效性高,泛化性能好。对比经典SVM,Dual-SVM经过两次训练后,模型稀疏化,支持向量个数少,诊断模型更加简单,训练时间远少于SVM。
(2)故障诊断模型精度高。由于结合模糊化理论,克服了数据不确定性和噪声的影响。文献[5]对3组样本进行了训练,故障模型诊断精度并没有因为泛化性能的提高而下降。
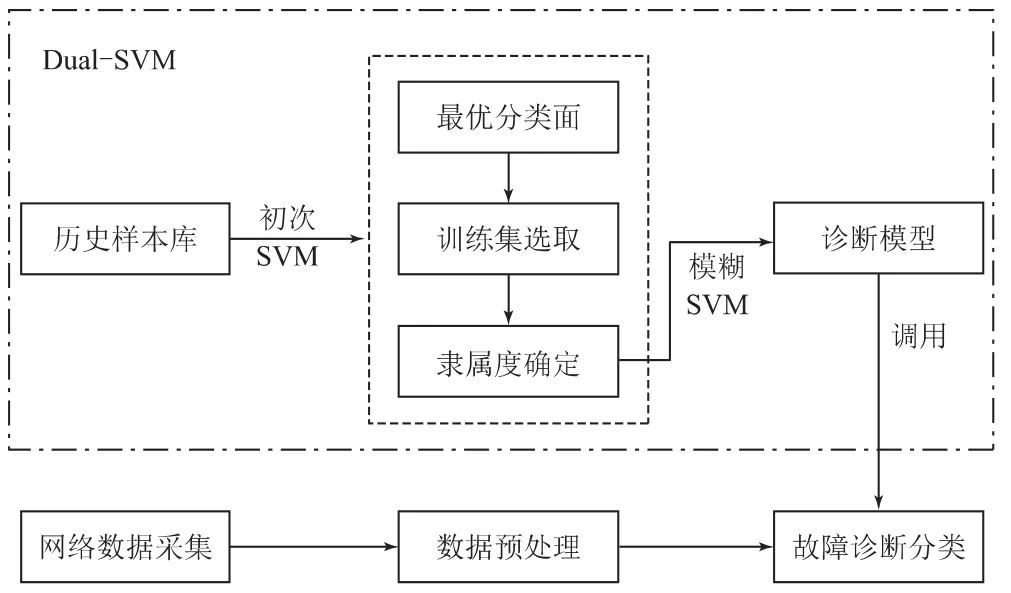
图3 基于模糊集的双重支持向量机网络故障诊断流程图
(3)不过该文献并没有对支持向量机的核函数选取进行说明,是本文比较遗憾的地方。
4 总结与展望
通过研究近年来国内外关于控制网络故障诊断方面的文献,本文针对故障特征提取、故障识别方法进行了概述和分析,讨论了目前研究中存在的不足和需要改进的方向。随着控制网络的快速发展,使用单一的方法、从单一的角度进行故障诊断已不能满足要求。故障诊断方法的发展趋势大概有如下两点:
(1)综合化。由于控制网络设备的复杂化和故障的不确定性,用一种算法已不能满足控制网络可靠性和故障诊断高效性的要求,所以需要综合多种算法,取其精华,克服其不足,来提高控制网络故障诊断的智能化水平。
(2)机器学习。利用机器学习来丰富故障知识库,形成、丰富故障诊断模型,对专家系统知识库进行补充,使故障诊断变得更加高效、准确。
