仿人机器人运动步态策略研究
2018-11-20季可儿
季可儿
(哈尔滨市第三中学群力校区高三19班,黑龙江 哈尔滨)
机器人拥有多种类别,其中仿人机器人的发展尤为迅速。仿人机器人是依据人类外形结构特征,能够双足步行,按照指令完成一些繁杂、危险等严酷环境下的任务,或者为人类提供各种服务。由于仿人机器人相对于其他机器人的运动方式不同,是采用双脚离散、交替地支撑地面,并且能够自主选择脚与地面最佳的支撑点,因此可以减少环境对仿人机器人的限制,具有较高的灵活性。
一、零点力矩原理
仿人机器人的稳定性包括静态稳定性和动态稳定性。其中静态稳定强调的是以重心作为稳定标准,这种稳定性指标适用于静止或者移动十分缓慢的双足机器人。在机器人的实际应用过程中,可以运动的双足机器人更能满足人类的需求,因此仿人机器人动态稳定性研究相对来说更为流行。
仿人机器人整体结构如图1所示,机器人脚掌与地面的接触面称之为支撑面。两个支撑面构成的多边形面积称之为支撑面积,如图2所示。
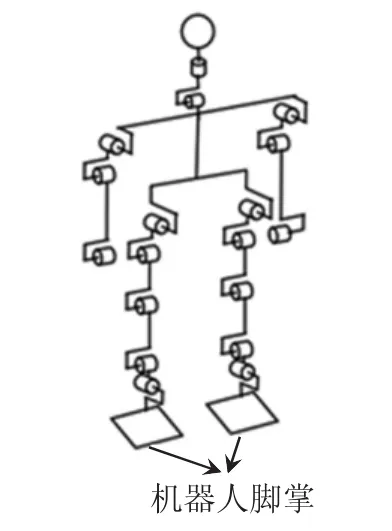
图1 仿人机器人结构图

图2 机器人支撑面积
机器人具有两种行走方式,第一种是静态行走,这种行走方式是指机器人在运动过程中,机器人左右脚掌交替支撑,可以形成一个不断变化和移动的支撑面,并且机器人的重心始终在其脚掌与地面相接处的支撑面内。第二种行走方式为动态行走,这种行走方式是指在机器人行走过程中由于其机械臂等各个“关节”的摆动,会使机器人产生惯性力,从而使得机器人的重心可能会周期性落在支撑面以外,重心到地面的投影落在支撑脚所围成的多边形外部时,机器人处于不稳定状态。许多学者将零点力矩作为仿人机器人动态稳定性的判定标准,其主要原理如下:零点力矩原理就是确保机器人的重力和惯性力的合力在地面上的投影,这个投影点的合力的力矩为零。
二、仿人机器人运动步态规划策略
仿人机器人是以人类肢体结构为参照对象进行设计的,其动作也主要是模仿人类的行走方式。但由于机器人所具有的自由度与人类相差较大,所以不能完全按照人类的行为举止来规划机器人的行走姿态。必须结合机器人自身的结构特点,通过设定一些假设和约束条件使机器人实现稳定步行。
(一)机器人肢体直立规划策略
仿人机器人的支撑主要靠其面积较大的脚掌,与人类正常行走时相同,机器人在整体设计中应保证机器人在行走过程中身体始终与地面垂直。机器人行走过程中的姿态越接近人类的行走方式时,其稳定性越好,协调性更强。
图3给出了仿人机器人运动时各个关节处的夹角,为保证机器人能够实现稳定的运动,并保证机器人身体与地面垂直,则必须满足以下规划条件:

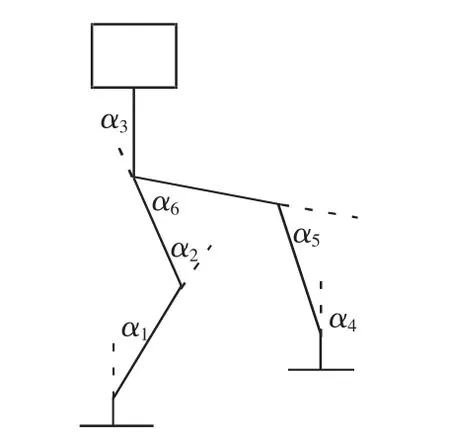
图3 机器人稳定步行规划条件
(二)机器人脚掌落地规划策略
从人类行走过程中可以发现:人类运动时,一只脚抬起向前迈步时,脚后跟先着地,然后转化到整个脚掌,与地面接触的脚掌是脚后跟先离开地面,然后过渡到整个脚掌。这种行走方式取决于人类的脚有肌肉和骨架构成,脚掌具有较多的自由度,而机器人在设计过程中其脚掌只是一个刚性平面。如果完全按照人类的行走方式进行步态规划,就会使机器人在行走过程中脚掌与地面之间为线接触,接触面积过小,会严重影响机器人的稳定性,因此在进行步态设计时,应考虑使机器人的脚掌与地面接触时脚掌与地面平行。
根据图3所示的机器人运动模型,机器人运动时,机器人的脚掌与地面平行的规划条件为:

三、总结
通过对仿人机器人行走步态策略研究,给出机器人在静态行走和动态行走的满足身体与地面垂直,脚掌与支撑面水平的规划策略时,机器人能够很好地、拟人化地进行行走。通过合理设计机器人的骨架结构,机器人可以完成前进、后退,左右移动等多种动作,并且机器人系统具有较强的稳定性。因此,目前仿人机器人大多数为动态行走策略,仿人机器人稳定性分析可以为未来研究机器人奔跑步态的研究提供一定的借鉴意义。
