四轮定位仪校准装置的安装水平度引入的误差
2018-11-19上海市汽车运输科学技术研究所
/ 上海市汽车运输科学技术研究所
0 引言
机动车四轮定位是指车轮前束角、车轮外倾角、主销内倾角、主销后倾角。四轮定位数据的准确与否(特别是在高速行驶的情况下)对机动车的行驶安全性(方向轮的自动回正、方向盘的操纵力大小、操纵的平顺性)、乘坐的舒适性、减少轮胎和机件的异常磨损等具有决定性的作用。
四轮定位仪是汽修企业目前普遍采用的针对机动车四轮定位的专业维修检测设备,因而四轮定位仪的检测数据准确与否将直接关系到被修车辆的四轮定位数据的准确性,关系到维修的质量和维修的效率,所以必须根据国家有关法规规章,依照JJF 1154-2014《四轮定位仪校准规范》等相关标准,通过定期量值溯源(校准)来确保四轮定位仪检测数据的准确可靠。然而,由于市场上四轮定位仪的品牌和规格型号繁多,如何提供更准确的校准服务,将有待于在日常的实际操作中不断地进行探索。由于JJF 1154-2014只对校准装置的计量性能做了规定,而在日常工作实践中发现校准装置支架安装的水平问题会对整个校准过程产生不可忽略的影响,有必要将其独立出来进行分析和探讨。以下主要讨论的是四轮定位仪校准装置在安装过程中由支架水平度引入的误差分析。
1 计量性能
四轮定位仪校准装置是对四轮定位仪的车轮前束角、车轮外倾角、主销后倾角、主销内倾角等参数进行校准检测的专用设备,其最大允许误差MPE:±1′,对于被校准的四轮定位仪的性能参数如表1所示。
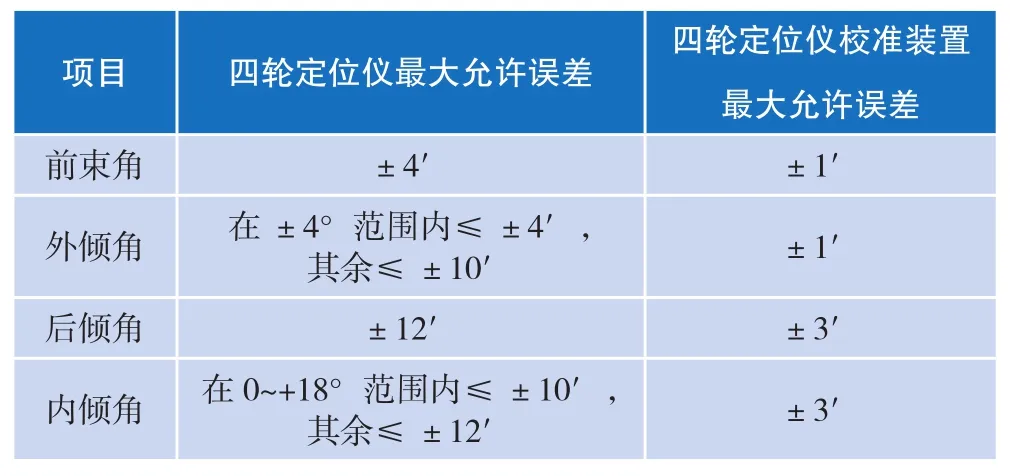
表1 被校准的四轮定位仪的性能参数
2 测量模型
以被检四轮定位仪示值x,四轮定位仪校准装置示值x0为输入量,四轮定位仪示值误差Δ为输出量的测量模型:
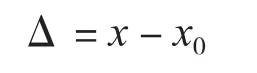
式中:Δ—— 被检四轮定位仪车轮倾角的示值误差,(′ );
x—— 被检四轮定位仪3次测量示值的算术平均值,(′ );
x0—— 四轮定位仪校准装置标准值,(′)
由于各分量彼此独立不相关,对各分量求偏导后,可得角度相对标准不确定度的表达式:

3 标准不确定度来源
1)四轮定位仪示值重复性引起的不确定度分量uA(x) (A 类不确定度评定 )。
2)四轮定位仪校准装置本身的准确度引入的标准不确定度分量u1(x0) (B类不确定度评定)。
3)由安装四轮定位仪校准装置支架产生的水平度引入的不确定度分量us(x0) (B类不确定度评定)。
4 输入量的标准不确定度评定
4.1 被检四轮定位仪示值x估计值的标准不确定度评定uA(x)
被检四轮定位仪示值x估计值的不确定度主要来源于四轮定位仪的测量结果重复性及数显仪器的示值量化误差。
测量结果重复性(车轮前束角)可以通过连续测量得到测量列,采用A类评定方法进行。
在标准装置及被检四轮定位仪的车轮前束角为2°时正常工况条件下,在重复性条件下测量10次所得结果见表2。
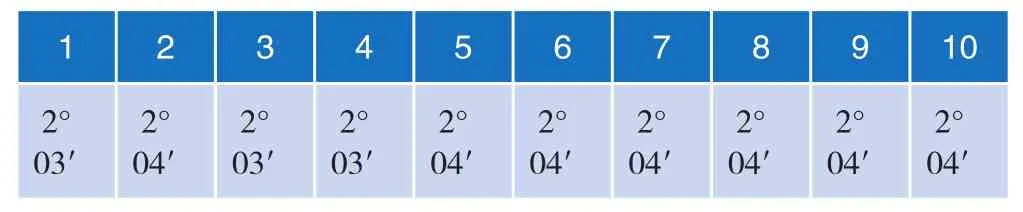
表2 车轮前束角重复测量结果
单次测量实验标准差:
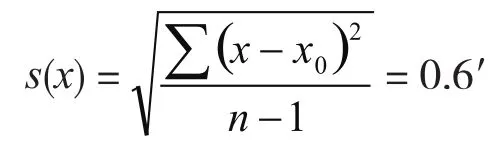
实际测量时,每一测量点只测量3次作为测量结果,则可得标准不确定度为
4.2 被检四轮定位仪示值估计值(数显量化误差)的标准不确定度评定
根据JJF 1154-2014规定,被检四轮定位仪的分辨力基本上均为1′,其量化误差以等概率分布(矩形分布)落在宽度为1′/2 = 0.5′的区间内。考虑其引入的标准不确定度为
由于测量结果重复性分量包含数显量化误差等引入的不确定度分量,为避免重复计算,只计最大影响量uA(x),舍弃u1(x)。
4.3 四轮定位仪校准装置本身的准确度引入的标准不确定度分量u1(x0)
根据规程规定,检定用标准装置的最大允许误差±1′,并以接近均匀分布估计算。
4.4 重复性与标准装置准确度的不确定度分量见表3。
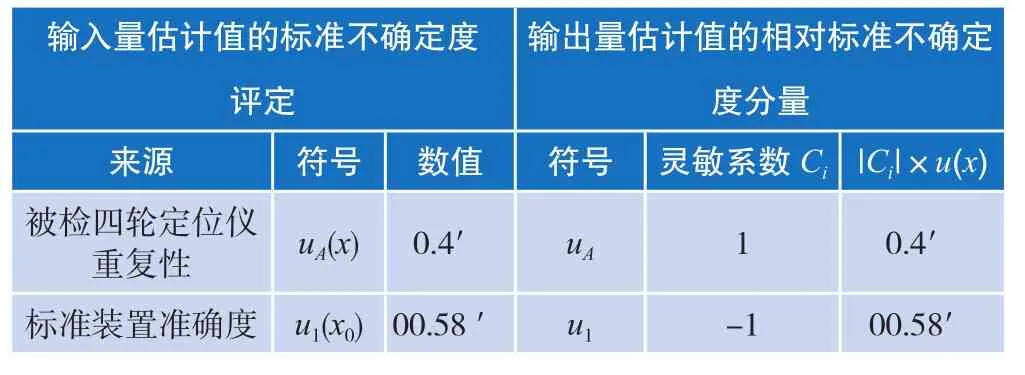
表3 重复性与标准装置准确度的不确定度分量
4.5 合成标准不确定度的计算
4.6 扩展标准不确定度的计算
因主要分量可视为正态分布,因此p= 95%时,可取包含因子k= 2,则:
U= 0.7′×2 = 1.4′
由四轮定位仪前束角的最大误差为4′,只要扩展不确定度在1/2到1/3之间,2′>1.4′,可以认为测量的结果误差还是可靠的。
通过计算已经得出uA(x)和u(x0)的不确定度评定分量,可以看出uA(x)对于整个测量不确定度评定的影响,A类不确定度评定结果还是会受到被校四轮定位仪自身性能的影响,但这不是此次误差分析的重点。把由安装四轮定位仪校准装置支架产生的水平度引入的不确定度分量us(x0)对于整个标准装置不确定度评定所产生的影响作为此次误差分析的重点。可假设一个绝对完美的被测物,将重复性引起的标准不确定度无限接近于零(以后的计算公式中uA= 0,不再具体说明了),将校准装置本身的准确度u(x0)和支架安装水平度us(x0)的不确定度进行合成,来探讨支架安装水平度us(x0)对于整体测量过程中的影响是不是一个非常关键的并且无法被忽略的重要因素。
5 输入量的标准不确定度评定(支架水平度)
安装四轮定位仪校准装置支架的水平度,在规程中没有被特别的要求,但还是存在一定的风险隐患,这里用三种可能发生的情况来证明支架水平度是足以影响整个测量过程的。
5.1 地面对于四轮定位仪校准装置支架水平度的影响
对于地面的水平校准,通常用条式水平仪来进行水平的调整(见图1、图2),规程对其准确度没有严格的规定,这里以工作中常用的0.05 mm/m和0.02 mm/m为例加以分析。

图1 0.02 mm/m条式水平仪

图2 四轮定位仪校准装置支架
(1)由0.05 mm/m条式水平仪准确度引入的不确定度分量us(x01)
由0.05 mm/m水平仪的分度值读数,以1 m计算水平仪的分度值为0.05 mm/m,校准员的估读误差为1/10分度,其误差为0.005 mm/m(相当于1′),设其满足均匀分布,k= ,则:
0.05 mm/m条式水平仪与标准装置准确度的不确定度分量见表4。
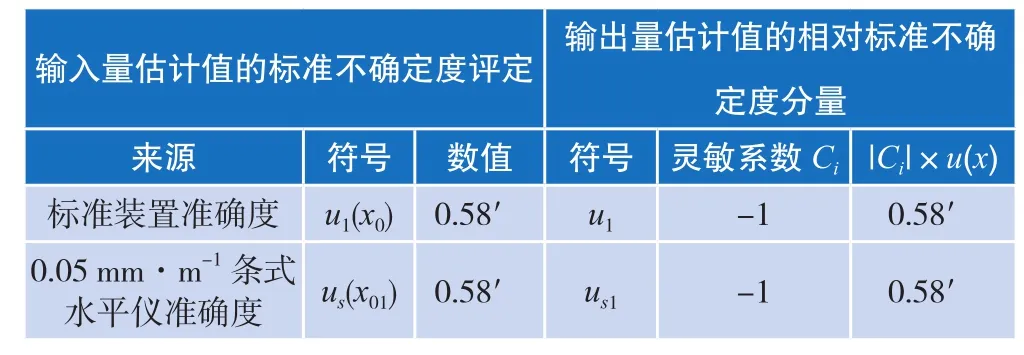
表4 0.05 mm/m条式水平仪与标准装置准确度的不确定度分量
合成标准不确定度的计算
扩展标准不确定度计算
因主要分量可视为正态分布,因此p= 95%时,可取包含因子k= 2,则:
U1= 0.8′×2 = 1.6′
由此可以看出0.05 mm/m水平仪的估读误差对于测量的影响,按1/10估读误差是非常小的,基本上已经是肉眼可以判断的极限,实际操作上需要工作人员高度仔细。
如果降低一点要求,按1/5作为估读误差(具体计算就不再重复了),其误差应为0.01 mm/m(相当于2′),计算结果的扩展不确定度U1= 2.6′,超出了2′,测量结果是不理想的。
(2)由0.02 mm/m条式水平仪准确度引入的不确定度分量us(x02)
由0.02 mm/m水平仪的分度值读数,以1 m计算水平仪的分度值为0.02 mm/m,校准员的估读误差为1/10分度,其误差为0.002 mm/m(相当于0.4′),设其满足均匀分布,k= ,则:
0.02mm/m条式水平仪与标准装置准确度的标准不确定度分量见表5。
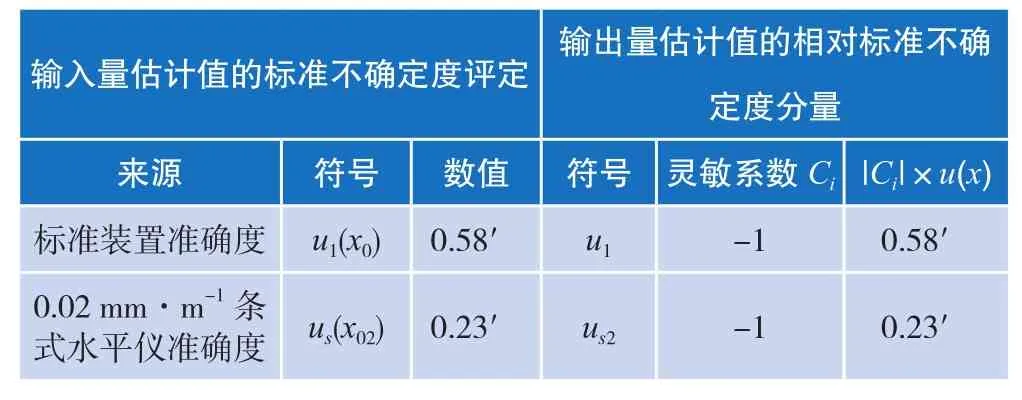
表5 0.02 mm/m条式水平仪与标准装置准确度的标准不确定度分量

扩展标准不确定度计算
因主要分量可视为正态分布,因此p= 95%时,可取包含因子k= 2,则:
U2= 0.6′×2 = 1.2′
由些可以看出0.02 m/mm水平仪的估读误差对于测量的影响,按1/10估读误差时其U2值还是比较小的。由进一步放大到1/5进行估读(降低对人员的要求),其误差为0.004 mm/m(相当于0.8′),计算结果显示其扩展不确定度U2= 1.2′没有超过2′,测量结果还是可以的。
综合评价一下两种水平仪,0.05 mm/m的水平仪对于校准人员要求极高,理论上可以使用,但实际使用很困难;0.02 mm/m的水平仪在1/5估读时,误
合成标准不确定度的计算差可控,对于校准人员要求也合理,但误差还是不尽理想,在条件允许的情况下,应配置准确度更高的水平仪,如数字显示的0.01 mm/m水平仪等。
5.2 传感器挂载对于四轮定位仪校准装置的水平度的影响
对于零位校准,如图3所示,需要将连杆和被检设备的传感器放在浅色区域,这时连接在一根横杠上,校准零位时是很稳定的;但在将传感器与连杆装在深色的测量机构上时,就会出现一个问题,由于测量机构是一个齿轮结构,按杠杆原理(力臂过长或传感器过重)理论上都会导致向下倾斜,这种向下倾斜会不会对整体测量有影响,可以引用地面对于四轮定位仪校准装置支架的水平度影响得到的相关数据进行分析。

图3 四轮定位仪校准装置测量机构
由传感器挂载产生的水平度引入的不确定度分量us(x03)
如果倾斜度大于2′,设其满足均匀分布,k=,则:
传感器挂载与标准装置准确度的标准不确定度分量见表6。
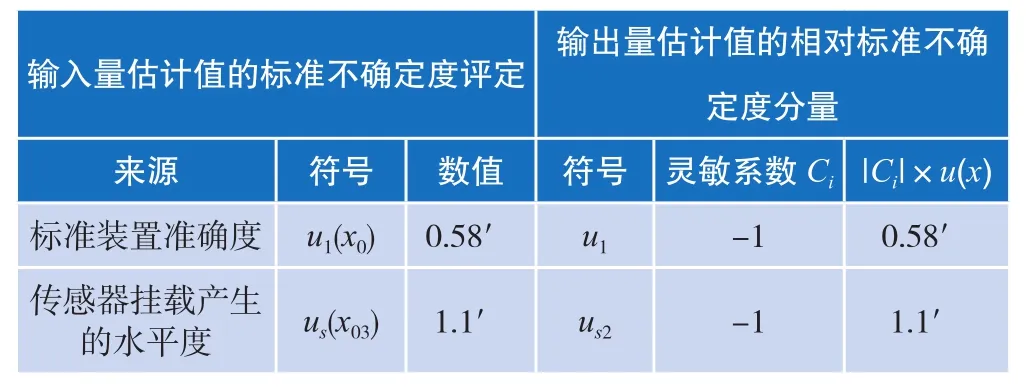
表6 传感器挂载与标准装置准确度的标准不确定度分量
扩展标准不确定度计算
因主要分量可视为正态分布,因此p= 95%时,可取包含因子k= 2,则:
合成标准不确定度的计算
U3= 1.2′×2 = 2.4′
扩展标准不确定度U3=2.4′(超出了2′),测量结果是不理想的。
综合评价一下,传感器挂载误差需要校准员对于具体的四轮定位仪传感器的各种情况进行随机应变的处理。这里主要需明确一点,就是在挂载到蓝色的测量机构时,感觉出现了向下倾斜,不要错误地认为一点点向下倾斜是不会影响整体测量的,因为即使只有2′这样很小的倾斜度,也会对测量结果产生影响。所以在工作时发现一点点向下倾斜,就要加以足够的重视,这会对测量结果产生比较大的影响。是不是可以通过某些手段来加以调整,如用更短的连杆或去除传感器上一些不必要的附载等,要多观察,不要装好就开始测量,在确定基本消除倾斜后才可以进行测量。
5.3 3D四轮定位仪台架举升对于四轮定位仪校准装置的水平度的影响
3D四轮定位仪是在校准中遇到的比较特殊的一种设备,它区别于以前的那种可以分离的传感器,对于工作区域有严格的要求,导致其无法在落地状态下(图4)进行测量,只有举升状态下(图5)3D四轮定位仪才能进行测量。

图4 四轮定位仪落地状态

图5 四轮定位仪举升状态
以正常的校准工作流程,校准装置需要在地面将四轮定位仪传感器进入浅色区域进行零位校准,再将传感器放在深色区域的测量机构上进行校准测量(见图3),但在3D四轮定位仪校准工作中,如果你在地面未举升(见图6)的3D四轮定位仪台架(简称台架)已经进行了零位校准,但由于四轮定位仪传感器必须被探头检测到,就必须对台架进行举升作业(见图7),这时就会发生一个问题,台架的举升结构的水平度会对测量结果产生一定的影响。
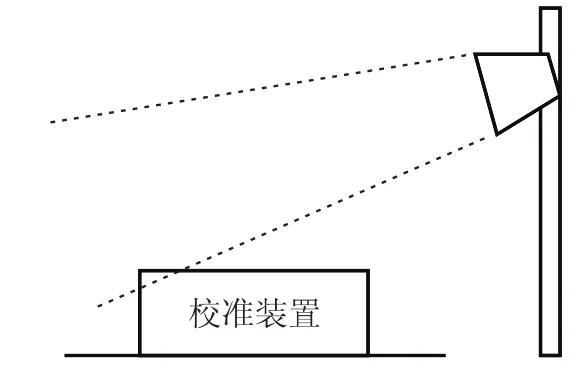
图6 校准装置未举升
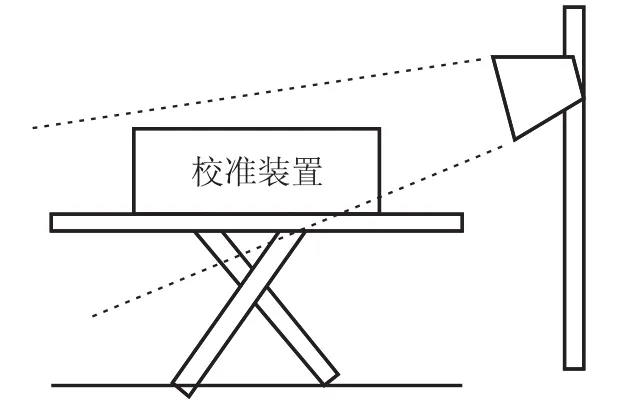
图7 校准装置已举升
由3D四轮定位仪台架举升产生的水平度引入的不确定度分量us(x04)
从长期工作经验来看,台架举升的前后误差比较好的是控制在1 mm左右,如图8所示,以此为例来计算一下长5 m的台架,有1 mm的高低差对于整个测量的影响。
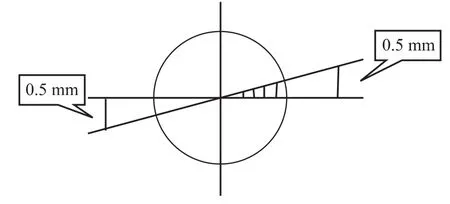
图8 台架前后1 mm高低差形成的倾斜夹角
通过三角函数可以计算出台架的倾斜夹角,约为7′左右。设其满足均匀分布,k=,则:
台架举升与标准装置准确度的标准不确定度分量见表7。
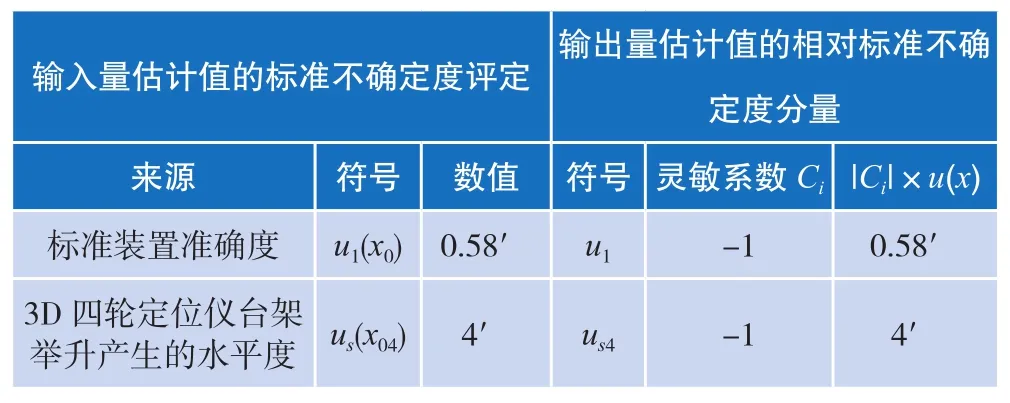
表7 台架举升与标准装置准确度的标准不确定度分量
合成标准不确定度的计算
扩展标准不确定度计算
因主要分量可视为正态分布,因此p= 95%时,可取包含因子k= 2,则:
U4= 4′×2 = 8′
而四轮定位仪前束角的最大误差为4′,但8′> 4′,可以认为测量的结果肯定是有问题的。
有没有办法解决这个台架举升过程中带来的水平度的误差,如可以在台架举升到位后再进行零位校准,用来消除水平误差,这种方法是可行的,但要注意以下三个问题:
(1)台架上的水平校零不比地面,地面上可以通过选择比较平整的地方,但台架上校零只能在相对于台架上固定的区域(传感器接收区),台架自身的水平度有可能超过校准架自身可以修正的极限,没办法校零。
(2)在台架上已经将水平度控制好,也进行了零位校准,传感器也可以接收到信号,这就可以将传感器放到测量机构上。此时如果发生了传感器接收信号不好,通过简单的传感器面板的上下翻动也无法解决,而需要对校准装置进行前后移动或台架上下调整,其上一次的水平调整是失效的,要重新进行定位。也就是说台架上调整时必须找到一个能让零位和测量机构都能完好接收信号的一个位置,虽然两者不在一个平面上,但因为距离较近,只要安装前先进行定位,在确认两个平面的信号接收良好后,再进行水平度控制和校零位。但如果遇到定位不了一个比较好的区域,两者无法同时满足的极端条件,还是应该放弃此次检测。
(3)由于前束角和外倾角都集中在校准装置前面,在检测到一半时需要将四轮定位仪传感器进行交换(前轮两个和后轮两个交换位置),如果对台架进行了高低举升,都应该重新进行水平度控制和零位校准,不要用自己的主观感觉好像是上次那个高度或用传感器的接收情况来判断,几分的水平度误差基本无法察觉,科学的方法还是再检查一下,以保证数据的可靠性。
综合评价一下,台架上的检测有着极高的要求和很大的风险,需要大量的时间进行风险控制,时间成本巨大,以目前的装置水平不建议在台架上进行检测。不过未来台架上的检测肯定是趋势,四轮定位仪越来越作为一个整体(台架和传感器的一体化)出现在这个行业,3D四轮定位仪就是一个典型代表,这需要计量行业在设备上进行突破,期待以后可以有四个测量机构分离、直接放置在台架上、自动调水平、远程控制转动角度的校准装置的出现。
6 结语
四轮定位仪校准装置的安装水平度引入的误差不仅需要校准员拥有熟练的操作技能和仔细的工作作风,也需要校准装置性能的持续改进。相信这些问题和困难是计量人员努力奋斗加以攻克的目标,也将在未来随着计量科学技术的不断进步而得到解决。
