空中飞行目标三维航迹的分析与仿真
2018-11-17向祖鹏董正宏杨帆
向祖鹏,董正宏,杨帆
(航天工程大学航天信息学院,北京 101400)
0 引言
随着现代战斗机飞行性能、攻击能力、隐身性能及计算机技术的不断提高,现代化的空中目标对抗越来越表现出快节奏、小规模、难以预测等特点。传统的空中作战样式中,飞行员主要依靠自身经验对敌方目标未来时刻位置和状态信息进行预测,这种方式明显不满足现代化空战的需求。而计算机技术及仿真软件为我们研究现代空战提供了方便的途径。对目标航迹的分析、模拟与仿真是研究目标飞行特性、进行目标信息预测的第一步。目前国内外对目标航迹进行分析与模拟时,多数将其看成简单的直线运动或圆周运动及其组合[2-8],没有考虑其他复杂情况,也很少将速度纳入航迹分析中,而有些只研究了个别典型航迹[9],都未能充分描述战机的一些实际情况。根据空中飞行目标运动的实际情况,考虑将椭圆弧航迹引入航迹模拟中,并将航迹归为四类:直线航迹、水平面内弧线航迹、铅垂面内弧线航迹和复杂航迹。通过对四类航迹进行分析,建立各类航迹的数学模型,并设置相应参数值对模型进行仿真。
1 空中飞行目标的航迹分析
随着战机性能尤其是机动性的提升,对其整个航迹的分析与模拟难度较大,但可以通过对整个航迹进行分段,分为短途航迹,再将每一段航迹进行分解,最后合成为总的航迹。笔者按照航迹的复杂程度,考虑将目标的飞行航迹归为四类:空中直线航迹、水平面内弧线航迹、铅垂面内弧线航迹和复杂及不规则航迹,其中前面三种为基本航迹。考虑空战实际范围和研究的方便,首先假定前提条件如下:①大地坐标系,且向上为正;②简化战机模型为质点,且质量恒定;③忽略地球曲率,将其看成平面。从以上假定出发,下面将分别对目标的航迹进行分析,为目标航迹仿真数学模型的建立提供依据。
1.1 空中直线飞行
空中直线飞行是目标飞行时最常用的航迹,也是目标巡航最常用的飞行方式。按照加速度是否发生变化,直线航迹可以分为等加速度直线飞行和变加速度直线飞行;按照飞行时目标高度是否变化,可以将直线飞行分为水平面内直线飞行和铅垂面内直线飞行。
1.2 水平面内弧线飞行
水平面内弧线飞行是战机在执行空中巡逻和侦察等任务时常用的飞行方式。在水平面内进行弧线飞行时其高度保持不变,其轨迹为圆弧或者椭圆弧一部分。
1.3 铅垂面内弧线飞行
铅垂面内弧线飞行是战机实施俯冲攻击及迅速跃升等动作时常用的飞行方式。铅垂面内弧线飞行时其航迹在一个平面内且此平面垂直于水平面。
1.4 复杂航迹飞行
以上三种基本飞行方式组合而成的复杂飞行航迹AC如图1所示,可分解为AB与BC段。其中AB段水平面内直线飞行,BC段为弧线飞行,BC段又可分解为水平面内的弧线BC2与直线C2C合成或铅垂面内的弧线BC1与直线C1C合成。另外,常见的还有螺旋式上升航迹,可以分解为水平面内匀速圆周运动与沿铅垂轴的匀速直线运动。
2 四种飞行航迹数学模型的建立
通过以上对四种航迹的分析,分别建立了四类飞行航迹的数学模型。
2.1 空中直线飞行
空中直线飞行允许多次变速飞行,只需保持加速度与速度沿同一条直线即可。所以对于多段变加速度直线飞行,可以采用分段描述运动过程的方法。
直线飞行段可以通过平移处理将A点移至原点处,AB与H轴夹角为γ(0≤γ≤π),AB在水平面的投影与X轴夹角为∂(0≤∂≤2π),如图2所示。

图1 复杂飞行航迹示意图

图2 空中直线飞行示意图
另外,假设直线飞行AB段经过n次加速,加速度分别为aB1,aB2,...,aBn-1,aB,下面以第一段为例,进行建模运算。
结合图6,设初始点A(xA,yA,HA),速度为vA,加速度为aB1,第一段运动时间为tB1,则:

公式(1)即直线航迹飞行坐标的基本公式。后面的计算以此类推,直至计算到B点位置坐标及速度。
2.2 水平面内弧线飞行
水平面内弧线飞行指的是目标保持一定高度上其航迹为圆周及圆的一部分或椭圆及椭圆的一部分。
(1)航迹为圆周或其一部分
如图3所示,AB和CD段为直线航迹,AB为平行于坐标轴的水平航迹,飞行到B点后假设目标以B点速度做匀速圆周运动。已知B(xB,yB,HB),速度为vB,圆周运动半径为R(R大于目标最小转弯半径),转角为α(0≤α≤2π),则可先求得P点坐标:

其中,加减分别表示沿y轴正向和负向。角速度ω=vBR,则α=ωtC=vBtCR此时运动到C点。圆周BC的运动方程为:

C的坐标由公式(3)求得,其中公式(3)中减号与加号分别表示B点出加速度沿y轴正向和负向,且vC=vB。
(2)航迹为椭圆弧或其一部分
如图4所示,AB和CD段为直线航迹,AB为平行于坐标轴的水平航迹,飞行到B点后假设目标均匀的角速度ω沿椭圆弧运动到C,椭圆长轴和短轴分别为2a和 2b(a>b),转过角度为 α(0≤α≤2π),α=ωtC。则P点位置坐标为:

图3 航迹为圆周及其一部分

图4 航迹为椭圆弧及其一部分

公式中加减分别表示沿y轴正向和负向。根据椭圆参数公式可得椭圆弧BC的运动方程为:

公式y=yP∓bcos(ωt)中减号与加号分别表示沿y轴正向和负向。且在任意时刻其速度可由微积分:

则速度大小为:

可得C点速度为:

2.3 铅垂面内弧线飞行
铅垂面内弧线飞行指的是目标航迹在垂直于水平面的一个面内,其航迹为圆周及圆的一部分或椭圆及椭圆的一部分。铅垂面内弧线飞行与水平面的情况类似。
(1)航迹为圆弧或其一部分
铅垂面内航迹为圆弧的示意图如5所示。AB与CD均为直线飞行段,BC为圆弧段,圆心位于P,半径为R(大于目标最小转弯半径),由B到C为等速飞行,沿X轴正向飞行,且两段直线航迹均与圆相切。设目标到达 B(xB,yB,HB),速度为 vB,转角为 α(0<α≤2π),俯冲角(速度方向与水平面夹角)为 β(0<β<π 2)。圆弧局部示意图如图6所示。

图5 铅垂面内圆弧航迹示意
则可先求得P点坐标为:

上述公式中加号与减号分别表示向下俯冲高度降低与向上拉起高度上升的情况。角速度ω=vBR,则α=ωtC=vBtCR此时运动到C点。结合图6,考虑圆部分任意点M,则圆弧BC的运动方程为:

上 述公式 H=HP∓Rcos(β-ωt)=HP∓Rcos(vBtR-β)中减号和加号分别表示向下俯冲高度降低与向上拉起高度上升的情况。C的坐标由公式(10)求得,且vC=vB。
(2)航迹为椭圆弧或其一部分
如图7所示为铅垂面内椭圆弧运动航迹。目标在X轴方向上沿正向运动,先以直线AB飞行到B点后沿椭圆弧BC运动到C点,再沿直线CD运动。为了方便起见,椭圆长轴平行于X轴,假设目标以均匀的角速度ω从B(xB,yB,HB),沿椭圆弧运动到C,椭圆长轴和短轴分别为 2a和 2b(a>b),在椭圆上经过角度为α(0<α≤2π),则 α=ωtC。在 B 点时速度为 vB,俯冲角(速度方向与水平面夹角)为β(0<β<π 2)。

图6 圆弧局部示意图

图7 铅垂面内椭圆弧航迹示意图

图8 椭圆弧局部示意图
椭圆弧局部示意图如图8所示。其中M为椭圆航迹中任一点,设B点对应的椭圆参数角为,为未知参数。其中表示向上拉起高度上升的情况,而表示向下俯冲高度下降的情况。
首先需要求解P点位置坐标,其求解过程如下:
根据椭圆参数公式:

而B点处椭圆切线斜率为tanβ。另外可通过椭圆方程:

两边同时对x求导,得:


再结合图8,根据椭圆参数意义,可得椭圆弧BC段的运动方程为:

公式H=HP+bsin(φ∓ωt)中减法和加法分别表示向上拉起与向下俯冲的情况。且在任意时刻其速度可由微分得到:

速度大小为:

则C点速度为:

2.4 复杂航迹飞行
复杂航迹由以上三类基本航迹组合而成。这里以两个常见复杂航迹为例。
航迹1:如图1所示,将整个航迹分解成两段AB、BC进行研究。
AB段:AB段为直线飞行为匀速运动,速度为vA=vB=v0,AB段与 X轴正向夹角为 β(假设π2≤β<π),初始坐标A(xA,yA,HA),以A点作为起始时刻,AB的运动时间为:

则在AB段任意时刻目标的位置为:

B 点坐标 B(xA-yAcotβ,0,0)。
BC段:BC段为弧线飞行,将其分解为水平面内的匀速圆弧运动BC2和沿H轴的初速为0的匀加速运动C2C,其中BC2所在圆弧示意图如图9所示。
先分析BC2段如下:

图9 椭圆弧局部示意图
由(1)的分析可知,P点坐标:


再分析C2C段:加速度为a,则:


航迹2:目标的运动在X轴方向为匀速运动,在Y轴方向为匀加速ay=a0运动,在H轴方向为变加速aH=ksint运动。目标进行变速运动初始时刻为t0,目标初速度为(vx0,vy0,vH0),初始位置(x0,y0,H0)。则目标任意时刻速度为:

速度:

坐标为:

3 各类航迹的模拟与仿真
在对以上四类飞行航迹进行数学分析的基础上,考虑目标飞行实际情况,设定相应的参数值,利用MATLAB对各类不同的航迹进行模拟仿真。
3.1 直线航迹的仿真
设 A(1000,500,3000),初速度 vA=200,n=2,aB1=2,aB=1,tB1=60,tB=30 ,∂=30∘,γ=80∘,则仿真输出航迹如图10所示。
3.2 水平面内弧线航迹的仿真
(1)水平面内圆弧航迹的仿真
设 B(1500,1000,4000),R=1500,vB=250,α=4π3 。则目标航迹仿真结果如图11所示。
(2)水平面内椭圆弧航迹的仿真
设 B(1500,1000,4000),a=1500,b=800,ω=0.1,α=π。则目标航迹仿真结果如图12所示,速度仿真结果如图13所示。

图10 直线运动航迹变化曲线

图11 水平面内圆弧航迹的仿真

图12 水平面内椭圆弧航迹在xoy投影

图13 水平面内椭圆弧航迹速度曲线
3.3 铅垂面内弧线航迹的仿真
(1)铅垂面内圆弧航迹的仿真
设 B(1500,1000,4000),R=1200,vB=200,α=2π3 ,β=π6。则目标航迹仿真结果如图14所示。

图14 铅垂面内圆弧航迹
(2)铅垂面内椭圆弧航迹的仿真
设 B(1500,1000,4000),a=1800,b=1000,ω=0.1,α=2π3,β=π6。目标航迹及速度仿真结果分别如图15和16所示。

图15 铅垂面内椭圆弧航迹
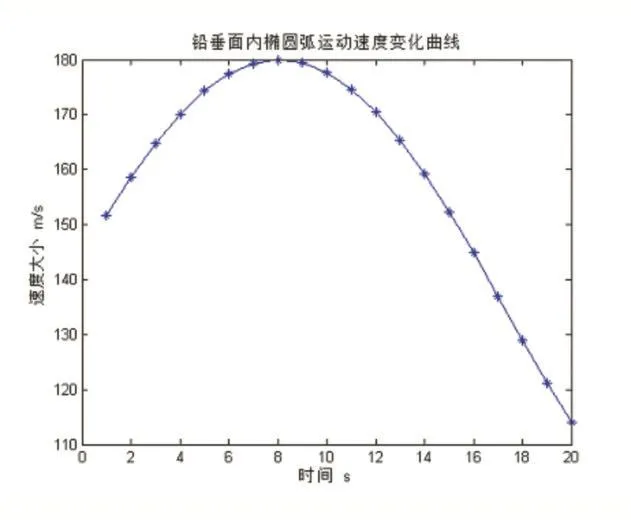
图16 铅垂面内椭圆弧航迹速度变化
3.4 复杂航迹的仿真
航迹 1:设 A(2000,-3000,0),v0=300,β=5π6,R=2000,a=8,t2=10,目标运动航迹仿真与速度仿真结果如图17和18所示。

图17 复杂航迹1的仿真

图18 复杂航迹1速度变化
航迹 2:设 A(0,0,0),v0=300,a=1,t=30,目标航迹与速度的仿真结果如图19-20所示。
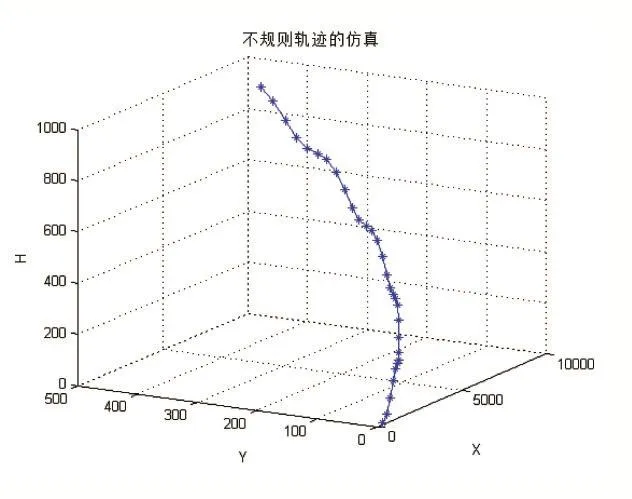
图19 复杂航迹2仿真

图20 复杂航迹2速度变化曲线
4 结语
本文将椭圆弧航迹、复杂航迹和运动速度引入航迹分析中,并依据航迹的复杂程度,将航迹归为直线航迹、水平面弧线航迹、铅垂面弧线航迹、复杂航迹四类。并建立了大地坐标系下四类航迹的数学模型,然后通过MATLAB对模型进行仿真,得出了仿真结果,结果较为理想地反映了实际航迹。本文的工作为下一步进行目标航迹和状态预测提供了支撑。