一种基于钢轨枕的中低速磁浮列车组合测速定位方法
2018-11-16黄苏苏
黄苏苏
(1. 中国铁道科学研究院通信信号研究所,100081,北京;2. 国家铁路智能运输系统工程技术研究中心,100081,北京//助理研究员)
中低速磁浮列车具有安全、环保、噪声低、建设运营维护成本低等诸多优点,其运行时车辆与轨道保持8 mm距离,被誉为“零高度飞行器”,是未来城市轨道交通发展的重要方向之一。中低速磁浮列车的研究和制造技术十分复杂,是一个国家科技实力和工业水平的重要标志。2016年5月6日正式开通的长沙中低速磁浮示范工程,是我国中低速磁浮技术首次投入运营的工程实例。
1 中低速磁浮测速定位技术现状
中低速磁浮列车的测速定位方式与其它的轨道交通大有不同。因其没有车轮,故无法像轮轨列车一样使用轮轴式传感器测量列车运动状态,也无法像高速磁浮测速那样在轨面上找到分布规律的参照物来计算列车的速度与位置[2],轨道交通中常见的测速定位方法对其都不适用。
目前,主要的中低速磁浮列车测速定位方法有以下几种:
(1) 基于交叉感应环线的测速定位方式。通过特殊排列的环线形成开口部分和闭口部分,随着列车的移动,环线开口部分对接收天线产生高电平,而闭口部分不会产生电平,由此形成周期间隔的脉冲信号。这种方式技术复杂,施工要求高,道岔区段更需要特殊处理,运营维护困难。
(2) 基于槽齿磁阻传感器的测速方式。在轨道上单独铺设槽齿测速板,车载测速系统装有磁阻电感线圈,当检测线圈经过槽齿测速板表面时,变化的电感量引起电流或电压的变化,由此检测出电机的槽齿,再利用槽齿的固定位置宽度,计算出列车速度和位置。这种方式是借鉴高速磁浮系统测速原理而来。
(3) 基于多普勒雷达的测速方式。通过反射面发射电磁波,根据多普勒移频效应计算列车运行速度。这种方式易受天气和列车运行速度影响,通常作为辅助的测速校核手段。
2 基于中低速磁浮钢轨枕的组合测速定位技术
本文提出了一种新的中低速磁浮列车组合测速定位方案,如图1所示。
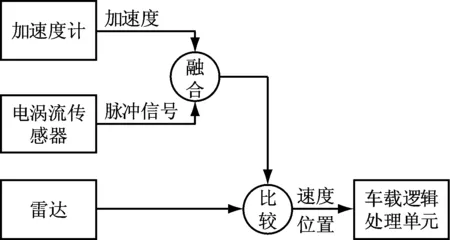
图1 中低速磁浮列车组合测速定位方案
在列车底部安装多个电涡流传感器,利用钢轨枕的材质以及钢轨枕的分布规律,通过电涡流传感器经过钢轨枕时产生的脉冲信号,结合加速度计检测到的加速度信息,计算列车运动速度,并将该速度数据与雷达的测速信息进行判断比较,共同计算出列车的实际速度与位置。
2.1 电涡流传感器
电感式涡流传感器由LC(电感电容)高频振荡器和放大处理电路组成,其利用金属物体接近这个能产生交变电磁场的振荡感辨头时,使物体内部产生涡流。这个涡流反作用于接近开关,使接近开关振荡能力衰减,内部电路参数发生变化,由此识别出有无金属物体接近,进而控制开关的通或断。 电涡流接近开关原理框图如图2所示。

图2 电涡流接近开关原理框图
正常情况下,当安装在车底的涡流传感器通过钢轨枕上方时,接近开关输出信号发生跳变,传感器输出一个脉冲信号。测速定位系统根据有无脉冲信号来判断有无钢轨枕。利用测速板采集多个涡流传感器进入同一轨枕区域的时间差t,再结合传感器的间距L,计算出列车当前时刻的运行速度v(v=L/t)。
2.2 主要计算流程
图3中给出了具体的测速定位方案:由加速度计和电涡流传感器的数据,通过一定的算法得到列车的运行速度,并与雷达的测速结果进行比较判断,最后得到精确的速度和位置信息。软件计算流程如下:
(1) 第一个电感式涡流传感器进入轨枕区域时输出高电平,测速板CPU在定时器里捕获第一个定时器的中断信号开始时间。
(2) 判断列车是否在规定的时间间隔内接收到下一个定时器的中断信号开始时间。
(3) 若接收到下一个中断信号,则计算两个信号的时间差并计算列车当前运行速度。
(4) 若等待规定时间后还未接收到下一个中断信号,则获取加速度计的当前加速度,通过涡流传感器和加速度计的数据计算当前运行速度。
(5) 比较当前速度和多普勒雷达的速度,计算两者的速度差。
(6) 判断速度差是否小于等于规定的阈值范围。

图3 软件计算流程图
(7) 若速度差在规定的阈值范围内,则取两个速度中的较大值为当前列车运行速度。
(8) 若速度差大于规定的阈值范围,则放弃当前的列车运行速度。
(9) 计算列车运行的位移。
(10) 是否接收到含有列车位置信息的应答器报文。
(11) 收到应答器报文,则更新列车位置,完成位移的校核工作。
3 试验分析
在现场试验中,通过上位机记录涡流传感器的脉冲信号。图4所示为椭圆形线圈内选取的一组涡流传感器的信号。图4中,纵坐标表示采集卡的采集通道编号(对于每一路信号,0表示未检测到信号,1表示检测到信号),横坐标表示选取的采样区域的相对时间,每个通道上升沿和下降沿之间的脉冲宽度即代表了涡流传感器有效检测到钢轨枕的时间。
在试验过程中,对10 km/h、30 km/h、50 km/h、70 km/h等匀速情况进行了详细的测试,并将这种组合测速定位方法的计算结果与精确辅助定位装置的数据进行了对比分析,如表1所示。

图4 涡流传感器脉冲波形分析

表1 组合测速定位方法与辅助定位装置定位结果对比
4 结语
值得注意的是,长沙中低速磁浮线路的钢轨枕间距为0.6~1.2 m的不均匀分布,本算法能够满足应用需求。如果钢轨枕间距过小,将导致速度出现跳变,而钢轨枕间距过大将导致速度更新延时增大,都是不理想的情况。
测试试验中,加速度计在平直轨道上能够有效反映列车加减速度的变化,可作为速度辅助修正来源。涡流传感器的有效检测范围存在较大的个体差异,使用所检测信号的中心点时间计算速度更贴近于列车实际速度(由精确辅助定位装置推算),且波动更小。考虑到长期运行后涡流传感器的性能进一步下降,需要在测速算法设计及后续测试中充分考虑误差的检测和防护。由测速结果的对比分析可知,这种测速方式的定位误差不大于2%,符合实际应用需求。
此外,这种非接触式的测速定位方案,能在不与地面接触的条件下精确测量列车速度和位置,没有机械磨损,并且有良好的稳定性和环境适应性。其不仅能够完美地解决中低速磁浮列车的测速定位问题,未来还可应用于其它非接触测量环境中。
