全自动运行信号系统与洗车机的接口方案研究
2018-11-16寇若岚
寇若岚
(1.北京全路通信信号研究设计院集团有限公司,北京 100070;2.北京市高速铁路运行控制系统工程技术研究中心,北京 100070)
1 概述
随着轨道交通控制技术的发展,越来越多的城市轨道交通工程采用全自动运行控制系统提升运营管理水平。全自动运行系统能够自动实现列车休眠、列车唤醒、自动发车、自动折返、自动进出段/场、自动停车、自动开/关车门以及在故障情况下实现自动恢复等功能。
全自动运行系统下的车辆段/停车场新增自动洗车作业。为实现全自动驾驶的相关要求,信号系统需增强设备配置,特别是增加与洗车设备的接口功能和逻辑关系,以实现全自动洗车功能。
本文主要针对联锁子系统与洗车机接口功能,以及洗车库内的作业流程进行分析,提出信号系统联锁与洗车库接口的方案。
2 全自动洗车功能
在全自动驾驶FAM模式下,洗车作业由自动列车驾驶系统(ATO)控制完成。联锁系统向洗车机发送洗车请求,收到洗车机确认回复后,ATO向车辆发送洗车模式及牵引命令,列车就位后进行洗车作业;洗车过程中,ATO控制列车定点停车及折返换端,完成特定部位的清洗;洗车完成后,ATO控制列车出清洗车库停车点,停稳后退出洗车模式。车载ATO撤销向车辆发送洗车模式的信息,根据移动授权运行回库。
自动洗车流程中,信号系统需实现洗车库库门的联锁防护。ATP提供超速防护,列车运行到洗车库前指定位置后停车;洗车完成后,联锁系统进行防护进路检查,满足条件后关闭洗车库门。
3 全自动洗车流程
3.1 洗车流程概述
1)ATS发送当天运营计划,车辆段/停车场派班室人工选择空档时间,设置待洗列车的车组号、洗车时刻。
2)待洗列车在停车列检库内停稳后,到预定义的洗车时刻ATS向具有车辆段/停车场控制权的主用中心行调或信号楼行调进行洗车提示。行调确认后自动触发至洗车库的进路。
3)打开洗车库库门:列车入库时,ATS根据洗车开始时刻提前10 min(可设定)向洗车库门发送开门命令,若联锁检查条件满足,则洗车库门打开;若洗车库门超过规定时间未打开则在行调工作站报警;当洗车机就绪且洗车库门打开且锁闭情况下,ATS按洗车计划向行调工作站提示洗车请求。
4)人工为洗车机上电,系统自动控制进行洗车。
5)关闭洗车库库门:洗车计划全部完成后,行调工作站提示是否关闭洗车库门,待行调确认后ATS向洗车库门发送关闭命令,洗车库门自动关闭。
按照洗车线类型的不同,洗车作业可分为尽头式自动洗车和贯通式自动洗车两种。受电方式分为第三轨受电和接触网受电。本文根据洗车线和受电方式的不同,归纳出两种自动洗车流程,分别进行详细的分析。
3.2 尽头式洗车库作业场景分析(采用第三轨受电)
1)人工为洗车机上电,洗车机就绪后向联锁系统发送高电平的确认信息,直到列车入库行驶到指定检测位置,洗车机开始向联锁系统发送低电平信息,表示检测到列车。
2)联锁系统采集洗车机和信号设备的状态发送给ATS系统,段/场信号调度接收到就绪信息后发送目的地号。联锁系统接收到目的地号后自动向洗车线排列进路,洗车库库门开启,列车运行至洗车机前停车。如图1所示。
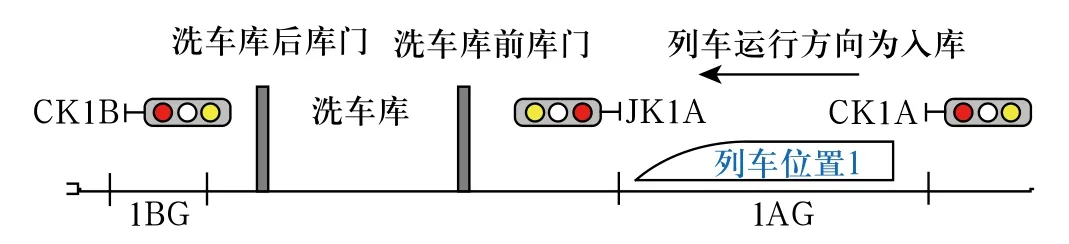
图1 列车入库前位置示意图Fig.1 The location before entering the garage
3)全自动驾驶系统模式下,信号车载设备将持续通过联锁系统向洗车机发送自动洗车请求,直到列车从洗车库尽头折返后停稳;洗车机收到请求信息后进行回复确认;车载信号接收到洗车机的确认信息后,控制列车低速运行(车速3~5 km/h)至折返轨区段如图2中1BG所示,列车进行换端并在图2中的A点停稳;车载通过联锁系统向洗车机发送洗车作业请求,洗车机准备就绪后回复请求确认;列车收到确认信息后低速运行至车头洗位B,列车停稳后如图2中列车位置3通过联锁系统发送信息给洗车机,洗车机对车头进行清洗。
4)洗车机完成前端洗车命令后,通过联锁系统向列车发送移动指令。列车继续向前运行,在此过程中洗车机对列车侧面进行清洗。
5)当列车继续运行至车尾洗位C如图2中列车位置4时,联锁系统将停稳信息转发给洗车机;收到停稳信息后,洗车机进行后端洗车流程。
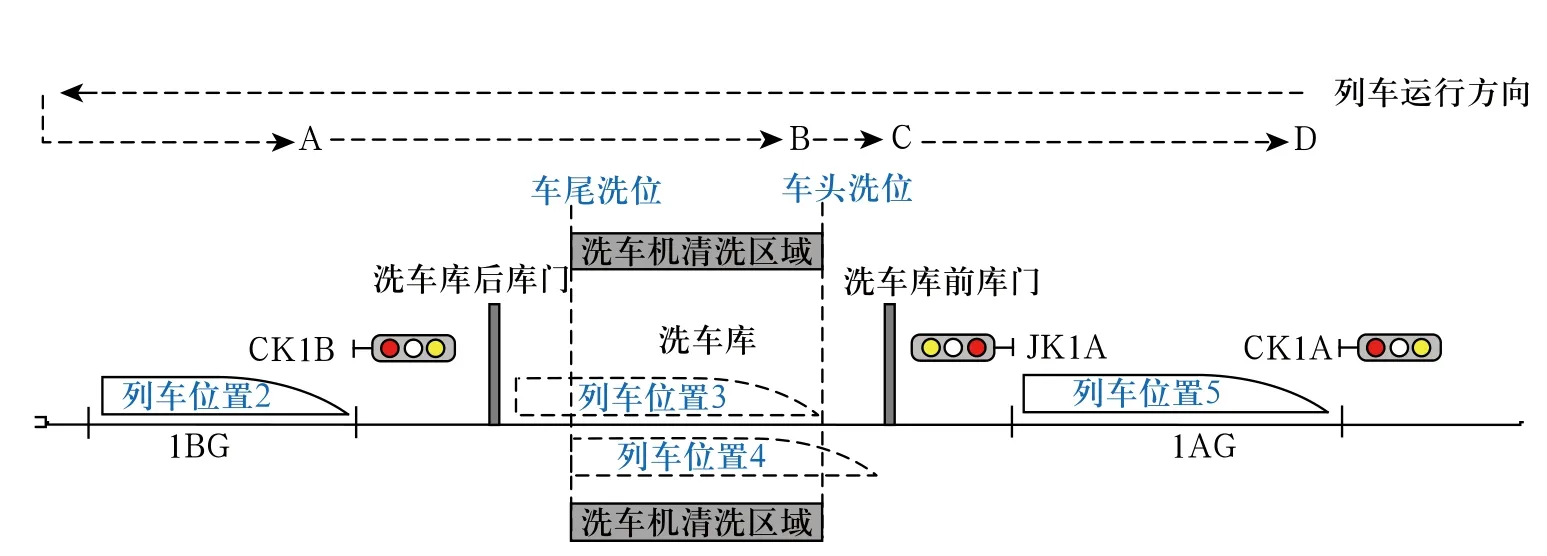
图2 尽头式冼车库自动冼车示意图Fig.2 Full automatic train washing in stub-end type washing garage
6)当完成洗车任务后,洗车机通过联锁系统向车载发送移动指令。车载收到指令后继续向前移动至图2中的D点停车,如图2中列车位置5所示。
7)列车根据出库信号机CK1A的信号显示驶离洗车库,信号开放应检查洗车机归位至限界处。当CI检查到防护进路空闲,且列车位置已出清洗车库门相邻区段,且运行方向为出库方向时,方可关闭洗车库库门。
3.3 贯通式洗车库作业场景分析(采用接触网受电)
1)人工为洗车机上电,列车运行至洗车库前停稳,此阶段流程和3.2 节尽头式洗车库作业中的1)和2)相同。
2)列车按指令在洗车库前停车,如图3中A点。联锁系统按照受电弓的固定编号向车辆发送指令提示换弓;车辆收到指令后根据受电弓状态继续进行换弓,完成后向信号系统反馈就位信号。
3)车载通过联锁系统向洗车机发送自动洗车请求,收到确认回复后,车辆控制列车低速运行至车头洗位(图3中B点)精确停车。洗车机收到停稳信息后,进行前端洗车。
4)前端洗车完毕后,列车继续前行至换弓点停稳,洗车机收到停稳信息后停止洗车。车辆系统再次进行换弓。完成后信号系统再次启动洗车命令,列车继续向前移动,在此过程中洗车机持续对车身侧面进行清洗。列车运行至车尾洗位(图3中C点)时,联锁系统将停稳信息转发给洗车机;收到停稳信息后,洗车机进行尾端洗车流程。
5)尾端洗车完毕后,洗车机通过联锁系统向车载发送移动指令。车载收到指令后继续向前移动至图3中的D点停车。
6)列车根据出库信号机CK1B的信号显示驶离洗车库。此阶段流程和3.3节尽头式洗车库作业中的7)相同。
4 洗车机接口方案设计
4.1 接口功能
1)为满足段内的全自动驾驶和有人驾驶的作业需要,联锁系统需增加与洗车机的接口,实现洗车机状态的采集,并将停稳等相关信息传递给ATS系统,实现全自动洗车作业。
2)为实现与车库门的联动,信号系统还需增加与洗车库库门的接口,接收车库门状态纳入联锁进路检查条件并传输到ATS,实现库门的联锁防护并实时监测,并向车库门发送车库门开启和关闭的指令。
3)ATS子系统增加提供人员防护开关、洗车机状态和洗车库库门状态的显示功能。并具备显示线路自动控制区域和非自动控制区域功能。
4.2 接口方式
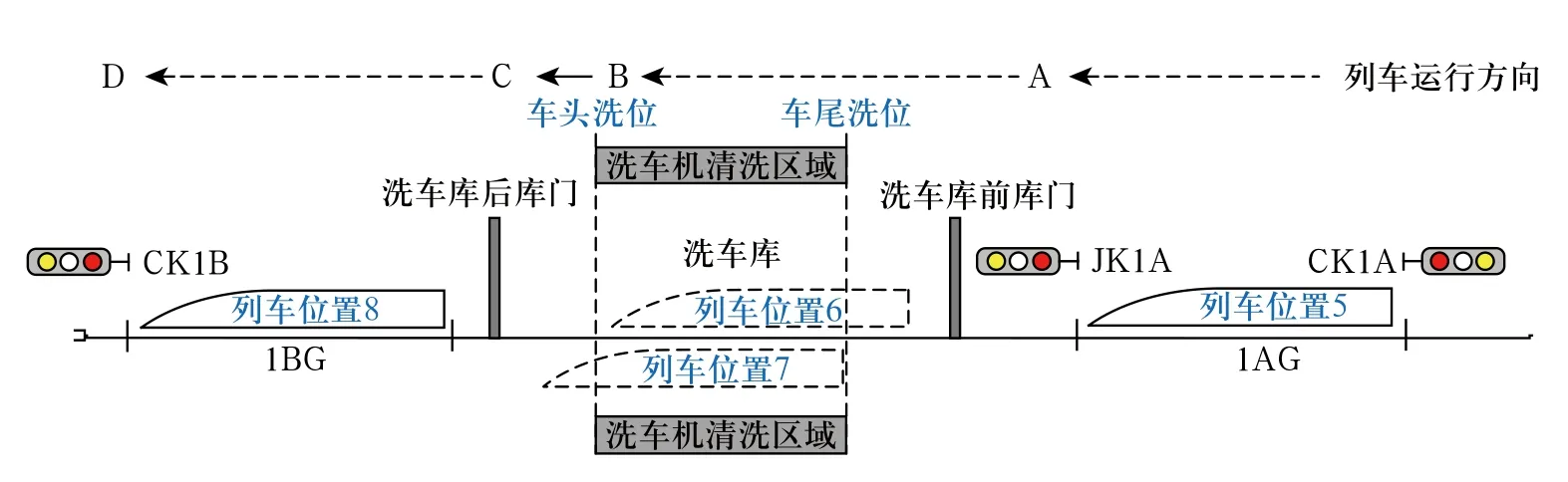
图3 贯通式冼车库自动冼车示意图Fig.3 Full automatic train washing in through type washing garage
洗车库内配备全自动洗车机,信号系统与全自动洗车机采用继电接口,互传控制和状态信息。继电电路均采用双断电路,安全继电器的状态通过安全型输入/输出板进行驱动和采集。信号系统内部信息传输采用信号系统内部的数据通信系统。
4.3 接口交互信息
车载设备通过联锁系统向洗车机发送列车停稳信息,洗车机通过联锁系统向车载设备发送洗车条件信息、允许列车移动信息以及洗车作业完成后的移动指令;联锁系统向洗车机发送洗车请求,列车停稳信息;同时联锁系统向ATS提供人员防护开关的状态、洗车机状态信息。ATS向联锁系统发送当天的运营计划和待洗列车的车次号等信息。
联锁系统和洗车机之间的信息交互内容如表1、2所示。
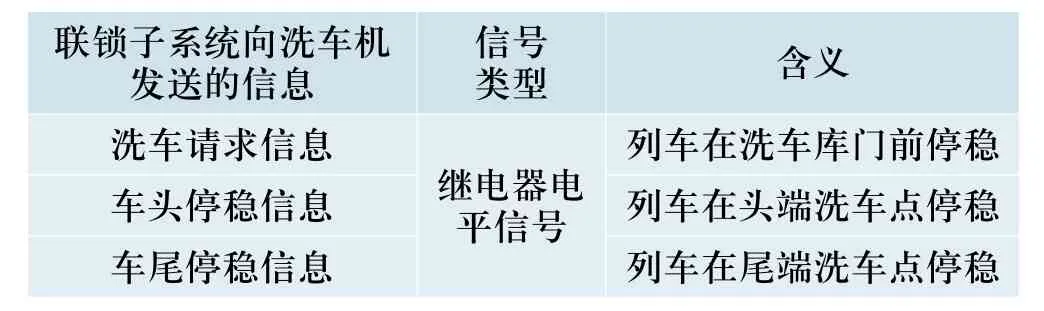
表1 联锁子系统向洗车机发送信息表Tab.1 Information from CI system to train washing machine
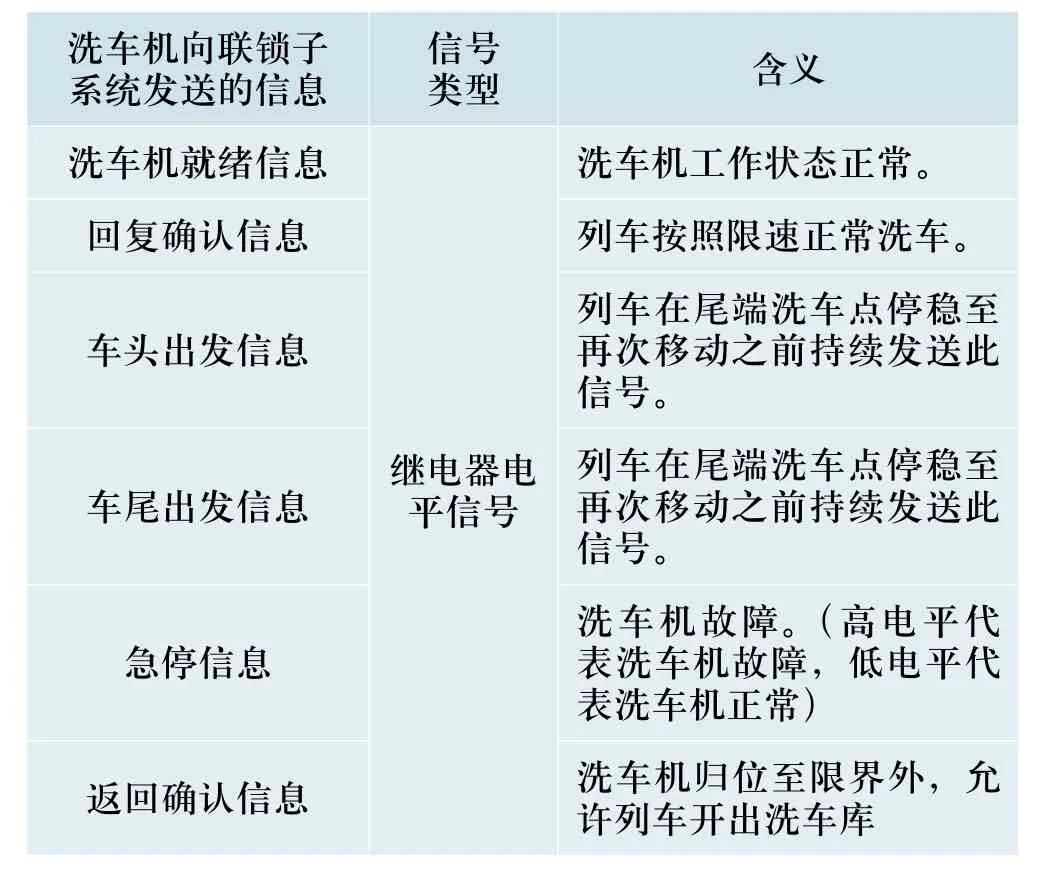
表2 洗车机向联锁子系统发送信息表Tab.2 Information from train washing machine to CI system
若列车采用接触网供电,在指定的停车换弓点联锁系统还需向车辆发送换弓提示,车辆根据受电弓状态判断并执行换弓动作,执行完成后向联锁系统发送确认信息。联锁子系统和车辆之间信息交互如表3所示。

表3 联锁子系统和车辆互传信息表Tab.3 Mutual information between CI system and train
5 结束语
总结全自动运行系统下自动洗车的功能和流程,对联锁系统与洗车机的接口方式和互传信息进行设计。本方案仅作为案例探讨,流程中还有诸多未考虑的因素和不完善之处。在方案设计过程中,应结合实际洗车流程和接口信息、接口方式等进行综合考虑,满足全自动运行系统的设计要求。